
Fターム[5B057AA05]の内容
Fターム[5B057AA05]に分類される特許
121 - 140 / 242
情報処理装置、および情報処理方法、並びにコンピュータ・プログラム
【課題】効率的かつ確実な3次元画像データ生成処理を実現する構成を実現する。
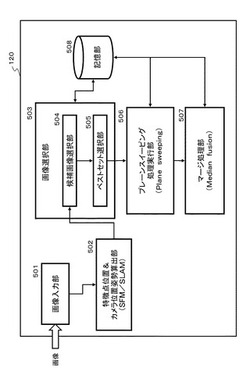
【解決手段】画像に含まれる画素の3次元位置決定処理として実行する3次元画像データ生成処理に適用する画像の選択処理に際して、画像フレーム各々について、特定の参照画像フレームに対する3次元画像データ生成に適する画像であるか否かを判定し、適切と判定した画像のみを候補画像として選択し、さらに候補画像を複数組み合わせて設定した画像セットから、3次元画像データ生成処理に適用する最適な画像セットをベストセットとして選択し、このベストセットを利用した3次元画像データ生成処理を実行する構成とした。
(もっと読む)
三次元位置姿勢計測方法および装置

【課題】物体(対象物)の画像教示なしに、1台のカメラで物体の位置と姿勢を正確に検出することができる三次元位置姿勢計測方法および装置を提供する。
【解決手段】対象物1のモデルデータ5を予め記憶するモデル入力ステップS1と、検出する対象物を撮影して画像2を取得する画像撮影ステップS2と、画像2からモデルデータに対応する画像上の特徴データ6を抽出する特徴抽出ステップS3と、モデルデータと画像上の特徴データとの幾何学的一致度を評価する一致度評価ステップS5と、モデルデータが幾何学的一致度の高い画像上の特徴データの位置に移動するように座標変換式を算出する座標変換ステップS7と、座標変換式により対象物1の三次元位置姿勢を決定する位置姿勢決定ステップS8とを有する。
(もっと読む)
スマートカメラ及びロボットビジョンシステム
【課題】ロボットの各種制御等に際し、ネットワークを介してのより自由度の高い、しかもより効率のよいデータ授受を可能とするスマートカメラ、及び該スマートカメラを備えるロボットビジョンシステムを提供する。
【解決手段】スマートカメラは、第1コマンドインタフェースCIF1(以下、CIF1)と第2コマンドインタフェースCIF2(以下、CIF2)とを有する。画像処理プロセスDPはCIF1から入力される指令に基づいて撮像データDT1を画像処理し、ロボットの制御に有益な情報からなる結果データDT3を生成してこれを結果データバッファDB3に保存し、またCIF1に出力可能にする。一方、イメージセレクタSWはCIF2から入力される指令に基づいて撮像データDT1または処理画像データDT2のいずれかをモニタ画像データとして選択してこれをCIF2から出力する。
(もっと読む)
移動ロボット及び環境地図の生成方法
【課題】段差等のエッジ部分が不明瞭となることを防いで精細な環境地図を生成可能とする。
【解決手段】自律移動ロボット100は、視覚センサ11による計測結果を用いて、移動空間に存在する計測対象の位置を示す3次元位置データを生成する3次元位置データ生成部12と、異なるロボット位置で計測された複数の3次元位置データを統合することによって移動空間に関する環境地図を生成する地図生成部13を有する。地図生成部13は、3次元位置データ生成部12によって生成された新たな3次元位置データが予め定められた信頼度を有する場合に、新たな3次元位置データと重複する過去の環境地図内の領域を、新たな3次元位置データで上書き更新することによって新たな環境地図を生成する。
(もっと読む)
画像情報生成装置及び画像情報生成方法。
【課題】安価に構成することができ、使用することができる状況の制約が少なく、2次元画像情報及び3次元情報の両方を高速に生成することができる画像情報生成装置を提供する。
