
Fターム[5B057AA05]の内容
Fターム[5B057AA05]に分類される特許
61 - 80 / 242
透明体検出システム
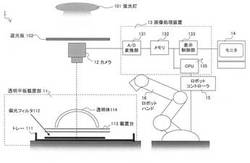
【課題】透明体の検出を簡易かつ高精度に行う。
【解決手段】透過光の偏光方向が変化する特性を有する透明体114を含む第一領域を撮像して、垂直偏光画像および水平偏光画像を撮像するカメラ12と、透明体114を載置する載置台113と、カメラ12から載置台113を挟んで、第一領域のうち少なくとも透明体114を含んで撮影される第二領域の範囲を含む位置に設置された偏光フィルタ112と、垂直偏光画像および水平偏光画像に基づく縦横偏光度画像の縦横偏光度の分布に基づいて透明体を検出する画像処理装置13とを備える。
(もっと読む)
物体認識方法及び物体認識装置

【課題】予め登録しておくモデルデータのデータ量を抑制しながら、対象物の位置や姿勢を迅速に求めることができる物体認識方法及び物体認識装置を提供する。
【解決手段】距離センサ1により、対象物201を含む所定領域内の各点までの距離計測を行い、三次元物体認識手段3により、これら各点の計測データをメッシュデータ化し、このメッシュデータのグルーピングを行って複数のメッシュグループとし、各メッシュグループの法線ベクトルに垂直な投影平面を作成し、各メッシュグループを対応する投影平面に投影した投影データを求め、投影データの輪郭データを抽出して、輪郭データと対象物の二次元形状データとを比較して、対象物の位置及び姿勢を認識する。
(もっと読む)
端材の管理方法および管理システム
【課題】切断装置の準備作業による占有時間の減少、大量の端材の一括準備作業による作業効率の向上、作業者のスケジュール調整を無くしての人的コスト低減、及び歩留まりを向上させる端材の管理方法および管理システムを提供する。
【解決手段】1または複数の切断装置によって生成された端材が切断装置から取り外され、端材置き場に格納される。格納されていた端材にマーカが付与され、撮像手段によって撮像され、切断すべき製品を示す図形が割り当てられた後に、端材が切断装置に据え付けられる。さらに、当該端材が撮像され、機械座標系における切断すべき製品を示す図形の位置のデータが取得され、制御手段の指示に従って、機械座標系における切断すべき製品を示す図形の位置のデータに基づき、この製品を示す図形が割り当てられた端材から製品が切断される。
(もっと読む)
推定装置及びその制御方法、プログラム
【課題】 三次元的に任意の位置姿勢をとりうる物体の位置姿勢を高精度かつ高速に推定するための技術を提供する。
【解決手段】 物体の位置姿勢を推定する推定装置であって、位置姿勢を推定する対象の対象物体を撮像する撮像手段であって、当該撮像手段から該対象物体までの距離情報を表す距離画像を生成する撮像手段と、前記距離画像を解析して前記対象物体の概略の位置姿勢を推定する概略推定手段と、予め定められた位置姿勢の範囲で物体の詳細な位置姿勢を推定する複数の識別手段と、前記概略推定手段が推定した前記概略の位置姿勢に基づいて、前記複数の識別手段の優先順位を決定する決定手段と、前記決定手段が決定した優先順位の順に、前記複数の識別手段を使用して前記対象物体の詳細な位置姿勢を推定する詳細推定手段とを備える。
(もっと読む)
画像変換方法及び装置、画像認識装置、ロボット制御装置並びに画像投影装置
【課題】本発明は、画像変換方法及び装置に関し、撮像された画像を、撮像角度に拘わらず撮像された画像中の位置座標を正確に検出可能な画像に変換可能とすることを目的とする。
【解決手段】コンピュータにより画像変換処理を行う画像変換方法において、基準面に対して光軸が任意の角度傾いたカメラにより撮像した撮像画像を、基準面に対して光軸が垂直な状態のカメラにより撮像した撮像画像と実質的に等価な画像に変換するように構成する。
(もっと読む)
