
Fターム[5B057CD20]の内容
Fターム[5B057CD20]に分類される特許
81 - 100 / 416
マルチスペクトルデータの幾何学的リファレンシング
センシングデバイスに対する相対運動における処理対象の領域の幾何学的リファレンスされたマルチスペクトル画像データを得るためのセンシングデバイスが説明される。センシングデバイスは、第1の2次元センサ素子及びスペクトルフィルタを備える。センシングデバイスは、センシングデバイスに対する処理対象の領域の上記相対運動の間に、後に続く複数のマルチスペクトル画像を得て従って第1のセンサの異なる複数の部分を用いて処理対象の異なる複数の部分に対するスペクトル的に区別できる情報を提供するように適合化される。センシングデバイスはまた第2の2次元センサ素子を備え、第2のセンサ素子を用いて、区別できるスペクトル情報に結合されるべき幾何学的リファレンシング情報を発生するために、処理対象の領域の画像を提供するように適合化される。センシングデバイスの第1のセンサ素子及び第2のセンサ素子は同一基板上に集積化される。 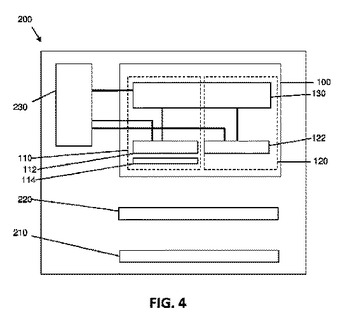 (もっと読む)
(もっと読む)
表情モニタリング方法および表情モニタリング装置

【課題】 撮影角度が異なる場合でも、顔の向きに影響されずに表情の変化を正しく評価することができる表情モニタリング方法を提供する
【解決手段】 ステレオカメラを用いて左右一対の顔画像を撮影する工程と、複数の計測点について左右の画像それぞれに定義される二次元座標系での二次元座標(xL,yL)、(xR,yR)を抽出して対応付けを行う計測点対応付け工程と、撮影空間に定義される三次元座標系での各計測点の三次元座標(Xp,Yp,Zp)を算出する三次元座標算出工程と、オイラー角による補正を行うことにより表情要素の画像を原点方向に向けたときの各計測点の補正三次元座標(X’p,Y’p,Z’p)を算出する補正三次元座標算出工程と、各計測点の補正二次元座標(X’p,Y’p)を算出する補正二次元座標変換工程と、フーリエ記述子を用いて定量的に表現する評価工程とからなる。
(もっと読む)
車両周辺画像提供装置

【課題】トップビュー画像のつなぎ目と交差するガイドラインを違和感なく表示させることが可能な「車両周辺画像提供装置」を提供すること。
【解決手段】車両周辺画像提供装置は、表示手段と、複数のカメラと、車両の画像のデータを予め格納する第1の記憶手段と、車両の幅及び車両からの所定の距離を示すガイドラインのデータを記憶する第2の記憶手段と、第1の記憶手段に格納されているデータから車両の画像と車両周辺の画像を合成して表示手段の画面に表示させるように制御する制御手段とを備える。制御手段は、各カメラにより取得された画像間の境界領域に表示されるつなぎ目と交差するガイドラインを表示するとき、ガイドラインの表示位置の画素と表示位置に隣接する画素との輝度差に応じて現れる滲みを含めたガイドラインの表示がつなぎ目の両側でずれのないようにガイドラインの表示位置を調整する。
(もっと読む)
障害物認識装置
【課題】障害物の影が路面に投影されていたとしても、自車両と障害物との距離を正確に認識できる技術を提供する。
【解決手段】自車両1に搭載され、自車両1周辺を撮影する単眼カメラ3により撮影された撮影画像が、水平な仮想面に射影した下面視の画像に変換手段6aにより変換されて、下面視の画像に含まれた障害物上面の端が検出手段6bにより検出されるため、障害物の影が路面に投影されていたとしても、検出手段6bにより検出された障害物上面の端を基準にして、自車両1と障害物との距離を正確に認識できる。
(もっと読む)
誤認識防止装置
【課題】車載カメラの撮影画像を処理するだけの安価な構成で、影と障害物とを区別し、誤認識を防止して障害物を認識できる技術を提供する。
