
Fターム[5B057CD20]の内容
Fターム[5B057CD20]に分類される特許
121 - 140 / 416
画像処理装置および方法並びにプログラム
【課題】計算負荷を軽減しつつ、特定の被写体の輪郭が不自然に変形されてしまうことを防止する。
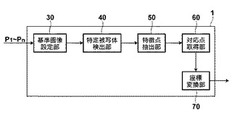
【解決手段】基準画像設定部30が複数の画像において基準となる基準画像を設定し、特定被写体検出部40が、基準画像から特定の被写体を検出し、特徴点抽出部50が特定の被写体の輪郭近傍領域が他の領域よりも特徴点の平均密度が高くなるように、基準画像における複数の特徴点を抽出し、対応点取得部60が他の画像における、特徴点抽出部50により抽出された各特徴点に対応する対応点を取得し、座標変換部70が各特徴点の位置と、その各特徴点に対応する対応点の位置が一致するように、基準画像および/または他の画像の各画素の位置を座標変換する。
(もっと読む)
車載用表示システム及び表示方法

【課題】仮想先行車両像等の表示を任意の奥行き位置に高い位置精度で知覚させる単眼視の車載用表示システム及び表示方法を提供する。
【解決手段】車両の進路前方に関する情報である前方情報を取得する前方情報取得部と、前記車両に搭乗する観視者の片目の位置を検出する位置検出部と、前記前方情報取得部によって取得された前方情報に基づいて、前記車両の幅及び高さの少なくともいずれかに対応した大きさを有する第1仮想画像を、前記進路前方の景色内の対応する位置に生成し、前記生成した前記第1仮想画像を有する映像を含む光束を、前記検出された前記片目の位置に基づいて前記観視者の前記片目に向けて投影する映像投影部と、を備えたことを特徴とする車載用表示システムが提供される。
(もっと読む)
画像変換装置および画像変換方法
【課題】 全方位ミラーを用いた撮影により得られたミラー歪曲円形画像の一部分を切り出して、平面正則画像に変換する処理を効率的に行う。
【解決手段】 座標C(a,b)と座標S(x,y)との対応関係を示す第1の座標関係式を用いて、全方位ミラー式カメラで撮影したミラー歪曲円形画像Cを、全方位ミラーの代わりに魚眼レンズを用いて撮影した場合に得られるであろうと考えられる仮想のレンズ歪曲円形画像Sに一旦変換する。続いて、座標S(x,y)と座標T(u,v)との対応関係を示す第2の座標関係式を用いて、仮想のレンズ歪曲円形画像Sを、更に平面正則画像Tに変換する。後者の変換プロセスは、魚眼レンズを用いた撮影により得られた実レンズ歪曲円形画像を平面正則画像に変換するプロセスと共通のプロセスになる。
(もっと読む)
画像処理装置
【課題】画像に基づいて所定の条件を満たした物体を検出する画像処理装置において、侵入物を効果的に検知し、誤検出を低減する。
【解決手段】画像処理装置では、第1のライン設定手段が、ユーザにより行われる操作に応じて、処理対象となる画像に対して、第1のラインA1、A2を設定する。第2のライン設定手段が、第1のライン設定手段により設定された第1のラインに応じてそれとは離隔した第2のラインB1、B2−1、B2−2を前記処理対象となる画像に対して設定する。物体検出手段が、第1のライン設定手段により設定された第1のラインを横切るとともに第2のライン設定手段により設定された第2のラインを横切った物体を検出する。
(もっと読む)
画像処理装置およびこれを用いたリヤビューカメラシステム
【課題】乗員に違和感を与えることなく、かつ、車両後方の奥行き方向全体の状況を認識し易くすることができる画像処理装置を提供する。
【解決手段】車両(A)に搭載された障害物検出手段9が車両(A)から所定距離内で障害物を検出したときは、リヤビューカメラ1により撮像された画像に対して画像処理部3が俯瞰変換処理を行い、俯瞰画像をモニタ5に表示させ、一方、障害物検出手段9が車両(A)から所定距離内で障害物を検出しないときは、リヤビューの画像をモニタ5に表示させる。
