
Fターム[5B057CD20]の内容
Fターム[5B057CD20]に分類される特許
41 - 60 / 416
画像処理装置、撮像装置およびプログラム
【課題】 演算負荷を抑制しつつも複数画像間の位置ズレ検出を比較的精度よく行う技術を提供する。
【解決手段】 画像処理装置は、第1画像および第2画像を取得する取得部と、位置ズレ演算部とを備える。位置ズレ演算部は、第1画像および第2画像の位置ズレを、対称行列である高次の逆行列を用いた第1幾何変換モデルで求める。そして、位置ズレ演算部は、各々が逆行列よりも低次の正方行列をなすように逆行列を複数に等分割し、複数の正方行列の組み合わせで第1幾何変換モデルの演算を行う。
(もっと読む)
駐車枠検出装置及び駐車枠検出方法

【課題】駐車枠検出装置及び駐車枠検出方法において、俯瞰変換後の画像分解能に影響されずに、元の画像分解能でエッジを扱うことにある。
【解決手段】制御手段(11)は、撮像手段(9)により撮像された後方画像からエッジを抽出するエッジ抽出部(13)と、エッジ抽出部(13)によりエッジを抽出された画像を俯瞰画像に変換してこの変換時に俯瞰画像上の各エッジ点に対応するエッジ抽出画像上のエッジ点の個数を記録する俯瞰画像変換部(14)と、俯瞰画像変換部(14)により変換された俯瞰画像からρ−θ空間への投票値としてエッジ点の個数を用いてハフ変換により直線を検出する直線検出部(15)と、直線検出部(15)により検出された直線が駐車枠の線であるか否かを判定する駐車枠判定部(16)とを備える。
(もっと読む)
道路認識装置及び道路認識方法
【課題】道路標示の認識率を向上させることができる道路認識装置及び道路認識方法を提供すること。
【解決手段】本発明にかかる道路認識装置100は、画像変換部101、画像重ね合わせ部103、画像認識処理部105を備える。画像変換部101は、車両の移動中に複数のタイミングで車載カメラ90により撮像された道路面の複数のカメラ画像を複数の鳥瞰画像に変換する。画像重ね合わせ部103は、複数の鳥瞰画像の位置合わせをするとともに、複数の鳥瞰画像の一部の領域を重ね合わせ、当該重ね合わせた領域において、それぞれの鳥瞰画像の画素値を加算して合成鳥瞰画像を生成する。画像認識処理部105は、合成鳥瞰画像に基づいて、道路面に表示された道路標示を認識する。
(もっと読む)
半導体集積回路及び全周囲映像システム
【課題】複数台のカメラでの撮影による画像データを半導体メモリへ格納する場合のバス負荷を軽減する。
【解決手段】半導体集積回路(10)は、複数のカメラ(31〜34)と半導体メモリ(35)とが接続可能に構成される。この半導体集積回路は、複数の第1インタフェース(11〜14)と、第2インタフェース(21)と、バス(22)と、複数の画像処理モジュール(15〜18)を含む。そして上記画像処理モジュールは、予め指定された領域内の画像データについて歪み補正を行い、その歪み補正後の上記領域内の画像データを、上記バス及び上記第2インタフェースを介して上記半導体メモリに書き込む処理を含む。予め指定された領域以外の画像データを、上記画像処理モジュールでの歪み補正対象から外すことにより、半導体メモリに転送される画像データの量を削減する。
(もっと読む)
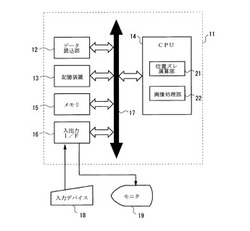
撮像装置
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
コミュニケーション装置、コミュニケーション方法、及びプログラム
【課題】映像中の対話相手との距離を任意に制御し、人間の視覚特性を考慮して、2次元ディスプレイ上の対話相手のサイズを、表現したい距離に応じて変換可能とする。
