
Fターム[5B057AA05]の内容
Fターム[5B057AA05]に分類される特許
21 - 40 / 242
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
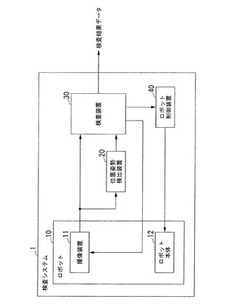
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
3次元環境復元装置、その処理方法、及びプログラム

【課題】マップ情報の精度を維持しつつ、マップ情報のメモリ消費量を効果的に低減すること。
【解決手段】3次元環境復元装置は、所定空間内の対象物体の3次元計測を行う計測手段と、計測手段により計測された対象物体の3次元計測データに基づいて、3次元環境が格子領域に区切られて対象物体が存在する格子領域に直方体が配置され、配置された直方体内に3次元点群データを含むマップ情報を生成するマップ情報生成手段と、マップ情報生成手段により生成されたマップ情報の直方体内の3次元点群データに基づいて、3次元点群データを線分近似した芯線情報を生成する芯線情報生成手段と、を備えている。
(もっと読む)
微細非周期パターン投影装置および方法とそれを用いた三次元計測装置
【課題】ユニークな特徴をもつ非周期パターンを投影して、なめらかな表面をもつ物体の三次元形状を計測する。
【解決手段】2種の菱形で構成した非周期パターン模様をワークに投影しステレオカメラで計測する。
(もっと読む)
段差エッジ推定装置
【課題】撮像手段により取得されるステレオ画像を利用して、階段等の段差部の平坦面部の先端部のエッジの位置及び方向を精度良く推定することを可能とする装置を提供する。
【解決手段】撮像手段3R,3Lにより撮像した2つの撮像画像(ステレオ画像)を用いて段差部(階段)50の段差エッジ52の位置及び方向を推定する。第1の撮像画像に設定した領域における画像の素値分布と、第2の撮像画像の対応領域における画像を平面パラメータに応じて射影変換してなる画像の画素値分布との間の誤差を表す誤差関数を線形結合して構成される評価関数を算出し、この評価関数の値を最小化するように、段差エッジの位置及び方向を表す段差エッジパラメータを探索的に特定する。
(もっと読む)
画像処理装置および画像処理システム
【課題】撮像装置に対する撮像指示を発生してから実際に撮像が行われるまでにタイムラグが存在する場合であっても、正確にトラッキング処理を行うことのできる視覚センサを提供する。
【解決手段】画像処理装置は、搬送装置の搬送経路における移動量を示す信号を受付けるインターフェイスと、搬送経路において撮像部の撮像範囲より下流側に配置されるとともにワークを取り扱う移動機械、を制御するための制御装置と通信するためのインターフェイスと、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する手段と、制御装置との間で搬送経路における移動量を同期して保持する手段と、撮像指示に応答して撮像部による撮像を開始する手段と、位置情報と当該位置情報の取得に用いた画像を撮像したときの移動量とを制御装置へ送信する手段とを含む。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】ターゲットのサブピクセルレベルでの位置検出を高精度に行う。
【解決手段】ロボット装置1は、ターゲットを搬送可能に保持する多関節ロボット10と、ゴール位置とターゲットとを撮像する撮像装置20と、画像上のゴール位置にピクセルレベルで位置合わせされたターゲットをサブピクセルレベルの変位量で変位させたときの画素値の変化量により表される感度に応じて、ターゲットが配置された状態のゴール画像データを記憶するゴール画像記憶部と、撮像装置20から得られるターゲットを含む画像データとゴール画像記憶部に記憶されたゴール画像データとの比較に基づいてターゲットの一致度評価値を計算し、この一致度評価値に基づいてゴール位置に対するターゲットの位置ずれを検出するターゲット検出部と、この位置ずれをなくす方向にターゲットを搬送するよう多関節ロボット10を制御するロボット制御装置50とを備えた。
(もっと読む)
ロボット装置、検査装置、検査プログラム、および検査方法
【課題】照明条件や撮影条件の変化に対して頑健な外観検査を行う。