(もっと読む)
目標特徴線特定装置、情報出力装置、目標特徴線特定方法、及び目標特徴線特定処理プログラム
【課題】目標となる目標特徴線を正確に特定することを可能とした目標特徴線特定装置、情報出力装置、目標特徴線特定方法、及び目標特徴線特定処理プログラムを提供する。
【解決手段】本発明は、画像のデータを入力する入力手段と、入力された画像中における複数の特徴点を抽出する特徴点抽出手段と、前記画像中における複数の特徴線を抽出する特徴線抽出手段と、前記抽出された複数の特徴線のうちから、所定長以上の長さを有する特徴線であり、且つ、所定数以上の前記特徴点と重なる又は隣り合う特徴線を、目標となる目標特徴線として特定する目標特徴線特定手段と、前記特定された目標特徴線を示す目標特徴線データを記憶する目標特徴線データ記憶手段と、を備える。
(もっと読む)
車両周囲監視装置及び車両周囲監視方法
【課題】運転者が車両周囲の立体物の配置関係をより正確に認識することができる車両周囲監視装置及び車両周囲監視方法を提供すること。
【解決手段】車両周囲監視装置100は、車両周囲に存在する立体物を検出する立体物検出部430と、複数のカメラ200の撮影画像を合成処理して、車両周囲の俯瞰画像を表す合成俯瞰画像を生成し、前記立体物検出部による検出結果に基づき、生成した合成俯瞰画像に映る立体物の方向を、前記合成処理の境界方向側に変更する合成俯瞰画像生成部440とを備える。
(もっと読む)
人物検出装置及びプログラム
【課題】人物の検出の精度を向上させることができる人物検出装置及びプログラムを提供することを目的とする。
【解決手段】入力画像から抽出したウインドウ画像を左右の領域に分割して左半分画像及び右半分画像を生成し、左半分画像と左半分画像用の学習モデルとの比較、右半分画像と右半分画像用の学習モデルとの比較、全体画像と全体画像用の学習モデルとの比較を行い、左半分画像、右半分画像、及び全体画像のいずれか1つの画像が人物であると判定された場合に、ウインドウ画像が人物であると判定することにより、入力画像から人物を検出する。
(もっと読む)
駐車支援装置
【課題】ユーザがジョイスティック等の遠隔操作手段を用いて、容易に目標駐車位置を設定することが可能な駐車支援装置を提供する。
【解決手段】目標駐車枠により目標駐車位置を設定し、該設定された目標駐車位置に車両を駐車させるための支援を行う駐車支援装置であって、車両周辺の撮像画像上に重畳表示されたポインタを遠隔から操作するための遠隔操作手段と、遠隔操作手段を用いてユーザから入力された座標位置に目標駐車枠を直接移動させる直接移動手段と、遠隔操作手段を用いて撮像画像上に重畳表示された方向ボタンをユーザが選択することにより、該選択された方向ボタンに関連付けられた方向に目標駐車枠を移動させる方向移動手段と、遠隔操作手段の操作によって、直接移動手段による直接移動モードと方向移動手段による方向移動モードとを切替える切替え手段と、目標駐車位置に車両を自動誘導させる制御手段とを備える。
(もっと読む)
画像処理システム、画像処理装置、収差補正方法及びプログラム
【課題】
収差に起因した結像位置のずれの補正に際して画素の座標変換に用いるテーブル(座標変換前後の位置の対応関係を保持)のサイズを小さくしても、座標変換誤差を低減させられるようにした技術を提供する。
【解決手段】
画像の画素を座標変換することによって光学系で生じる収差を補正する画像処理システムであって、座標変換前後の画素の位置の対応関係を保持するテーブルを有し、当該テーブルから変換対象となる代表点の座標に対応する変換後の座標を取得し、当該取得した代表点間の画素の変換後の座標をラグランジュ補間式を用いた補間演算によって算出する。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】車両の切り返し位置にずれが生じた場合であっても、車両を駐車目標位置へと正確に移動させることができる駐車支援装置及び駐車支援方法を提供する。