シーンにおける物体の姿勢を求めるためのシステム及び方法
【課題】ロボットピッキングの用途について物体の姿勢を求める。
【解決手段】前処理中、仮想カメラのレンズのまわりに仮想点光源を配置することにより、さまざまな姿勢について物体の3Dモデルがレンダリングされる。影を使用して、複数の方向から照明された物体の配向された奥行きエッジが得られる。配向された奥行きエッジは、データベースに保存される。異なる方向からシーン上に影を投じることによって、カメラがシーンの画像を取得する。シーンは、互いに対して任意の姿勢で配置された1つ又は複数の物体を含むことができる。物体の姿勢は、取得された画像から得られる配向された奥行きエッジを、データベースに保存された配向された奥行きエッジと比較することによって求められる。この比較により、各ピクセルにおいて、面取り照合に基づきコスト関数の値が求められる。これは、滑降シンプレックス最適化を使用して高速化することができる。
(もっと読む)
画像のセットからピクセルを抽出するための方法およびシステム
【課題】本発明は、画像のセットを前景部分と背景部分とにセグメンテーションするための方法およびシステムを提供する。
【解決手段】シーンの画像のセットがカメラによって取得される。シーンは、移動物体を含み、カメラの動きと物体の動きとの相対的な差は、実質的にゼロである。画像のピクセルの統計的特性が求められ、統計的方法が、統計的特性に適用されて、物体に対応するピクセルが識別される。
(もっと読む)
画像処理方法
【課題】立体的な対象物体の三次元形状を計測する際に問題となる画像中に観測される垂直成分領域の判定を行う画像処理方法を提供する。
【解決手段】画像処理方法は、照明装置F1で対象物Qを照明し、カメラC1によって撮像した2次元画像データFD12を得る第一撮像工程と、第一撮像工程と同一のカメラC1によって同一の対象物Qを、対象物Qの側面への照明条件が照明装置F1と異なる補助照明F21で照明して撮像した2次元画像データFD13を得る第二撮像工程と、を行い、この2次元画像データFD12とFD13とから反射光量による輝度値の変動領域から対象物の側面を示す垂直成分領域を判定する判定工程とを具備するようにし、対象物Qの側面領域が容易に抽出可能になる効果を奏する。
(もっと読む)
姿勢認識方法およびこの方法を用いた3次元視覚センサ
【課題】円形状の面の姿勢を認識するのに必要な3次元座標を得るための処理を高速化し、かつ3次元座標の計測誤差が小さくなるようにする。
【解決手段】円形物を対象にしたステレオ撮像により生成された各画像を処理して、円の輪郭線を表すエッジ画像を生成し、基準画像から生成されたエッジ画像から複数のモデル円弧P1,P4,P5,P8を抽出して、各モデル円弧毎に1点ずつ計測対象点R1,R4,R5,R8に設定する。つぎに、比較画像から生成されたエッジ画像を、基準画像を生成したカメラと同一の光軸方向から撮像を行った場合の画像に変換し、変換処理後のエッジ画像から各モデル円弧P1,P4,P5,P8に対応する円弧を抽出し、各計測対象点R1,R4,R5,R8への対応点を特定する。そして、画像間で対応づけされた計測対象点の3次元座標を算出し、各3次元座標が分布する平面の方程式を特定する。
(もっと読む)
シミュレーションシステム
【課題】
現実世界とほぼ同等の動作を再現可能な自律移動シミュレーションを行う。
【解決手段】
ロボットに搭載されたセンサで取得できるデータをシミュレーションするセンサシミュレーション部と、前記センサで取得した取得センサデータに、属性が付加されている点が含まれるかどうか判定し、属性が含まれている点群に対して、センサデータ補正パラメータに応じた補正を行い、補正センサデータを出力するセンサデータ補正部と、前記出力補正センサデータおよび属性反映2次元環境地図の照合処理により2次元環境地図内のロボットの位置姿勢を推定し、仮想ロボット推定位置および姿勢データを出力する仮想ロボット位置・姿勢推定部と、次の移動先を決定する移動目標位置決定部と、決定された値に応じて仮想ロボット位置および姿勢を更新する移動部、とを備える。
