
Fターム[5B057CD20]の内容
Fターム[5B057CD20]に分類される特許
401 - 416 / 416
画像生成方法および装置

【課題】 暗所の撮影や夜間撮影時に視点変換画像の合成対象撮像手段が撮像する際に効率的に必要な補助光を照射でき、認識度の高い視点変換画像を生成する。
【解決手段】 車両に配置された1又は複数の撮像手段から供給される画像情報に基づいて視点変換画像を生成する画像生成装置である。前記撮像手段による撮像領域を照射する補助光源を備え、この補助光源を視点変換画像毎に切り替えて使用する補助光源を選択する制御手段を設けた。
(もっと読む)
運転支援装置

【課題】 自車両周辺の状態をユーザにわかりやすく提示できる運転支援装置を提供する。
【解決手段】 車両の周囲の全方位を分担して広角撮影するように配置された複数のカメラ101〜104と、複数のカメラで広角撮影することにより得られた複数の広角画像を歪みのない複数の平面画像に変換するパノラマ変換部11と、パノラマ変換部で変換することにより得られた複数の平面画像の視差に基づき被写体までの距離を反映した視差画像を生成する視差計測部12と、視差計測部で生成された視差画像に基づき車両およびその周囲を上空から見た空間地図を生成する空間地図生成部13と、空間地図生成部で生成された空間地図を表示する表示部21、22とを備えている。
(もっと読む)
周辺監視装置および俯瞰画像表示方法
【課題】移動体の周囲の死角となるエリアの画像を、運転者側へ目視可能に提供することにより、より安全運転に寄与し得る周辺監視装置を提供すること。
【解決手段】移動体周辺監視装置30は、移動体31に搭載され、移動体周辺の魚眼画像を入力する魚眼カメラ36と、この魚眼カメラ36により得られた魚眼画像の少なくとも一部に関し、正規化パラメータを用いて、前記魚眼カメラ36が搭載された位置における正規化された2次元画像に変換する較正処理部51と、2次元画像を用いて、前記移動体31を俯瞰する仮想位置からみた移動体31およびその周辺を表す俯瞰画像を求めるための変換パラメータを算出する手段と、この手段により求められた変換パラメータおよび前記正規化変換パラメータを用いて、前記俯瞰画像の各画素に対応する位置データを前記魚眼画像から順次取出すことにより俯瞰画像を作成する画像作成手段37と、この手段37により作成された俯瞰画像を表示する表示装置42とを備える。
(もっと読む)
画像生成方法および装置
【課題】 撮像手段配置物体自体の変化を視点変換画像に反映させ、これによって監視対象の周辺状況との関係での危険性などの表示を画面に表示させ、撮像手段配置物体自体の変化に伴って表示している視点変換画像では見難くなってしまうことを防止する。
【解決手段】 撮像手段配置物体の周辺を撮像する1または複数の撮像手段によって撮影された撮影情報によって視点変換画像を生成する画像生成方法である。撮像手段配置物体モデルを前記視点変換画像に同時表示すると共に、撮像手段配置物体の可動部材の変化を検出して前記視点変換画像中の撮像手段配置物体モデルの該当部位を変形表示させる。また、撮像手段配置物体モデルを前記視点変換画像に同時表示すると共に、撮像手段配置物体の可動部材の変化量に応じて前記視点変換画像の仮想視点位置を変化させて表示させるようにする。
(もっと読む)
物体検出装置
【課題】 演算量を低減する物体検出装置を提供することを課題とする。
【解決手段】 互いに視点の異なる複数の撮像画像を出力する撮像手段と、互いに視点の異なる画像間の対応付けを行う対応付手段とを備え、対応付けによって得られる視差から物体を検出する物体検出装置において、撮像画像を低解像度画像に変換する解像度変換手段と、画像上における撮像手段からの距離に応じて遠方側と近傍側の少なくとも2つの領域に画像を分割する画像分割手段と、分割した領域毎に画像上における撮像手段からの距離に基づいて高解像度画像における対応付けを行うか否かを判定する判定手段とを備え、対応付手段により各領域の低解像度画像における対応付けを行い、判定手段により高解像度画像における対応付けを行うと判定した領域に対しては低解像度画像における対応付けによって得られた視差に基づいて対応付けを行う探索領域を設定して対応付けを行うことを特徴とする。
(もっと読む)
画像重ね合せ装置
【課題】 容易に、誤差が少なく重ね合わせることが出来る画像重ね合せ装置を実現する。
【解決手段】 脳機能測定装置と医用画像装置の測定画像結果とを重ね合わせる画像重ね合せ装置において、