【解決手段】画像取得部1−aは、対話相手の2次元映像(画像)を撮影する。距離測定部1−bは、カメラから対話相手までの距離を測定する。人物画像サイズ算出部1−cは、画像取得部1−aからの入力である人物画像の実寸サイズを算出する。画像変換部1−dは、ユーザAが映像中の人物がどれ位離れていると感じるか、すなわち、ユーザAから映像中のユーザBまでの知覚距離を任意に制御するために、画像サイズを変換した対話相手の画像を生成する。映像表示部1−eは、画像変換部1−dで生成された表示画像を表示する。
(もっと読む)
駐車枠検出装置及び駐車枠検出方法
【課題】この発明は、駐車枠の線の左右両端の候補となる直線を精度良く検出でき、無関係な直線を駐車枠の線の両端と誤検出することを防止でき、駐車枠を精度良く検出することを目的としている。
【解決手段】この発明は、車両後方を撮像する撮像手段と、撮像した後方画像からエッジを抽出するエッジ抽出手段と、エッジを抽出された画像を俯瞰画像に変換する画像変換手段と、変換された俯瞰画像を左右の領域に分割する領域分割手段と、分割された左右領域からハフ変換により領域毎にそれぞれ直線を検出する直線検出手段と、検出された直線が幅を有する線の端であるか否かを判定する第1の判定手段と、幅を有する線の端であると判定された複数の直線から左右の領域毎に2本の直線の組合せをつくり、この組合せが幅を有する線の両端であるか否かを判定する第2の判定手段とを備えることを特徴とする。
(もっと読む)
画像処理装置、画像表示システム及び画像表示方法
【課題】画角が狭い画像を取得するための専用のカメラがなくても、合成画像と画角が狭い画像とのいずれも生成する。
【解決手段】画像表示システムの画像処理回路3においては、画像合成部32が、複数の撮影画像P1〜P4に基づいて、仮想視点からみた車両9の周辺の領域を示す合成画像CPを生成する。一方で、歪補正部33が、複数の撮影画像P1〜P4のうちの一の撮影画像P4の一部の領域の歪みを補正して、一の撮影画像P4より画角が狭い歪補正画像RPを生成する。このため、画角が狭い画像を取得するための専用のカメラがなくても、合成画像と画角が狭い歪補正画像とのいずれも生成することができる。
(もっと読む)
画像処理装置、及び、画像処理方法
【課題】ユーザが車両を一旦停車させた後に後進させながらハンドルを操舵して駐車させる縦列駐車をする場合に、車両を適切な位置に一旦停車させることによって適切な駐車をさせることができる技術を提供する。
【解決手段】画像処理装置は、表示画像において、車両が縦列駐車される場合の駐車開始位置において車両の側面と他の物体との間隔として必要な間隔を示す指標を表示画像に重畳してディスプレイへ表示させるため、ユーザは車両を縦列駐車させる際に、ディスプレイへ表示された表示画像の指標を参考にすれば駐車開始位置において車両の側面と他の物体との間隔として必要な間隔をとることができ、車両を適切に縦列駐車させることができる。
(もっと読む)
電子アルバム生成装置および立体画像貼り付け装置ならびにそれらの動作制御方法およびそれらのプログラム
【目的】電子アルバムのページごとに立体画像が見やすくなるようにする。
【構成】電子アルバム構成するページが選択される(ステップ61)。立体画像が選択され,選択された立体画像が画像合成領域に貼り付けられる(ステップ63)。画像合成領域には視差量が規定されており,立体画像が貼り付けられた画像合成領域の視差量が読み取られる(ステップ64)。立体画像の視差量が画像合成領域の視差量に変更させられる(ステップ65)。
(もっと読む)
対応付け装置
【課題】画像情報と地図情報との対応付けを正確に行うことができる対応付け装置を提供する。
【解決手段】画像が入力される画像入力部101と、地図が入力される地図入力部102と、前記画像上の点と前記地図上の点との対応関係を示す対応点情報を入力する対応入力部103と、前記対応点情報に基づいて、前記画像の分割領域毎に変換パラメータを算出する算出部105と、前記分割領域毎の前記変換パラメータを用いて、前記画像上の所定の位置を前記地図上の位置に変換する変換部107とを有する。
