
Fターム[5B057CD20]の内容
Fターム[5B057CD20]に分類される特許
1 - 20 / 416
運転支援装置
【課題】ドアの開放による自車の外形輪郭の変化にも対応可能で、運転者からの死角領域の発生も抑制される、俯瞰画像表示タイプの運転支援装置を提供する。
【解決手段】車両の周辺領域を撮影する車載カメラによって取得された撮影画像を上方仮想視点で射影変換することで撮影俯瞰画像を生成する俯瞰画像生成部と、車体を示す車体俯瞰画像を出力する車体画像出力部と、開放状態のドアを示すドア俯瞰画像における外側輪郭部以外の領域を透明化または半透明化した透明ドア俯瞰画像を出力するドア画像出力部と、撮影俯瞰画像と車体俯瞰画像と透明ドア俯瞰画像とが画像合成された運転支援画像をモニタ表示画像として生成する画像合成部とが備えられている。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法

【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
車両周辺監視装置
【課題】俯瞰画像上で全体が表示されていない目標物に対し、俯瞰画像上の境界線を変更し全体を表示できるようにした車両周辺監視装置を提供すること。
【解決手段】複数の撮像装置が互いに共通する視野領域とする俯瞰画像の共通領域に位置する障害物と判定された画像から抽出された複数の特徴点に対し、三次元計測処理部43において得られた相対運動情報による一定の経過時間を想定したときの予想軌跡と時刻変化をもとに、前記共通領域を互いに共通する視野領域とする各カメラについて“前記特徴点が写る/写らない”を予測しその予測結果を得る。そして、前記予測結果から、前記俯瞰画像の共通領域について、前記特徴点が抽出された障害物131をより広範囲に写すことの可能なカメラによる部分俯瞰画像を優先させ、フィードフォワード的に俯瞰画像の繋ぎ目、境界線を変更し、障害物131がより広範囲に俯瞰画像に表示されるようにする。
(もっと読む)
カメラ姿勢算出装置
【課題】複数台の監視カメラの監視空間が什器等が設置された建物内、或いは建物内の廊下などの場合、各カメラの姿勢を校正する基準物体を設置するスペースを確保できない。
【解決手段】自己及び相互の鉛直下を撮像可能に設置された2台のカメラ2a,2bのそれぞれの鉛直下にマーカー7a,7bを配置する。視線方向算出部30は、例えば、カメラ2aについて当該カメラで撮像した画像における自己マーカー7a及び他方カメラ鉛直下の相手マーカー7bの位置座標を用いて当該カメラから各マーカーへの視線方向を算出する。姿勢算出部31は、自己マーカーへの視線方向から得られる鉛直方向と、相手マーカーへの視線方向から得られるカメラ2a,2b間の方位とを用いて世界座標系における各カメラの姿勢を算出する。
(もっと読む)
レーザオルソ画像生成装置及びそのプログラム
【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】高い精度で移動体を検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】特徴点抽出部103は、撮像画像の各画素の画素値に基づいて複数の特徴点を抽出する。候補点特定部104は、抽出された特徴点から車両の所定部位の候補点を1又は複数特定する。透視投影変換部105は、特定された候補点を、透視投影変換行列を用いて3次元座標空間に逆投影する。3次元モデル配置部106は、逆投影された候補点に整合させて3次元モデルを配置する。透視投影変換部105は、配置された3次元モデルを撮像画像に投影する。移動体検出部107は、撮像画像へ投影された3次元モデルにより画定される領域内に含まれる特徴点の数に基づいて、車両を検出する。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置
【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
車両周辺監視装置
【課題】通常の俯瞰画像だけでなく、その部分拡大俯瞰画像もモニタ表示する際、それぞれの表示目的に適合した俯瞰画像が生成される車両周辺監視装置の提供。
【解決手段】車載カメラモジュールによって取得された撮影画像を元画像として二次平面射影変換によって第1俯瞰画像を生成する第1俯瞰画像生成部と、撮影画像を元画像として三次面射影変換によって第2俯瞰画像を生成する第2俯瞰画像生成部と、第1俯瞰画像からモニタ表示用の第1表示画像を生成するとともに、当該第1表示画像の所定領域に対応する第2俯瞰画像の所定領域から第1表示画像より大きな表示倍率を有するモニタ表示用の第2表示画像を生成する表示画像生成部とを備えている。
(もっと読む)
色変換装置、画像形成装置、色変換プログラム、画像形成プログラム、及び、色変換テーブル
【課題】人間の感覚に沿った的確な色変換や色調整を可能とし、従来の装置やシステムに対する整合性、互換性、親和性の向上を図る。