【解決手段】取得手段6aにより取得された各フレームの撮影画像が変換手段6bにより上方視画像に射影変換されて、各フレームの上方視画像それぞれの略同じ路面領域の水平エッジヒストグラムのピーク形状に関する特徴が抽出手段6cにより抽出される。そして、各フレームの抽出された特徴が相似するか否かから同一領域の影と障害物とが区別され、誤認識が防止されて障害物が認識手段6dにより認識されるため、単眼カメラ3の撮影画像を処理するだけで、影と障害物とを区別し、誤認識を防止して障害物を認識できる。しかも、車載レーダなどの高価な測定機器を車両に搭載する必要がないため、安価な構成とすることができ、コストダウンを図ることができる。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】 対象物体の変形パラメータが未知の場合に、変形条件の違いによって生じる変形を高精度かつ高速に推定する仕組みを提供する。
【解決手段】 原画像を変形する情報処理装置であって、
原画像の変形による特徴領域の移動を前記変形と対応づけて変形規則を取得する取得手段と、
対象画像の特徴領域と対応する原画像の領域との位置情報を拘束条件として、前記変形規則に従って原画像を変形する変形手段と、
を有する。
(もっと読む)
画像変換装置及び操作支援システム
【課題】視点変換処理のリアルタイム性と装置の省リソース性とを両立させる画像変換装置を提供すること。
【解決手段】カメラ(2)が取得する原画像から視点変換画像を生成する画像変換装置(100)は、カメラ(2)の姿勢の変位を検出する姿勢変位検出部(3)と、原画像上の座標と視点変換画像上の座標とを対応付ける変換テーブル(40)を生成する変換テーブル生成手段(10)と、カメラ(2)の現在の姿勢に対する変位が所定条件を満たす姿勢のそれぞれに対応する変換テーブルを変換テーブル記憶部(4)に格納する変換テーブル格納手段(12)と、その所定条件を満たさない姿勢のそれぞれに対応する変換テーブルを変換テーブル記憶部(4)から消去する変換テーブル消去手段(13)と、カメラ(2)の姿勢の変位と変換テーブル(40)とを用いて原画像を視点変換する視点変換手段(14)と、を備える。
(もっと読む)
車両周辺監視装置
【課題】複数のカメラの撮影画像を俯瞰画像に変換し、立体物の歪が少ない俯瞰画像を表示することができる車両周囲監視装置を提供する。
【解決手段】本発明の車両周囲監視装置は、俯瞰画像生成部31が、複数のカメラ21により撮影された車両周囲の画像を俯瞰画像に変換し、合成領域選択部34は、状態情報取得部33からの自車両の位置や周辺環境情報に基づいて、俯瞰画像の合成に利用する領域を選択する。俯瞰画像合成部35は、合成領域選択部34の出力に基づいて、俯瞰画像を合成し、表示部40が俯瞰画像を表示する。
(もっと読む)
車両用障害物検出装置
【課題】カメラで撮影した複数の画像を用いて、障害物とそれ以外の領域を識別可能な俯瞰視点の状況図を自己生成する車両用障害物検出装置を提供する。
【解決手段】車両の周囲を撮影可能な撮像部と、撮像部で撮影した車両周辺の画像に含まれる障害物を検出する障害物検出部と、撮影部で撮影した車両周辺の画像を所定の仮想視点から見た俯瞰画像に変換して出力する俯瞰画像生成部と、俯瞰画像に含まれる障害物画像と障害物以外の画像とを識別可能な画像に変換し、車両の周辺の状況を表す俯瞰視点の状況図を作成する状況図生成部と、状況図を表示する表示部と、を具備する。
(もっと読む)
画像処理装置、画像処理方法及び車載カメラ装置
【課題】車載カメラ装置において、小規模な回路構成、低コストで、異なる変形画像間のマーカー(車幅線、距離線など)の対応点を自動的に演算する。
【解決手段】座標変換により入力画像を変形するための座標計算を行う座標計算手段を用いて、異なる変形画像間のマーカー位置の対応点を求める。例えば、魚眼画像に起因する画像の歪みを補正した変形画像(ノーマルモード)におけるマーカーの座標値を、視点変換により真上から見た変形画像(見下ろしモード)に反映させる場合、座標計算手段を用いて、ノーマルモードにおけるマーカーの座標値(B)を一度、画像変形前の魚眼画像における対応する座標値(A)に変換し、その後、この座標値(A)を見下ろしモードにおける対応する座標値(C)に変換する。
(もっと読む)
車両周辺監視装置および車両周辺監視方法
【課題】静止立体物と移動体とを区別して検出する。