(もっと読む)
画像変換装置、画像処理装置、ならびに、画像処理システム
【課題】商品の全周囲画像列を、ユーザが容易に撮影できるようにする。
【解決手段】商品撮影装置121において、画像センサ部201は、商品が配置された外界から投射された光を感知して、当該感知の結果を表す画像を出力する。指示受付部202は、ユーザからの撮影指示を受け付ける。撮影指示が受け付けられると、保存部203は、画像センサ部201により感知されている画像を保存する。ファインダ表示部204は、保存部203により保存された画像と、画像センサ部201により感知されている画像と、を、合成してファインダ画面に表示する。
(もっと読む)
マスク画像作成システム
【課題】多関節型ロボットにより移動されるカメラの視点に応じて柔軟にマスク画像を作成するとともに、マスク画像を作成する手間を減らすことのできるマスク画像作成システムを提供する。
【解決手段】マスク画像作成システムは、複数の関節を有するアーム21を動作させる多関節型ロボット20と、アーム21に設けられてアーム21の動作により移動されるとともに、ワークWを撮像して実画像を取得するCCDカメラ28と、画像処理装置10とを備える。画像処理装置10は、アーム21の位置及び方向に基づいて、カメラ28の位置及び方向を算出し、ワークWの形状を表す3次元データ、ワークWの位置及び方向、並びにカメラ28の位置及び方向に基づいて、カメラ28によりワークWを撮像したと仮想した場合の仮想画像を取得する。そして、この仮想画像に基づいて、カメラ28により取得される実画像の一部をマスキングするマスク画像を作成する。
(もっと読む)
環境における3次元(3D)オブジェクトの3D姿勢を求めるための方法
【課題】カメラによって前記環境から捕捉した画像から特徴を抽出することによって、環境における3次元(3D)オブジェクトの3D姿勢が求められる。
【解決手段】前記特徴を前記環境の3Dモデルにマッチングして、対応を求める。前記対応を用いて、前記画像のカメラ基準系および前記環境のワールド基準系を対応する中間カメラ基準系および対応する中間ワールド基準系に変換する。前記中間カメラ基準系および前記中間ワールド基準系に幾何学的制約を適用して、制約付き中間ワールド基準系および制約付きワールド基準系を取得する。次に、前記制約付き中間ワールド基準系および前記制約付きワールド基準系のパラメーターから前記3D姿勢を求める。
(もっと読む)
物体形状生成装置及び方法
【課題】3次元モデルを入力データとして取得できる距離画像から自動的に生成する。
【解決手段】本実施形態によれば、物体形状生成装置は、画像入力装置と、形状抽出部と、接続情報算出部と、画像処理部を備えた構成である。画像入力装置は、対象物体の複数の距離画像を取得する。形状抽出部は、前記各距離画像を使用して、前記対象物体を構成する各部分の形状情報を抽出する。接続情報算出部は、前記各部分の相対位置及び角度を表す座標情報を含む接続情報を取得する。画像処理部は、前記形状情報及び前記接続情報に基づいて、前記対象物体の3次元モデルを生成する。
(もっと読む)
駐車支援装置
【課題】撮影画像に含まれる駐車枠を高精度に検出することができる技術を提供する。
【解決手段】算出手段による投票数の和が最も大きなθの組における複数の点(図4中の△、○で示される点)について、ρθ空間のρにより表される距離lが各仕切線SL間の距離と同一を示す点の組が駐車枠Pとして検出手段により検出されることで、上方視画像に含まれる所定以上の長さを有する直線を示すエッジのうち、駐車枠を形成する直線Lおよび仕切線SLとは異なる直線を示すエッジを形成する各画素について、前記θの組と異なるθ座標上の点(図4中の×で示される点)に投票が行われることにより検出される直線が、駐車枠であると誤って検出されることが防止されるので、撮影画像に含まれる駐車枠を高精度に検出することができる。