【解決手段】 RGBの3値で表現される入力デバイスと、CMYKの4値で表現される出力デバイス間において、入力デバイスのRGB値と出力デバイスのCMYK値との対応付けとしての格子点を、所定の無彩色軸から放射方向に均等に配置して放射状の色変換テーブルを生成する格子点配置部と、前記放射状の色変換テーブルの同一の色相面及びその補色色相面からなる色相層を色相順に積層して前記格子点が立方格子をなす立方格子型色変換テーブルを生成する色変換テーブル再編処理部と、を備える構成としてある。
(もっと読む)
画像認識装置、画像認識方法および画像認識プログラム
【課題】物体の認識を精度良く行うことができる画像認識装置を提供する。
【解決手段】画像認識装置1は、画像に対して3D解析手法による物体認識を行う3D解析手法による物体認識部13と、前記画像に対してパターン認識による物体認識を行うパターン認識による物体認識部14と、を備え、前記3D解析手法による物体認識部13により得られる3D解析手法による物体認識の結果と前記パターン認識による物体認識部14により得られるパターン認識による物体認識の結果に基づいて最終ターゲットの認識結果を得る、ことを特徴とする。
(もっと読む)
ステレオマッチング処理装置、ステレオマッチング処理方法、及び、プログラム
【課題】ステレオ画像から、同一の点を撮像している対応点を求めて、視差を算出する際において、処理の高速化を図り得る、ステレオマッチング処理装置、ステレオマッチング処理方法、及び、プログラムを提供する。
【解決手段】ステレオマッチング処理装置100は、ステレオ画像の互いに対応点の組を特定し、組毎に視差を算出する視差算出部30と、ステレオ画像を分割する画像分割部40と、分割部分毎に、当該部分中に存在する対応点の組を特定し、これについて算出された視差の値に基づいて、当該部分の視差の最大値と最小値とを特定して視差探索範囲を設定する視差探索範囲設定部50と、分割部分毎に、対応点の組を新たに複数特定し、新たに特定した各組について、視差を算出し、その値が当該部分の視差探索範囲に収まる場合に、算出した視差を、当該部分における新たに特定した当該組の視差として出力する視差算出部60と、を備えている。
(もっと読む)
画像処理装置、画像処理方法、プログラムおよび画像処理システム
【課題】広画角で撮影された3次元画像を平面画像に射影する画像処理装置、画像処理方法、プログラムおよび画像処理システムを提供すること。
【解決手段】本発明の画像処理装置は、3次元画像データを2次元平面画像データに射影する。画像処理装置100は、位置座標および画素値を伴う3次元画像データを蓄積する記憶装置124と、次に作成するべき2次元平面画像データとするための拡大または縮小のためのズーム・パラメータを含む表示パラメータを取得する表示データ取得部104と、表示パラメータを使用して3次元画像データの一部から2次元平面画像データを作成するための位置座標変換部106および画素値マッピング部108と、作成された2次元平面データを2次元画像として表示するディスプレイ装置112とを備え、2次元画像データ作成のために使用する位置座標の逆変換手段を切り替えている。
(もっと読む)
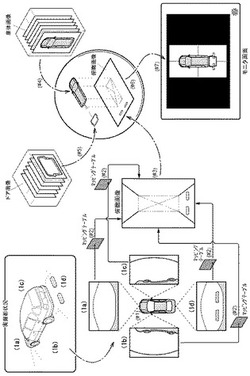
車両周辺監視システム
【課題】複数の撮影画像から生成される俯瞰画像の重複領域に現れる物体の撮影方向に関する運転者の理解を容易にする車両周辺監視システムの提供。
【解決手段】部分的に重複させた撮影による複数の撮影画像から生成された俯瞰画像セグメントを、互いの重複領域を重ね合わせるように組み合わせて表示用俯瞰画像を生成する。俯瞰画像における重複領域に重複する撮影画像の境界領域を表す境界指標を付与した境界付き俯瞰画像が表示された後に、俯瞰画像における重複領域に予め設定された融合関係で融合して得られた融合重複画像を用いた融合俯瞰画像が表示される。
(もっと読む)
関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラム
【課題】ノイズの影響等を軽減させて、ステレオペアの相関関数を精度良く算出することができる関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラムを提供する。
【解決手段】関数算出装置110は、参照視点画像及び複数の近傍視点画像を受信する正規化部111と、参照視点画像及び近傍視点画像をステレオペア毎に平行化する正規化部111と、平行化したステレオペアの視差を正規化する正規化部111と、視差を正規化したステレオペアの参照視点画像及び近傍視点画像に、マッチングウィンドウを定めるウィンドウ設定部112と、マッチングウィンドウ間の1次元POC関数を、視差を正規化したステレオペア毎に算出する関数算出部113と、1次元POC関数のうち、相関ピークの高さが閾値以上である1次元POC関数を統合する関数統合部114と、を備える。
(もっと読む)
画像処理方法、画像処理装置及びコンピュータプログラム