【解決手段】車両周辺監視装置は、車両に取り付けられた撮像カメラと、撮像カメラからの撮像データを画像処理し特徴点を抽出する画像処理部210と、特徴点についての物体の判定を行う物体判定部220とを有する。画像処理部210は、撮像データの特徴点の動きベクトルを検出する第1の検出手段と、俯瞰画像に変換された特徴情報の動きベクトルを検出する第2の検出手段とを含む。物体判定部220は、第1の検出手段および第2の検出手段によって特徴点の動きベクトルが検出されたとき、当該特徴点を移動体と判定し、第1の検出手段によって特徴点の動きベクトルが検出されずかつ第2の検出手段によって特徴点の動きベクトルが検出されたとき、当該特徴点を静止立体物と判定し、第1の検出手段および第2の検出手段によって特徴点の動きベクトルが検出されないとき、当該特徴点を背景と判定する。
(もっと読む)
人数カウンタ
【課題】高精度な人物認識および人物追跡により精度よく人数をカウントできる。
【解決手段】画素ごとに、カメラから測定対象までの距離を計測する計測部106と、測定対象が接地する平面に画素を写像した場合の画素位置と距離とを関連付けた距離情報と、画素位置において平面に対して垂直な高さ方向の距離を示す距離情報とを含む3次元データを画素ごとに格納する格納部107と、3次元データから、閾値以内となる距離情報を含む3次元データのみ抽出してクラスタリングし、人候補領域をサンプリングフレームごとに得るクラスタリング部115と、サンプリングフレームごとに得られた複数の人候補領域間の相関値に基づいて同一の人候補領域を判定し、同一の人候補領域の移動軌跡を追跡する追跡部117と、人候補領域が予め人候補領域より大きく設定した画素領域を通過した場合に、その通過数を通過人数としてカウントするカウント部118と、を具備する。
(もっと読む)
車両用画像表示装置
【課題】車両が障害物に対して予め設定した距離以内に接近したときに、障害物を示す立体画像を飛び出し表示する車両用画像表示装置を提供する。
【解決手段】車両の周辺の映像を夫々撮影する複数のカメラを含む撮像部と、撮影した画像を用いて車両の背景画像及び車両の俯瞰画像を生成し、背景画像に俯瞰画像を合成する第1の画像生成部と、車両と障害物との相対距離が予め設定した距離以内に近付いたときに、撮像部で撮影した障害物の画像をもとに障害物を示す立体物画像とカメラから障害物を見たときの影に相当する影画像を生成し、立体物画像と影画像を含む立体画像を背景画像の表示面よりも車両の俯瞰画像側に表示するための第2の画像生成部と、第1の画像生成部と第2の画像生成部で生成した画像を合成して表示する表示部と、を具備する。
(もっと読む)
車両用死角映像表示システムと車両用死角映像表示方法
【課題】半透明車室内映像を透過して運転者の視点位置からの死角映像を見せるシステムであるとのユーザー理解を促すことで、死角解消による安全運転への寄与を、実効性を持たせて実現することができる車両用死角映像表示システムと車両用死角映像表示方法を提供すること。
【解決手段】サイドカメラ1と外部モニター2と画像処理コントロールユニット3と、を備えたシースルーサイドビューモニターシステムA1において、画像処理コントロールユニット3は、サイドカメラ1から入力される実カメラ映像信号を運転者の視点位置から見た死角画像に視点変換する周囲映像画像変形部33と、運転者の視点位置から見た車室内画像を形成する車体画像形成部34と、半透明車室内画像を透過して死角画像を見せる透過表示画像を生成する画像合成装置36と、車室内画像の中から次第に浮かび上がってくる死角画像を見せるアニメーション表示画像を生成する画像合成装置36と、を有する。
(もっと読む)
画像処理装置
【課題】画像の変動量を高精度に算出可能な超解像処理を用いた画像処理装置を提供する。