頭部形状を測定する三次元デジタイザと、前記脳機能測定装置と三次元デジタイザとの相対位置測定信号を用い脳機能測定装置の信号と三次元デジタイザの信号を互いの対応する座標系信号に変換する信号変換式を求める第1の変換演算回路と、前記三次元デジタイザの測定信号と対応する位置の前記医用画像装置からの測定信号を用い前記三次元デジタイザの信号と医用画像装置の信号を互いの対応する座標系信号に変換する信号変換式を求める第2の変換演算回路と、前記第1,第2の変換演算回路の変換式を用い前記脳機能測定装置の信号と医用画像装置の信号を互いの対応する座標系信号に変換する信号変換式を求める第3の変換演算回路とを具備したことを特徴とする画像重ね合せ装置である。
(もっと読む)
2次元コード読取装置および2次元コードの読取方法
【課題】 安価で広域な検出範囲を持つ2次元コード読取装置を提供する。
【解決手段】 固定部2と、ラインセンサ7を設けた回転部5とからなり、モータ3により回転部5を回転させた状態でラインセンサ7の受光部を2次元コードに対向させる。主制御部9は、ラインセンサ7から出力される画像データを光通信素子12b、16bを介して入力し、その画像データをラインセンサ7の回転角度に応じて再配置処理して2次元コードの画像データを作成しデコードする。
(もっと読む)
薬物動力学的画像レジストレーション
非常に多くの場合、画像レジストレーションは、手動で実行されなければならない退屈な作業であった。本発明の1つの実施例によれば、画像時系列のレジストレーションは、薬物動態学的モデルに基づいて関心領域の代替変換列が互いに比較される、薬物動態学的モデルに基づいて実行され、最高の変換ベクトル列は、画像レジストレーションのために用いられる。有利なことに、これは、たとえ解剖学的コントラストが全く又はほとんどない場合でも、臓器運動の効果的な補償を可能にすることができる。  (もっと読む)
(もっと読む)
画像処理装置及び方法
画像処理装置及び方法は、画像フレームで例えば線分などの関心領域22aを識別する。望ましくは、関心領域は、最適合境界ボックス23aを決定するために使用される進路境界ボックス21aの範囲内に定められる。次に、最適合境界ボックス23aは直交グリッド25aへ再走査される。従って、線分22aは、2次元配列によって表され、線分22aの全長は第1の次元にあり、線分22aの左側及び/又は右側の画素データは2次元にある。次に、直交グリッド25aは、例えばラインデータの補間、増強、エッジ検出といった画素並列処理のために、SIMD処理装置26によって処理される。線分22aは、その全長が1つの次元で検出されるように再走査されたので、画像データは、SIMD処理装置26によるライン領域に基づく処理により適する。望ましくは、第1の次元は画像内の行に対応し、第2の次元は画像内の列に対応する。画素データがSIMD処理装置により処理されると、再走査動作中に記憶された走査情報は、画像データを元の画像フレームへと逆に走査するために使用される。  (もっと読む)
(もっと読む)
データ処理装置、データ処理方法、及びデータ処理プログラム
【課題】 構造物のひび割れや浮き、空洞等の変状部の有無及び位置を容易且つ安価に特定することを可能とし、また、当該変状部の経年変化をも容易且つ安価に把握することを可能とする。
【解決手段】 データ処理装置は、寸法情報を有する線図情報からなるCAD図面データを入力するCAD図面データ入力部21と、画像データを入力する画像データ入力部22と、この画像データ入力部22によって入力された画像データ上における座標値を算出する座標算出部23と、画像データ入力部22によって入力された画像データ上の情報をCAD図面データ入力部21によって入力されたCAD図面データ上に写像する写像処理部24と、この写像処理部24によって作成された写像後のCAD図面データを含む各種データを出力するデータ出力部25とを備える。
(もっと読む)
ボリューム画像のパノラマビュー画像の作成システムおよび方法
対象のボリューム画像のパノラマ投影を作成するためのシステムおよび方法が開示されている。仮想カメラが当該対象内の立方体空間の中心に配置される。このカメラから取得された画像が単一平面上に投影される。前方の画像が、平面の中心にあるウインドウ内にマッピングされる。立方体空間の左方、右方、上方および下方の画像が、この矩形ウインドウの周囲に、左方、右方、上方および下方の画像が矩形ウインドウを取り囲む連続画像を形成するようにマッピングされる。  (もっと読む)