(もっと読む)
ロボットシステム
【課題】検出精度を低下させることなく、カメラの視界が通い箱に遮蔽されず、またカメラが通い箱に干渉せずにビンピッキングを行うことができるロボットシステムを提供する。
【解決手段】 画像処理装置906は、ワークの2次元モデル109と、2次元ワーク位置検出部108と、通い箱を複数のエリアに分割し、各エリアについてエリア別視線を定義したエリアモデル106と、ピッキング対象ワークが属しているエリアに定義されたエリア別視線を出力するエリア判定部103と、ワークの3次元モデル105と、ピッキング対象ワークを撮像した画像から、3次元位置姿勢を検出する3次元ワーク位置検出部102と、ワークに対して複数の方向からのカメラの視線方向を定義した視線モデル107と、ピッキング対象ワークへアプローチする際のカメラの視線を演算する視線演算部104を備える。
(もっと読む)
シミュレーション装置,シミュレーション方法およびシミュレーションプログラム
【課題】三次元モデルを用いたシミュレーション装置において,画像認識を行わずに,パターン認識による二次元位置の検出をシミュレートする技術を提供する。
【解決手段】シミュレーション装置において,三次元機構モデル情報記憶部33には,マークセンサモデルと基準マークモデルとを含む三次元機構モデルのデータが記憶されている。基準マーク検出部34において,マークセンサ検出領域設定部303は,マークセンサモデルに設定された,実カメラの光学的仕様のデータに基づいて,三次元機構モデルの空間にマークセンサ検出領域を設定する。基準マーク抽出部304は,マークセンサ検出領域内に存在する基準マークモデルを抽出する。検出結果設定部308は,抽出された基準マークモデルの位置から求められる,基準マーク検出の目的となる検出位置の座標を,基準マーク検出結果に設定する。
(もっと読む)
画像処理型測定機および画像処理測定方法
【課題】赤、緑、青等の少なくとも1以上に着色された被測定物の画像に対して、エッジ検出の信頼性を向上させる。
【解決手段】赤色LED31、緑色LED32および青色LED33を有する照明装置30と、各光源の照度を独立的に制御可能な制御部61と、被測定物1からの反射光を赤色光、緑色光および青色光に分光し、それぞれの光に基づく赤色光画像信号R、緑色光画像信号Gおよび青色光画像信号Bに分解して出力するカラーイメージセンサ50と、赤色LED、緑色LEDおよび青色LEDからのいずれかの光を被測定物に照射したときに、カラーイメージセンサから得られる画像信号のうち照射光と同じ色の画像信号に対して濃淡画像処理を施す画像処理部62とを備える。
(もっと読む)
ロボットシステムおよびロボットシステムの制御方法
【課題】ワークが撮像されたボケ画像からワークの位置を精度良く検出するロボットシステムを提供する。
【解決手段】ワークWに対して作業を実施するロボット10と、前記ワークWを載置するとともに、蛍光体マーカー74を備えたステージ72と、前記ワークWと前記蛍光体マーカー74とを所定の露光時間で撮像するカメラ20と、前記カメラ20の露光時間より短い周期で前記蛍光体マーカー74を点滅発光させるマーカー制御部45と、を備え、前記カメラ20により撮像されたボケ画像から前記蛍光体マーカー74の軌跡画像100を抽出して、前記軌跡画像100から点拡散関数を算出する点拡散関数算出部35と、算出した前記点拡散関数を用いて、前記ボケ画像を画像変換し前記ボケ画像からボケていない元画像を生成する画像生成部37と、前記元画像から前記ワークWの位置を算出する位置算出部39と、を有するロボットシステム5。
(もっと読む)
視覚に基づく3次元形状認識を備えたロボット
【課題】2次元(2D)の視覚信号から、対象物の3次元(3D)形状を認識する。