【解決手段】同一の対象物を撮像した複数の低解像度画像を入力する撮像画像入力部と、複数の低解像度画像から基準フレームを選択する基準フレーム選択部と、基準フレームに対する他の参照フレームの変動量を算出する画像変動量算出部と、算出した変動量に基づいて複数の低解像度画像を合成し高解像度画像を生成する画像合成部とを備え、画像変動量算出部は、基準フレーム上の特徴点の追跡処理を行い、4つ以上の特徴点からなる初期特徴点集合から平面射影変換行列を算出し、この平面射影変換行列に適合する特徴点を探索して同一平面上特徴点集合を生成し、基準フレーム上の異なる平面毎の特徴点集合から各参照フレームの各画素が最も適合する特徴点集合を選択し、選択した特徴点集合から得られる射影変換行列を用いて基準フレームと各参照フレームとのずれ量を算出する。
(もっと読む)
車両用画像表示装置及び俯瞰画像の表示方法
【課題】限られた表示サイズの中で車両の動作に応じた最適な俯瞰画像を効率よく表示できるようにする。
【解決手段】コントローラ10が自車の動作状態を示す車両信号(ギア位置信号、舵角信号、車速信号、駐車支援開始信号)を入力し、入力した車両信号に応じてトップビュー画像としてディスプレイ2に表示する自車周囲の表示対象領域を変更する。
(もっと読む)
画像処理装置及びこれを備えた画像形成装置
【課題】印刷デバイスが現状で出力可能な最大濃度で出力した各パッチの読取を行い、現状の色域を把握し、適切な階調表現がなされる色変換処理を行う。
【解決手段】画像処理装置は、第1色空間信号を第2色空間信号に変換する第1色空間変換部と、色変換テーブルに基づき第2色空間信号を印刷デバイスに従属する色空間信号に変換する第2色空間変換部と、印刷デバイスが出力したC、M、Y、Kのベタ濃度を測る濃度測定部と、各パッチの濃度の係数を求める制御部と、複数種の色変換テーブルを記憶するメモリと、色変換テーブルは、各パッチの係数の組み合わせに応じ、第2色空間での入力デバイスの色域を全体的に圧縮又は拡大し、入力デバイスの色域が、印刷デバイスが出力可能な色域内に収まるように定められ、第2色空間変換部は、各パッチの係数の組み合わせに一致する色変換テーブルを用い色変換処理を行う。
(もっと読む)
車両周辺画像提供装置
【課題】カメラ画像の重複領域の範囲で障害物が検出された場合でもその障害物を正確に表示することが可能な「車両周辺画像提供装置」を提供すること。
【解決手段】車両周辺画像提供装置は、表示手段と、車両周辺の画像を取得可能に設置された複数のカメラと、車両の画像のデータを予め格納すると共に、撮像手段により取得された画像のデータを逐次格納する記憶手段と、記憶手段に格納されているデータから車両の画像と車両周辺の画像を合成して表示手段の画面に表示させるように制御する制御手段と、を備える。制御手段は、各画像のうち隣接する2つの画像の重複領域の範囲に障害物を検出したとき、各カメラのオートホワイトバランスの設定位置を重複領域に指定して各画像を取得する。
(もっと読む)
画像処理装置および方法
【課題】ドライブレコーダの撮像画像を表示装置に表示させる画像処理装置において、動体の動きを使用者が容易に理解できるようにする。
【解決手段】ドライブレコーダからの時系列のステレオ撮像画像から、3次元位置情報算出部11が3次元位置情報を算出し、動体抽出部12aが同一の動体を抽出する一方、面設定部13からは、使用者が表示にあたって所望とする投影面、すなわち視線方向を設定し、これに応じて3次元位置情報統合部15が、その設定された投影面での時系列画像を統合し、3次元位置情報算出部16が、その統合した画面における動体の各位置を算出し、3次元位置情報投影部14が表示装置3に表示させる。したがって、時系列の3次元撮像画像から解析した動体の動きを、運転者の目線や、事故の目撃者の目線から見た画像に変換して表示することができ、前記動体の動きを使用者が容易に理解することができる。
(もっと読む)
車両周辺表示装置
【課題】
表示を切り替えることなく、一般色覚者及び色弱者の双方が車両からの距離感
を確実に掴むことができる周辺表示装置を提供する。
【解決手段】 本発明の車両周辺表示装置1は、カメラ17により撮影された車両周辺の映像と、車両から所定距離離間した位置を示す距離目安線22を、車内に設けられた表示器13に重畳して表示する。距離目安線22は、距離目安線本体22aと、距離目安線本体22aに沿って表示される付加部22b、22cとを備えている。
(もっと読む)
81 - 100 / 416
[ Back to top ]