(もっと読む)
小型システム用のパノラマメーカーエンジン
パノラマ画像を生成するための方法は、第1画像を受け取る段階と、第1画像を第1部分と第2部分に分割する段階と、第1画像の第1部分を回転させる段階と、第1画像の回転した第1部分を不揮発性メモリに保存する段階と、第2画像を受け取る段階と、第2画像を第3部分と第4部分に分割する段階と、第1画像の第2部分と第2画像の第3部分との間の重複領域を突き合わせる段階と、第1画像の第2部分と第2画像の第3部分を縫合して、第1縫合画像を形成する段階と、第1縫合画像を回転させる段階と、第1縫合画像を不揮発性メモリに保存する段階と、を含んでいる。 (もっと読む)
マイクロ流体装置用の画像処理方法およびシステム
マイクロ流体装置の画像を処理する方法である。この方法は、マイクロ流体装置の第1画像を受信する。第1画像は第1状態に関連している。さらに、この方法は、マイクロ流体装置の第2画像を受信する。第2画像は第2状態に関連している。さらに、この方法は、第1画像と第2画像を第3座標空間に変換する。さらに、この方法は、変換された第1画像と変換された第2画像に関連した情報に少なくとも基づいて第3画像を取得し、また、第1状態と第2状態に関連した情報を取得するべく第3画像を処理する。 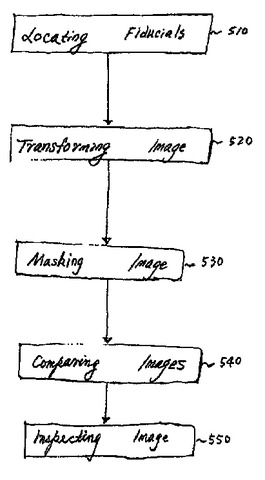 (もっと読む)
(もっと読む)
遠隔映像認識システム
【課題】 曲面像を高速に平面像に変換する方法に基づく遠隔映像認識システム及び受け手側による一ソース多画面という斬新な受像システムを提供する。
【解決手段】 遠隔映像認識システムは、CCD装置4と、CCD装置4で撮像された映像を伝送する手段5と、伝送された映像情報を受信して表示するコンピュータ装置7と、を備える。CCD装置4は、広視野角の魚眼レンズ1を備え、伝送手段5は、インターネット9で曲面画像をコンピュータ装置7に送信自在である。インターネット9にはサーバ10が接続され、該サーバ10のコンピュータ装置に、画像情報を平面画像に変換する手段を設ける。コンピュータ装置7は、サーバ10に接続し、変換された平面画像を受け取って出力する。尚、変換手段は、CCD装置4、伝手段5、コンピュータ装置7のいずれかに設ける。
(もっと読む)
画像処理装置
【課題】 撮像装置で撮像した画像データの色収差量を検出してその補正を行うことができる画像処理装置を提供する。
【解決手段】 本発明は、原画映像メモリ1と、原画映像読み出し部2と、原画像データの二次元座標の座標変換を行う座標変換部3と、色収差補正後の画像データを格納する結果映像メモリ4と、結果映像メモリ4に画像データを格納する制御を行う映像書き込み部5と、結果映像読み出し部6と、原画映像メモリ1内の画像データと結果映像メモリ4内の画像データとを比較して両データの差分を検出する比較部7と、差分を累積加算する積分カウンタ8と、コントローラ9とを備えている。撮像装置で撮像された画像データを構成する複数の色成分間のピクセル値の差分を検出し、差分の累積加算値が最小になるように一部の色成分の座標変換を行うため、撮影済みの画像データの色収差を精度よく補正することができる。
(もっと読む)
車両周辺監視装置及び方法
【課題】 視点位置をダイナミックに変更して、車内の表示装置に運転状況に応じて最適な合成画像を表示することができる車両周辺監視装置及び方法を提供する。
【解決手段】 本発明の車両周辺監視装置は、カメラ101と、アナログ・ディジタル変換器(A/D)102と、フレームメモリ103と、ディジタル・アナログ変換器(D/A)105と、液晶表示装置などのディスプレイ106と、歪み補正のための幾何学変換用テーブルを構成するROM化された変換テーブル107と、視点位置をダイナミックに変更しうるようにするために視点変換用パラメータを供給する視点変換用パラメータ供給手段108と、第1ステップとしてROM化された変換テーブル107に基づいて、各カメラから得られた画像の歪みを補正し、第2ステップとして視点変換用パラメータ供給手段108から供給される視点変換用パラメータに基づいて変換のためのアドレス計算等を高速に行うCPU又はDSP等から構成される画像合成手段104とから構成されている。
(もっと読む)
401 - 416 / 416
[ Back to top ]