【解決手段】ロボット装置は、ねじ穴を有する検査対象物体を撮像し、ねじ穴の画像の検査領域が含まれる検査対象物体画像の画像データを生成する撮像部と、この撮像部を可動に支持するロボット本体と、画像データから、検査領域の輝度値を検出する検査領域輝度値検出部212と、画像データから、検査領域の近傍の参照領域の輝度値を検出する参照領域輝度値検出部213と、検査領域輝度値検出部212が検出する検査領域の輝度値と参照領域輝度値検出部213が検出する参照領域の輝度値との比または差に基づいて、検査領域の状態を判定する判定部214とを備えた。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】単純な形状に限らず認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づいて、認識対象物または3次元モデルを対称的に配置した2つの姿勢候補を示す姿勢候補情報を生成する姿勢候補情報生成部234と、認識対象物の姿勢候補情報と3次元モデル情報とに基づいて、または、認識対象情報と3次元モデルの姿勢候補情報とに基づいて認識対象物の位置および姿勢を特定する認識対象物特定部236とを備える。
(もっと読む)
撮像装置、撮像条件設定方法、プログラム
【課題】誤った識別結果が得られた場合であっても、正しい識別結果が得られる撮像条件を高速に設定できる撮像条件設定方法を提供すること。
【解決手段】対象物の識別に用いる画像の撮像条件を設定する撮像条件設定方法であって、画像を用いて対象物を識別する対象物識別工程S1−1と、対象物を識別可能な撮像条件の範囲である識別可能範囲を生成する識別可能範囲生成工程S1−3と、対象物が同一であると識別される撮像条件の範囲である同一識別結果範囲を生成する同一識別結果範囲生成工程S1−2と、撮像条件を変更する規程である撮像条件設定規程を識別可能範囲と同一識別結果範囲とを用いて生成する撮像条件設定規程生成工程S1−4と、撮像条件設定規程生成工程において生成された撮像条件設定規程を用いて対象物の識別が可能な撮像条件を設定する撮像条件設定工程S2−4を備える。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
3次元座標計測装置
【課題】精度良くセンサ座標系を世界座標系に変換する。
【解決手段】基準プレート50を世界座標系でキャリブレーションされた3次元絶対座標計測器60で計測して、世界座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。また、3次元座標計測ロボット10の3次元センサ部8を指令値に応じた位置に移動させ、基準プレート50にスリット光を投射して撮像し、撮像した画像からセンサ座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。世界座標系及びセンサ座標系の各々における基準点の3次元座標、法線ベクトル、及びエッジベクトルを用いて、センサ座標系を世界座標系に変換する変換パラメータを、指令値毎に算出する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】物体の状態の推定処理を高速化させる。
【解決手段】ワーク状態推定部110は、カメラ103により複数の物体が撮像された画像データに基づいて、複数の物体の状態を推定する。取り出しワーク選定部110は、推定された複数の物体の状態を示す第1の状態情報に基づいて、複数の物体から取り出される物体を選定する。制限範囲設定部112は、複数の物体のうちの物体以外の他の物体の状態を示す第2の状態情報に基づいて、他の物体の状態の推定処理を制限する範囲を示す制限範囲情報を生成する。ワーク状態推定部110は、制限範囲情報に従って、他の物体の状態を推定する。
(もっと読む)
コーティング部材の孔位置特定装置
【課題】ガスタービン翼に遮熱コーティングがされた後であっても、通気孔(フィルム冷却孔)の位置を容易・確実に特定する。