【解決手段】処理選択部260は、投影用光源204を消灯させ照明用光源214を点灯させているフレームFL1,FL3,FL5,・・・にカメラ224に第1の撮像を行わせ生成させた画像信号をデジタル化した第1の画像データD1,D3,D5,・・・を投影可否判定部270に処理させ、照明用光源214を消灯させ投影用光源204を点灯させているフレームFL2,FL4,FL6,・・・にカメラ224に第2の撮像を行わせ生成させた画像信号をデジタル化した第2の画像データD2,D4,D6,・・・を3次元情報生成部262に処理させる。3次元情報生成部262は、半導体ウエハWに関する3次元情報を画像データD2,D4,D6,・・・から生成する。
(もっと読む)
動体の動作認識方法
【課題】観察方向によらずに、自動かつ高速に、対象動体の動作を認識可能な動体の動作認識方法を提供する。
【解決手段】予め動体Aの基本動作ごとのフレーム画像データAが点で表示される固有空間データAを作成してデータベース化する固有空間データ作成工程と、対象となる動体Bのフレーム画像データBが点で表示された固有空間データBと基本動作ごとの固有空間データAを比較して、固有空間データBからの距離が最も近い固有空間データAを選び、動体Bの動作を認識する認識工程とを有する動体の動作認識方法であって、基本動作ごとの各フレーム画像データAは、動体Aに基本動作を行わせ、基本動作を行う動体Aを複数の画像入力手段を用いて多方向から撮影し、画像入力手段ごとに取得した連続する複数のフレーム画像にそれぞれ重みをつけた後、重ね合わせることで作成される圧縮画像から得る。
(もっと読む)
作業装置及びその校正方法
【課題】画像計測時にマーカの中心部を含む部分が遮蔽されていても作業部の位置の校正を行うことを可能とする。
【解決手段】作業装置は、被作業物体に対して作業を行う作業部と、マーカ中心点から放射状に複数のマーカが配置された校正治具とを有し、複数のマーカは、立体的に配置されており、校正治具は、作業部に対して設定された校正用の基準点とマーカ中心点とが一致するように作業部に装着されている。
(もっと読む)
障害物検出システム及び障害物検出方法
【課題】正確に床検出を行うことが可能な障害物検出システム及び移動ロボットを提供すること。
【解決手段】本発明にかかる障害物検出システム100は、距離画像データを生成する距離画像センサ1と、前記距離画像データに基づいて障害物を検出するデータ処理部2とを備えている。データ処理部2は、距離画像センサ1により生成された距離画像データより得られる反射光強度と、距離画像センサ1によって生成された距離画像データによる距離に基づいて、障害物を検出する。
(もっと読む)
動的アラインメント・ビーム校正のためのシステムおよび方法
【課題】動的アラインメント・ビーム校正のためのシステムおよび方法
【解決手段】プラズマ処理システムにおいてDA(動的アラインメント)ビーム校正を実施するための方法が提供される。方法は、位置差を取得することを含み、位置差は、光学的撮像手法を使用して取得される。光学的撮像手法は、ウエハをエンドエフェクタ上に位置決めすることと、エンドエフェクタ上のウエハの静止画像を撮影することと、ウエハの中心およびエンドエフェクタによって定められたエンドエフェクタ規定中心を決定するために静止画像を処理することと、ウエハの中心とエンドエフェクタによって定められたエンドエフェクタ規定中心との間の位置差を決定することとを含む。方法は、また、ウエハとエンドエフェクタとの間の位置差をロボット移動補償によって補償することによってウエハをエンドエフェクタに対して中心合わせすることを含む。方法は、ウエハおよびエンドエフェクタに、プラズマ処理モジュールに付随するDAビームを通らせることを含む。方法は、また、DAビームの遮断−回復パターンを記録することによって基準DAビームパターンを得ることを含む。遮断−回復パターンは、ウエハおよびエンドエフェクタがDAビームを通って移動するのに伴って生じる。
(もっと読む)
移動型ロボット
【課題】ロボットの動作、実行タスク又は認識対象に対応でき、認識対象の認識精度を高くすると共に画像処理での演算量の増加を抑える移動型ロボットを提供する。
