
Fターム[5B057CE09]の内容
画像処理 (340,757) | 処理部 画像基本処理 (31,097) | 切出 (1,911)
Fターム[5B057CE09]に分類される特許
241 - 260 / 1,911
移動体の前方への飛出し物体の検出方法及びその装置
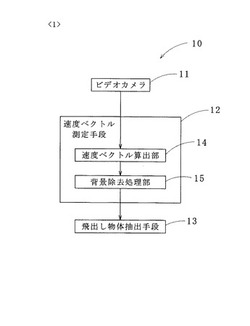
【課題】移動体のカメラで撮影した前方映像に画像相関法を適用して、移動体の前方に飛び出す物体の飛出し速度ベクトルを瞬時に捉えてリアルタイムで飛出し物体を検出することが可能な移動体の前方への飛出し物体の検出方法及びその装置を提供する。
【解決手段】移動体のカメラ11で移動体の前方映像を撮影し、前方映像を構成する連続画像の先画像内に順次設定する相関領域と相関性の高い領域を後画像内で探索して各相関領域の移動場所とする画像相関法を適用して相関領域の速度ベクトルをそれぞれ求め、速度ベクトルの中から前方映像の左右端部のいずれか一方より前方映像の左右方向の中心に向かう飛出し速度ベクトルを抽出して飛出し物体と認識する移動体の前方への飛出し物体の抽出方法であって、相関領域を先画像の左側一部領域及び右側一部領域に設定し、相関領域と相関性の高い領域を後画像の左側一部領域及び右側一部領域でそれぞれ探索する。
(もっと読む)
画像作成装置および方法、並びにプログラム

【課題】写真シールの作成作業、および作成された写真シールに対する利用者の満足度を向上させる。
【解決手段】表示制御部235は、複数の利用者を被写体として撮影された撮影画像を動画像としてリアルタイムで表示部に表示させるように制御し、合成処理部231は、表示部に表示された動画像における被写体それぞれに合成用画像を合成し、動画像における被写体それぞれが所定の位置関係になったときに、動画像における被写体全体に、被写体それぞれに合成された合成用画像とは異なる1つの全体合成用画像を合成する。そして、全体合成用画像が合成された、静止画像としての撮影画像が出力される。本発明は、例えば、写真シール作成装置に適用することができる。
(もっと読む)
3次元形状取得装置および3次元形状取得プログラム
【課題】複数の画像から高い精度で奥行き情報を生成する3次元形状取得装置および3次元形状取得プログラムを提供する。
【解決手段】3次元形状取得装置は、基準画像および参照画像からブロック画像を、それぞれ基準ブロック画像および参照ブロック画像として切り出すブロック画像切出手段と、基準ブロック画像における所定の色を基準色として特定し、基準ブロック画像および参照ブロック画像において、基準色に所定の範囲内で類似する色の画素を対象領域として抽出する対象領域抽出手段と、基準ブロック画像における所定の色を対象領域の背景をマスクする置換色として特定し、基準ブロック画像および参照ブロック画像において、対象領域に含まれない画素の色を置換色で置き換える色置換手段と、位相限定相関法により視差を計測する視差計測手段と、視差計測手段が計測した視差から3次元座標位置を生成する3次元座標位置生成手段とを備えることを特徴とする。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】不正流通コンテンツに基づいて発生元を検証可能とする構成を提供する。
【解決手段】コンテンツの区分データであるブロックに電子透かしデータを埋め込んだ複数の電子透かし記録ブロックを組み合わせて、クライアントに対する配信処理単位で異なる電子透かしデータ列を設定したコンテンツを生成してクライアントに提供する。クライアントに提供されるコンテンツの電子透かしデータ列は、配信処理単位の固有識別子である固有IDと、固有IDに対する改ざん検証値(MAC)と、(固有ID+MAC)に対するエラー訂正コード(ECC)を含む設定とする。不正流通コンテンツを解析して電子透かしデータ列を読み出して固有IDを取得し配信元を判定することを可能とした。
(もっと読む)
画像処理装置,画像形成装置
【課題】1つの原稿を分割して出力し,裏写りの部分をなくすように修正する場合でも,画質の低下を防ぐことが出来る画像処理装置及び画像形成装置を提供すること。
【解決手段】読み取り原稿を分割して画像処理する場合に,原稿全体を読み込んで検出された原稿全体についての濃度の頻度分布を検出し,上記検出された原稿全体についての濃度の頻度分布に基づいて,高頻度濃度色とこれに近い準高頻度の濃度色を抽出し,原稿全体について前記準高頻度濃度色の部分の濃度データを前記高頻度濃度色の部分の濃度データに変換した統一変換画像を作成し,この作成された統一変換画像について分割した分割画像を生成する画像処理装置。
(もっと読む)
画像処理装置、及び物体検出装置
【課題】画像監視において太陽光の照射領域に出現する影を物体像の変化領域と区別する。
【解決手段】対象空間の背景が撮影された背景画像30を記憶する。光領域検出部41は、予め定められた輝度閾値に基づいて、背景画像30における光領域31を検出する。参照影領域設定部420は、光領域31の外側に参照影領域320を設定する。参照影特徴抽出部421は、参照影領域320における背景画像30の画像特徴に基づいて参照影特徴321を抽出する。影領域検出部44は、入力画像において光領域31の内側から参照影特徴321を有する部分を影領域として検出する。
(もっと読む)
処理装置及び処理方法
【課題】印刷出力画像に地紋画像が付加されて印刷が行われる場合において、地紋画像と印刷出力画像の重なりに関して地紋画像の適切な適用を可能とする。