【解決手段】ビデオ信号において表される対象物について、3D形状の情報を抽出するため、ビデオセンサからの該ビデオ信号を処理するための方法であって、対象物が、3D形状空間において格納されるメモリを提供するステップであって、該形状空間は、該対象物の3D形状の特性をコード化する抽象特徴空間である、ステップと、対象物の2Dのビデオ信号の表現を、前記形状空間にマッピングするステップであって、該形状空間における対象物の座標は、該対象物の3D形状および(または)物理的特性を示す、ステップと、を含む。
(もっと読む)
ロボット制御システム及びロボット制御プログラム
【課題】物体の搬送作業を行えるロボットを好適に制御できるロボット制御システムを、提供する。
【解決手段】カメラ画像が表示されているタッチスクリーン上の或る範囲を指定する操作が行われた場合、カメラ画像に対する画像セグメンテーション処理結果を利用して、カメラ画像中の、ユーザが指定した範囲内に所定割合以上の部分が含まれているセグメント群からなる画像を探索し、探索した画像を、搬送対象物の画像として特定(S102)し、特定した画像に基づき搬送対象物をロボットに搬送させる制御処理(S110)を行う。
(もっと読む)
3次元曲面認識方法及びマニピュレーションシステム
【課題】配管エルボーのような屈曲した円柱の位置姿勢を認識してロボットにより把持する。
【解決手段】主ベクトルと法線を3次元点に対して計算し、その単位球上の統計的な分布からモデルとの照合を行う。主ベクトルが平面上に分布する形状について、平面の姿勢を特定したあとで平面内の回転を計算し、姿勢を特定後に平行移動成分を計算する。その結果の変換行列を用いて把持点を計算し、ロボットで把持する。
(もっと読む)
位置姿勢計測装置、およびワーク搬送組立装置
【課題】
計測対象物の色や光沢に左右されることなく、計測対象物を撮像した画像における計測対象物と背景とのコントラストの差を簡易な構成で確実に大きくし、計測対象物の位置および姿勢を高精度に計測すること。
【解決手段】
計測対象物を撮像するカメラと、カメラ側から計測対象物に向けて発光する第1照明と、前記計測対象物を挟んで前記第1照明と反対側に設けられた第2照明と、計測対象物の輪郭より大きな開口部を備え、遮光部材によって第2照明を覆うカバーと、第1照明の点灯および消灯を制御する第1照明制御部と前記第2照明の点灯および消灯を制御する第2照明制御部と撮像画像に基づいて画像処理により、計測対象物の位置および姿勢を計測する。
(もっと読む)
画像測定プローブと操作方法
測定対象物体の画像を取得し、これを供給するための画像測定プローブの操作方法。画像測定プローブは、座標位置決め装置の連続的角度調整可能ヘッドに取り付けられ、連続的角度調整可能ヘッドは少なくとも1つの回転軸を有する。物体と画像測定プローブは、測定動作中、その少なくとも1の回転軸の周囲で、および少なくとも1自由度の直線運動で相互に関して移動できる。この方法は、画像測定プローブによって取得された少なくとも1つの画像を処理してフィードバックデータを得るステップと、画像測定プローブと物体との間の物理的関係を、前記フィードバックデータに基づいて制御するステップと、を含む。  (もっと読む)
(もっと読む)
ロボットの干渉防止方法
【課題】簡便な方法にてロボットに接近する物体の有無を検出する方法を提供する。
【解決手段】第1ロボットの第3腕に設置され焦点が固定された第3撮像装置を用いて第2ロボットを撮影し画像を生成するステップS1の撮影工程と、第1ロボットの回転台、第1腕、第2腕、第3腕を移動するステップS2の移動工程と、生成した画像に焦点のあった像である合焦点像が撮影されたかを検出するステップS3の画像判断工程と、合焦点像が撮影されたときに手部と第2ロボットとの間隔を狭くしないステップS4の干渉防止工程と、を有する。
(もっと読む)
61 - 80 / 242
[ Back to top ]