【解決手段】切り返し動作を行うのに最適な位置として算出した推奨切り返し位置とは異なる位置で切り返し動作が行われた場合に、切り返し動作が行われた実切り返し位置から駐車目標位置に到達する第2駐車経路を算出し、この第2駐車経路を自車周囲の俯瞰画像上に描画した表示画像を表示する。
(もっと読む)
車両用画像処理装置
【課題】対象物に対する距離及び向きにかかわらず、演算負荷を増大させることなく、確実に対象物を認識することが可能な車両用画像処理装置を提供する。
【解決手段】時刻t1,t2にフレーム画像A1,A2を撮像する外界カメラ2と、標識20に対する運動量及び距離を算出するカメラ運動推定部34と、画像A1から基本テンプレートを作成するテンプレート作成部35と、画像A1を画像A2へ画像変換するための変換行列を算出する画像変換パラメータ算出部36と、基本テンプレートを変換行列で変形して変形テンプレートを作成するテンプレート変換部38と、変形テンプレートで画像A2のテンプレートマッチング処理を行い、標識20検出するテンプレートマッチング処理部32を備え、変換行列は、運動量の大きさ及び距離に応じて、相似変換行列,アフィン変換行列,および射影変換行列の中から選択される。
(もっと読む)
車載用画像処理装置及びその画像処理方法
【課題】小さい回路規模で、補正性能をあまり劣化させることなく、運転者が十分に見易い仮想視点画像を生成する。具体的には、魚眼画像を路面に引かれた駐車枠が直線的かつ平行に近い状態に見える画像に変換する。
【解決手段】画像処理装置120は、車両100に取り付けられた撮像装置110で撮像された路面上の車両の周囲の画像を、該撮像装置の視点と異なる視点(仮想視点)からみた仮想視点画像に変換する仮想視点変換手段を有する。この仮想視点変換手段は、撮像装置で撮像された魚眼画像について、そのX座標のみの座標変換を行って、無消失点状の仮想視点画像を生成する。
(もっと読む)
道路境界検出判断装置
【課題】環境変化に強く、遠方の立体物で区切られた道路境界も検出可能な道路境界検出判断装置を提供すること。
【解決手段】道路領域を撮像する2台以上のカメラを有する画像取得部と、画像取得部によって得られた画像に基づいて撮像領域の3次元距離情報を取得する距離データ取得部と、距離データ取得部によって得られた3次元距離情報に基づいて道路領域に存在する立体物の高さを検出して道路境界を検出する道路境界検出部と、道路境界に相当する立体物の高さを検出できた第1の道路領域と、道路境界に相当する立体物の高さを検出できなかった第2の道路領域について、画像を変換して第1の道路領域の境界に相当する立体物及び第2の道路領域の境界に相当する立体物が同じであるか否かを判断する同一境界判断部を備え、第1及び第2の道路領域の境界に相当する立体物が同じであると判断した場合には、前記第2の道路領域を第1の道路領域に再設定すること。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】歪曲収差補正処理を実行する際に画像中の被写体の顔が欠けたり、顔が検出できなくなることを防ぐ画像処理技術の実現。
【解決手段】画像処理装置は、画像データの外縁の形状変化を伴う画像処理を行う画像処理手段と、画像データに含まれる顔領域を検出する顔検出手段と、前記画像処理の前後の画像データに関する顔検出結果を比較する比較手段と、前記比較手段による比較結果に応じて、前記画像処理のパラメータを変更するパラメータ変更手段と、を有する。
(もっと読む)
赤外線カメラ調整方法及び赤外線カメラ調整器具
【課題】赤外線カメラ内のパラメータ、または、複数の赤外線カメラ間の関係を表すカメラ間パラメータ、あるいは、これらを同時に計測する場合のいずれにおいても有効に用いることができる赤外線カメラ調整方法を提供する。