【解決手段】ガスタービン翼50に遮熱コーティング層54が形成される前に、固定治具11に固定されたガスタービン翼50を、カメラ13により撮影し、撮影した画像信号を制御装置14に伝送して記憶する。制御装置14では、画像信号を画像処理して、ガスタービン翼50の目印位置を特定し、目印位置を基点とした各通気孔53の相対座標位置を算出する。ガスタービン翼50に遮熱コーティング層54が形成された後に、制御装置14により、マニプレータ12の作動を制御することにより、マニプレータ12に装着したマーカ装置15を、目印位置に正対させた後にこの目印位置を基点として通気孔の相対座標位置にまで移動させ、更に、マーカ装置12を作動させて遮熱コーティング層54上の相対座標位置にマーキングをする。
(もっと読む)
画像生成装置、画像生成方法、およびプログラム
【課題】把持機構等の不要部分のない対象物のみの姿勢別画像を簡便な画像処理で得る。
【解決手段】対象物の画像を生成する画像生成装置であって、対象物を把持する把持部と、対象物と把持部との少なくとも1つの画像を撮像する撮像部と、把持部により把持された対象物が、撮像部に対して複数の所定姿勢のうちの1つの所定姿勢となるように把持部を制御する制御部と、撮像部により撮像された1つの所定姿勢にある対象物および対象物が1つの所定姿勢となるように制御された把持部の画像と、1つの所定姿勢とを関連付けて、把持状態画像として取得する第1の画像取得部と、対象物を把持しておらず且つ対象物が1つの所定姿勢となるように制御された姿勢と一致する所定姿勢である把持部の画像を非把持状態画像として取得する第2の画像取得部と、把持状態画像と、非把持状態画像との差分に基づいて、1つの所定姿勢について対象物のみの対象物画像を生成する画像生成部と、を備える。
(もっと読む)
3次元環境復元装置、3次元環境復元方法、及びロボット
【課題】動的な環境下においても、効率的にマップ更新処理を可能とする。
【解決手段】3次元環境復元装置10は、環境を3次元で計測する環境認識センサ5と、計測された計測データから、観測物体の3次元形状を表す3次元点群を生成する3次元点群生成処理部11と、3次元環境を表現するデータ構造であって、当該3次元環境が格子領域に区切られて観測物体が存在する格子領域に直方体が配置された3次元環境マップを多段マップとして、生成された3次元点群データを用いて多段マップを時分割で生成し、当該生成した多段マップを記憶手段に規定時間分蓄積する時分割多段マップ生成/蓄積処理部12と、蓄積された規定時間分の多段マップと、新たに生成された多段マップと、を合成することで、新たな環境情報を反映させた全体多段マップを生成する全体多段マップ生成処理部13と、を備える。
(もっと読む)
部品検索システム
【課題】現物から必要な情報を得ることで、部品のデータ検索を短時間で容易に行なえるようにする。
【解決手段】部品Pを設置するテーブル2と、テーブル2に設置された部品Pの重量を計測する重量計3と、テーブル2に設置された部品Pに光を照射する光源4と、光源4から光を照射することによって部品Pが投影される透視可能な透過型スクリーン5と、部品Pが光によって透過型スクリーン5に投影されることで当該透過型スクリーン5の裏側に映し出される部品Pの投影像PIを、当該透過型スクリーン5を挟んで光源とは反対側から撮像するカメラ6と、光源4、透過型スクリーン5及びカメラ6が固定されている計測用アーム7と、計測用アーム7を移動させるロボット8と、ロボット8を制御すると共にカメラ6で撮像された部品Pの投影像PIに基づき部品Pの3次元形状を得るために画像処理を施す部品検索装置9とを備えている。
(もっと読む)
形状計測装置、ロボットシステムおよび形状計測方法
【課題】計測対象物の走査に要する合計の時間を短くすることが可能な形状計測装置を提供する。
【解決手段】このセンサユニット(形状計測装置)4は、レーザ光を照射するレーザ発生器15と、レーザ発生器15から照射されたレーザスリット光をワーク200の載置されている領域に走査するミラー部16と、ミラー部16から照射され、計測対象物により反射されたレーザ光の反射光を検出することにより、ワーク200の載置されている領域を検出するとともに、ワーク200の3次元計測を行う高速カメラ11と、高速カメラ11によって検出されたワーク200の載置されている領域に応じてミラー部16による走査範囲を変更するように制御するセンサコントローラ13とを備える。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
21 - 40 / 242
[ Back to top ]