【解決手段】視覚センサC,Cが取得した撮影画像を画像処理し、撮影画像に含まれる対象に関する認識情報を生成する画像処理部10と、画像処理部10が生成した認識情報に基づいて統括制御を行う主制御部40と、を備えるロボットRであって、画像処理部10は、複数解像度画像生成部11と、低解像度画像処理部12と、所定の入力情報又は予め設定したルールに基づいて、高解像度画像を画像処理するか否かを判定すると共に、何れの解像度の高解像度画像を画像処理するかを判定し、低解像度画像の一部に解像度処理領域を設定する画像処理判定部13と、高解像度画像処理部14と、画像処理結果統合部15と、を備える。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラムおよび位置検出装置並びにそれを備えた移動体
【課題】ステレオ視により広角撮影した撮影画像を画像処理する際に、メモリ使用量および処理時間を低減することができる画像処理装置を提供すること。
【解決手段】画像処理装置3は、対象物Mを広角撮影可能で直線上に配置された2つのカメラCで撮像した画像により、対象物Mの位置を検出するために用いる情報として、対象物Mの画素位置を求めるために、2つのカメラCで撮像された画像を入力する画像入力手段10と、各カメラCから入力された画像を、その歪を補正した状態で、2つのカメラCの配置された直線と平行な軸線を持つ円筒面上に射影する画像射影手段30と、円筒面上に射影された画像において、対象物Mに対応する画素位置を検出する画素位置検出手段40とを備える。
(もっと読む)
物体認識装置およびロボット装置
【課題】距離データを用いて、対象物体の三次元的な位置姿勢を認識する。
【解決手段】物体の表面の三次元形状データを読み込み、物体の局所的な表面形状を表す特徴量を作成するモデル入力手段と、実際の環境を計測して距離データを取得し、物体の表面情報を作成するシーン計測手段と、シーン頂点の特徴量とモデル頂点の特徴量の類似度を算出し、それらシーン頂点とモデル頂点を対応点ペアとする対応点ペア作成手段と、対応点ペアを含むグループを作成し、対応点ペアとの関係で幾何学的一貫性を有する他の対応点ペアをグループに追加する処理を繰り返し、全ての対応点ペアを基準にグループを作成するグループ化手段と、グループに含まれる対応点ペアに基づき、モデルとシーンの対応点間の距離を最小にする座標変換式を算出し、座標変換式にしたがってモデルを移動させた結果をグループが示す物体の初期位置姿勢とする。
(もっと読む)
位置特定装置および動作指示装置並びに自走式ロボット
【課題】被搬送物等の指示対象物または搬送先等の指示対象位置の位置を特定する際の精度を向上させることができる位置特定装置および動作指示装置並びに自走式ロボットを提供することを目的とする。
【解決手段】複数の対象物の画像から算出した特徴量と位置情報とを関連付けて記憶する記憶部と、指示対象物の画像を取得する画像取得部と、該画像取得部により取得された前記指示対象物の画像から算出した特徴量と前記記憶部に記憶された複数の前記対象物の画像から算出した特徴量との比較を行う比較部と、該比較部による比較結果に基づいて前記指示対象物を特定する指示対象物特定部と、該指示対象物特定部により特定された前記指示対象物に対応する前記対象物の位置情報を、前記指示対象物の位置情報として前記記憶部より抽出する位置情報抽出部とを備える位置特定装置を採用する。
(もっと読む)
物体認識装置およびロボット装置
【課題】距離センサから得られる距離データを用いて、対象物体の三次元的な位置姿勢を認識する。
【解決手段】物体の位置及び姿勢を認識する物体認識装置であって、(1)モデル入力手段と、(2)シーン計測手段と、(3)対応点ペア作成手段と、(4)幾何学的一貫性を有する他の対応点ペアをグループGiに追加する処理を繰り返し、全ての対応点ペアを基準にグループを作成するグループ化手段と、(5)物体の位置姿勢を決定する一致度検証手段と、(6)位置姿勢を補正する処理を繰り返すことで高精度化し、最終的な位置姿勢を算出する高精度化手段を備える。
(もっと読む)
物体認識方法
【課題】距離センサから得られる距離データを用いて、対象物体の三次元的な位置姿勢を認識する。