(もっと読む)
位置姿勢計測装置、その処理方法及びプログラム
【課題】2次元画像上における画像特徴と3次元形状モデルを構成する幾何特徴とを対応付け、その結果に基づいて物体の位置及び姿勢の計測を行なう。
【解決手段】位置姿勢計測装置は、3次元形状モデルを保持するモデル保持手段と、物体の位置及び姿勢を示す概略値を取得する手段と、撮像装置により撮像された物体の2次元画像を取得する手段と、概略値に基づいて3次元形状モデルにおける幾何特徴を2次元画像上に投影し、当該2次元画像上に投影された3次元形状モデルの幾何特徴の方向を算出する手段と、2次元画像から画像特徴の方向を算出する手段と、算出された画像特徴の方向と、3次元形状モデルから算出された幾何特徴の方向とを比較することにより、画像特徴と幾何特徴とを対応付ける手段と、当該対応付けられた画像特徴と幾何特徴とにおける距離に基づいて概略値を補正することにより物体の位置及び姿勢を算出する位置姿勢算出手段とを具備する。
(もっと読む)
画像処理装置及びその制御方法
【課題】立体映像に対して、立体感の低減やちらつきの発生が抑制された局所γ補正処理を行うことのできる技術を提供する。
【解決手段】本発明の画像処理装置は、左目用画像と右目用画像の組からなる立体映像において、左目用画像及び右目用画像のうち、一方の画像である第1画像と、他方の画像である第2画像の階調を補正する画像処理装置であって、前記第1画像と第2画像の間の視差を検出する検出手段と、前記第1画像と前記第2画像のそれぞれの画素毎に、当該画素の階調値を補正するために、対応する階調変換曲線を決定して階調値を補正する補正手段と、を有し、前記補正手段は、前記視差に基づいて前記第1画像の画素に対応する前記第2画像の画素を検出し、前記第1画像の画素と当該画素に対応する前記第2画像の画素に対して、同じ階調変換曲線を用いて階調値を補正することを特徴とする。
(もっと読む)
視点変換装置及び視点変換方法
【課題】視点変換のための演算処理速度が高速であり、また、視点変換途中に映像をメモリに保持する必要をなくす。
【解決手段】変換パラメータ演算部106は、カメラパラメータと仮想カメラパラメータとに基づいて、カメラ101により実視点から見た画像平面上の画像座標で表される第1の点から所定の基準平面上の点への投影を表す第1の式と、基準平面上の点から仮想撮像装置から見た画像座標で表される第2の点への投影を表す第2の式とを求め、更に第1及び第2の式により第1の点から第2の点への投影を表す第3の式を求め、その第3の式からカメラ101の撮像映像信号を仮想カメラの仮想撮像映像信号へ変換するための変換行列を演算する。視点変換部103は、カメラ101の撮像映像信号に対して、上記変換行列を用いた視点変換のための演算処理を行う。
(もっと読む)
画像処理装置、画像処理方法、及び、画像処理プログラム
【課題】画像レジストレーションの処理速度を向上する画像処理装置を提供する。
【解決手段】参照画像と浮動画像との位置を合わせる画像処理システムであって、前記画像処理システムは、前記参照画像の画素値の1次元のヒストグラムを生成し、前記生成された参照画像のヒストグラムの各ビンに属する画素の位置を記憶装置に格納する第1の手段と、所定の幾何変換情報に従って浮動画像の座標を変換し、前記生成された参照画像のヒストグラムの一つのビンに属する参照画像の画素の位置に対応する前記変換された浮動画像の画素の画素値の頻度を示す、浮動画像の1次元ヒストグラムを、ローカルメモリ上に生成する処理を実行する第2の手段と、前記生成された浮動画像の1次元ヒストグラムを合成することによって、前記浮動画像の2次元の結合ヒストグラムを生成する第3の手段と、を備える。
(もっと読む)
41 - 60 / 416
[ Back to top ]