【解決手段】中乃至遠赤外線の反射率が50%未満である輻射材料からなる輻射面1aと中乃至遠赤外線の反射率が50%以上である反射材料からなる平滑面である反射面1bとが表面部に存在しこれら2つの面1a,1bが所定の模様を構成して配置されているターゲットボード1を用いて、赤外線カメラ3の写角内にターゲットボード1を配置し、赤外線カメラ3により撮影される反射面1bには水平線よりも上方が反射されるとともに地上の物体が映り込まない状態とし、赤外線カメラ3により撮影されるターゲットボード1上の所定の模様に基づいて、赤外線カメラ3の位置、または、方向の調整を行う。
(もっと読む)
シミュレーション装置の画像データ生成装置
【課題】設計時間を長くすることなく、納品先の工場と類似する環境をシミュレーション装置に再現可能にする。
【解決手段】本発明のシミュレーション装置の画像データ生成装置は、現実の工場においてカメラで撮影して得られた複数の2次元撮影画像を、その撮影角度データと共にシミュレーション装置に入力する手段と、検査対象のワークの3次元データを入力する手段と、複数の2次元撮影画像の中から、検査カメラの撮影角度と一致する撮影角度データを有する2次元撮影画像を選択して背景画像とする手段と、検査カメラの光軸に対して背景画像の平面が直交するように設定する手段と、背景画像上にワークを重ねて配置したものを検査カメラにより撮影して得られる画像を計算により求め、この求めた画像を検査カメラ画像として出力する手段とを備えている。
(もっと読む)
写真画像処理方法、写真画像処理装置、及び事象推定方法
【課題】入出力の直積空間内で学習サンプルから推定した共分散行列を用いて、マハラノビス汎距離を最小化する出力を求める写像演算を用いることにより、欠損画像の高精度な修復等が可能な写真画像処理方法及び写真画像処理装置を提供する。
【解決手段】写真画像を構成する各画素データを成分とする複数のベクトル画像を学習サンプルとして入力する第一ステップと、入出力の直積空間内で学習サンプルから共分散行列を推定する第二ステップと、推定された共分散行列の固有値問題を解くことにより得られる正規直交基底が張る部分空間と、入力された処理対象ベクトル画像に直交する出力超平面の双方に含まれ、且つ、最小マハラノビス汎距離を与える直積空間内の点を求める第三ステップと、求められた点から処理対象ベクトル画像に対応する出力を求める第四ステップとを備えた写真処理方法。
(もっと読む)
画像生成装置、方法及びプログラム
【課題】光線空間を構築するために、実際に撮影された画像内の対応画素を簡易にかつ精度良く見つけて、補間画像を生成する画像生成装置を提供する。
【解決手段】画像生成装置は、指定された視点における生成画像を生成するため、2つの画像の各画素の光線空間及び実空間での位置情報、光線空間における一点の分布、及び、前記指定された視点に基づき、生成画像の画素に対応する、前記2つの画像の画素を求める交点検出手段と、求めた画素を中心とした所定範囲において、所定の画素サイズのブロックによるブロック・マッチングを適用し、対応するブロックを求める対応点検出手段と、求めた対応ブロックの中心にある画素に基づき、生成画像の画素値を決定する画素値算出手段とを備えている。
(もっと読む)
広角センサーアレイモジュール、並びにそのイメージキャリブレーション方法、動作方法、及びアプリケーション
【課題】複数のイメージを組み合わせて1つの広角イメージを作成する方法、広角センサーアレイモジュールのイメージキャリブレーション方法、動作方法、及びアプリケーション提供する。
【解決手段】第1のイメージセンサーS1と、第2のイメージセンサーS2と、第1のイメージセンサーS1と第2のイメージセンサーS2との間の相対的な空間関係に従って得られる少なくとも1つの変換マトリクスを記憶する記憶ユニット22と、プロセッサ21とを有し、プロセッサ21は、第1のイメージ及び第2のイメージを変換マトリクスを用いて組み合わせ、合成イメージを作製する。
(もっと読む)
121 - 140 / 416
[ Back to top ]