【解決手段】距離を計測できるセンサによって計測したシーンデータと、目的物体の3次元形状を表すモデルデータとを、各点の表面形状を表す特徴量について照合することにより物体の3次元位置姿勢を検出する3次元物体認識方法において、(1)モデルデータの各点の特徴量を算出する前に、物体認識の運用条件を入力することによって、当該運用条件に基づき照合に有効な点を選定する第1のステップ、又は(2)モデルデータの各点の特徴量を算出した後に、各点の特徴量の類似度を解析し、照合に有効な特徴量を持つ点を選定する第2のステップ、の少なくとも一方のステップを含む。
(もっと読む)
物体認識方法
【課題】距離センサから得られる距離データを用いて、対象物体の三次元的な位置姿勢を認識する。
【解決手段】距離を計測できるセンサによって計測したシーンデータと、目的物体の三次元形状を表すモデルデータとを、物体の局所的な表面形状を表す特徴量について照合することにより物体の三次元位置姿勢を検出する三次元物体認識方法において、モデルを、候補となる位置姿勢に配置したとき、モデルによって遮蔽され、本来計測不可能な範囲にシーンデータが存在するか否かを算出し、この幾何学的な矛盾の有無に基づいて、モデルの位置姿勢候補の成否を検証する。
(もっと読む)
位置姿勢認識装置
【課題】同一形状の部品が乱雑に山積みされた部品群に対してもビンピッキングを可能とする位置姿勢認識装置及び方法、並びに上記位置姿勢認識装置を備えたピッキングシステムを提供する。
【解決手段】ワークピース80が山積みされたシーンを撮像すると同時に、その画素毎にシーンの奥行きを計測する手段20を設け、画像から抽出される直線状明領域に対してシーンの奥行き情報から、その3次元的姿勢を計算するようにした。
(もっと読む)
ロボットカメラパラメータ算出装置、被写体情報算出装置、ロボットカメラパラメータ算出プログラム及び被写体情報算出プログラム
【課題】カメラの位置に応じて撮影したい構図で被写体を撮影するためのカメラパラメータを算出することができるロボットカメラパラメータ算出装置を提供する。
【解決手段】ロボットカメラパラメータ算出装置5は、ロボットカメラの3次元の位置の情報を入力するロボットカメラデータ収集部(カメラ位置入力手段)51と、被写体の3次元の位置の情報と、撮影領域の大きさを特定する情報とを記憶するショットメモリ記憶部(被写体情報記憶手段)52と、ロボットカメラの3次元の位置の情報と被写体の3次元の位置の情報と撮影領域の大きさを特定する情報とに基づいて、撮影方向を示す情報とフォーカス値とズーム値とを算出するロボットカメラ駆動データ算出部(被写体距離算出手段、撮影方向算出手段、フォーカス値算出手段、ズーム値算出手段)53とを備えることを特徴とする。
(もっと読む)
ロボット、医療ワークステーションおよび、対象物の表面に画像を投影する方法
本発明は、ロボット(R)、医療ワークステーションおよび、対象物(P)の表面に画像(20)を投影する方法に関する。ロボット(R)はロボットアーム(A)と、ロボットアーム(A)に取り付けもしくはロボットアーム(A)に組み込まれて対象物(P)の表面に画像(20)を投影するための装置(18)とを備えている。  (もっと読む)
(もっと読む)
シーン内の物体の3D姿勢を求める方法及びシステム
【課題】本発明はシーン内の物体の3D姿勢を求める方法及びシステムを提供する。
【解決手段】深度エッジが、複数の物体を含むシーン内で照明が変化している間に、当該シーンから取得された1セットの画像から求められる。輪郭を形成するために深度エッジは連結される。輪郭に従って、画像は複数の領域に分割される。それらの領域を使用して遮蔽グラフが構築される。遮蔽グラフは、シーン内の遮蔽されていない物体の遮蔽されていない領域を表すソースノードを含む。遮蔽されていない物体に関連付けられる輪郭は、物体の1セットのシルエットと比較され、当該1セットのシルエットにおいて各シルエットは既知の姿勢を有する。最良に一致するシルエットの既知の姿勢が、遮蔽されていない物体の姿勢として選択される。
(もっと読む)
121 - 140 / 242
[ Back to top ]