【課題】画像間の対応付けが困難な場合であっても、奥行き推定誤差を抑制し、高品質な仮想視点画像を合成すること。
【解決手段】複数の異なる視点から被写体を撮影した多視点画像に基づいて、任意の仮想視点位置から見た被写体の画像を合成する画像処理方法である。多視点画像に対して各画素の奥行きに対する尤度を算出し、尤度に基づいて個々の画素の奥行きを推定し、高精度推定画素の奥行き推定結果を用いて、画像特徴から奥行きに対する尤度を推定するための推定関数を算出し、補正対象画素に対して推定関数を用いて尤度の補正を行い、補正後の尤度を用いて画像全体の奥行きを再推定し、再推定した奥行きと、多視点画像とに基づいて、仮想視点位置に応じた被写体の画像を合成する。
(もっと読む)
駐車支援装置
【課題】自車両が移動しても駐車スペースが表示画面に表示される俯瞰映像をリアルタイムにユーザに提供すること。
【解決手段】駐車支援装置1は、車両を駐車させるための駐車目標位置を第1俯瞰映像より検出する駐車目標位置検出手段34と、視点位置を決定する視点位置決定手段34と、回転量を決定する回転量決定手段34と、視点位置と回転量とに基づいて第1俯瞰映像を回転させる視点変換テーブルを作成する視点変換テーブル作成手段35と、視点変換テーブルに基づいて第1俯瞰映像より第2俯瞰映像を生成する第2俯瞰映像生成手段36とを有する。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】自車両を駐車可能な駐車枠をユーザに適切に提示できる駐車支援装置を提供すること。
【解決手段】自車両周囲の画像から変換した俯瞰画像内に含まれる、路面上に描画された線状のロードマークを検出し、前記線状のロードマークが複数検出された場合に、複数の前記線状のロードマークのそれぞれについて、検出された他の線状のロードマークに対する平行度を算出し、前記平行度算出手段により算出された平行度が所定の閾値以上である場合に、前記俯瞰画像中に、自車両が駐車可能な駐車枠が存在していると判断する際において、前記線状のロードマークの前記俯瞰画像中における存在位置に応じて、前記閾値を変更する駐車支援装置。
(もっと読む)
道路標示認識装置及びその認識方法
【課題】道路標示を認識するために用いられる撮影装置のレンズに付着物が有る場合においても、付着物の影響を低減し、より正確で信頼性の高い道路標示認識を実現する。
【解決手段】撮影画像に複数の領域を設け、これら複数の領域から複数の鳥瞰画像を生成する。レンズに付着物がある場合、路面の状態に依存せず、常に鳥瞰画像上の同じ位置に付着物の影響が現れる。この特徴を利用すれば、レンズの付着物による影響を受けている領域を特定できる。従って、付着物による影響を受けている領域から生成される鳥瞰画像を、道路標示の認識に使用しないように除外することで、認識性能の低下や誤認識を防止し、より高い精度の道路標示の認識が可能となる。
(もっと読む)
入力画像における歪を検出する方法、入力画像における歪を検出する装置およびコンピューター読み取り可能な媒体
【課題】書物などのスキャン画像は背に近い所に歪みを有する。歪みを検出し、補正する方法を提供する。
【解決手段】特徴画像を用いてスキャンされた本の画像を分割化しページ領域に対応するピクセルをマップしページオブジェクトを作成してページの縁を検出する。ページオブジェクトの2つの間にある無地の背景領域を見つけ、ページ縁を分析してその形状を検出し、形状を分析して本の背の終端点を検出することにより本の背領域が検出される。ページ縁を用いて特徴画像を調べ、ピクセル値の上から下および下から上の下降勾配を検出し元のスキャンされた画像における影歪みの角を判定する。締め付けおよび湾曲歪みも検出される。ベジェ曲線を用いてページ上で検出された3つの歪みの各々をモデル化する。検出された歪みはまず台形の補正領域を定義することにより補正される。強度、締め付け、および湾曲補正が次に台形の補正領域内の線に沿って適用される。
(もっと読む)
車両のサラウンドビューシステム
【課題】車両のサラウンドビューシステムおよび車両のサラウンドビューを生成するための方法を提供すること。
【解決手段】上記車両のサラウンドビューシステムは、車両の異なる箇所において提供された複数の画像センサーであって、画像センサーは、車両の完全な周囲を覆う車両周囲の画像データを生成する、複数の画像センサーと、複数の画像センサーの画像データを処理する画像処理ユニットであって、画像処理ユニットは、異なる画像センサーの画像データに基づいて車両のサラウンドビューを生成するように構成され、サラウンドビューを生成するために、画像処理ユニットは、車両を囲むボウル上に画像データを逆に投影する、画像処理ユニットと、画像処理ユニットによって生成されたサラウンドビューを表示するディスプレイと、生成されたサラウンドビューが表示されるビューの位置および角度を変更するマニピュレーターとを含む。
(もっと読む)
1 - 20 / 416
[ Back to top ]