【解決手段】地紋パターン適用レイヤー決定処理(S3301)は地紋パターンと原稿データにおける原稿内容とが重なる面積に基づき、地紋パターンの印刷を透かし印刷または重ね印刷に決定する。この決定に応じて、透かし地紋印刷時の地紋パターン描画を行い(S3303)、または、重ね地紋印刷時の地紋パターン描画を行う(S3306)。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
情報処理装置及びその制御方法、プログラム
【課題】 自己オクルージョンが存在する環境においても、複数の撮影画像を用いて3次元空間内の対象物体の位置姿勢を高精度かつ安定的に推定するための技術を提供する。
【解決手段】 3次元空間内の対象物体の位置姿勢を推定する情報処理装置であって、複数の撮影位置から対象物体を撮影して得られた複数の撮影画像を入力する入力手段と、入力された複数の撮影画像の各々から、3次元空間内の所定の部分空間が占める領域に対応する部分画像を切り出す切出手段と、複数の撮影画像からそれぞれ切り出された複数の部分画像の特徴を示す特徴情報を、当該複数の部分画像から抽出する抽出手段と、物体の位置姿勢と、当該位置姿勢に対応する当該物体の特徴情報とを関連づけて示す辞書情報を記憶する記憶手段と、抽出手段が抽出した対象物体の特徴情報と、辞書情報に示される特徴情報とを比較して、該対象物体の位置姿勢を推定する推定手段とを備える。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
画像処理システム及び画像処理方法
【課題】 監視画像を処理する画像処理システムにおいて、差分画像(異物画像)の影領域をリアルタイムで推定して異物画像から除去する。
【解決手段】 電子カメラ1に太陽と空が映るように鏡3を設置し、カラーチャートと空を同時に撮影する。撮影したカラーチャートの日向、日陰輝度値から、その時の空の輝度値毎に日向と日陰の関係を示す実験式を得る。得た実験式に基づき空の輝度値毎の、日向と日陰の輝度値からなる輝度値データテーブルを作成する。作成された輝度値データテーブルの日陰の輝度値に基づき撮影画像の日陰の輝度値を推定し、撮影画像領域から日陰の領域を削除する。
(もっと読む)
印刷装置、レイアウト調整方法、プログラム、および、記録媒体
【課題】大量の画像データの中から利用したい画像データを選択して、アルバム(画像)
を容易に作成する技術を提供する。
【解決手段】印刷装置100は、画像データを入力する画像入力手段と、印刷対象の画像
データと、当該画像データについての付帯情報と、のレイアウトを決定するレイアウト決
定手段と、画像データの撮影日時に基づいて、画像入力手段で入力された画像データから
、印刷対象の画像データを抽出する画像データ抽出手段と、画像データ抽出手段で抽出さ
れた画像データを、レイアウト決定手段で決定されたレイアウトに割り当てる画像割当手
段と、レイアウトに割り当てられた画像データについて、最も出現頻度の高い色を判定す
る画像色彩判定手段と、画像色彩判定手段で判定された色に応じて、前記付帯情報の色を
調節する付帯情報調節手段と、を備える。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および電子装置
【課題】肌領域を精度良く検出する。
【解決手段】発光装置21は、第1の波長の光および第2の波長の光を被写体に照射し、カメラ22は、第1の波長の光を受光する第1の受光素子と、第2の波長の光を受光する第2の受光素子とを少なくとも有する画像センサを内蔵し、画像センサに入射される、第1および第2の波長の光が被写体に照射されているときの被写体からの反射光に基づいて第1のモザイク画像を生成し、生成した第1のモザイク画像を構成する各画素において、第1の受光素子に対応する画素の画素値に基づく第1の補間処理により得られる第1の画像、および第2の受光素子に対応する画素の画素値に基づく第2の補間処理より得られる第2の画像を生成する。そして、画像処理装置23は、第1および第2の画像に基づいて肌領域を検出する。本発明は、例えば撮像により得られる画像から、人間の肌を表す肌領域を抽出するコンピュータ等に適用できる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】特徴画像が埋め込まれた画像を印刷する際に、自機の状態等に応じて適切な態様で印刷を行うことが可能な画像処理装置を提供する。
【解決手段】特徴画像が埋め込まれた画像と自機の状態とに基づき、当該画像を印刷する際に当該画像を加工する必要があるか否かを判断する第1の判断手段と、第1の判断手段によって判断された加工を回避する条件を判断する第2の判断手段と、を有する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】背景から検出対象物を精度よく検出することが可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること
【解決手段】本発明の画像処理装置は、エッジ検出処理部12と、細分領域設定部13と、エッジ成分指標値算出部14と、検出対象物判定部15とを具備する。
エッジ検出処理部12は、検出対象物の像が部分的に含まれる検出対象画像に、エッジ検出処理を施してエッジ画像を生成する。細分領域設定部13は、エッジ画像を細分領域に区画する。エッジ成分指標値算出部14は、各細分領域に含まれるエッジ成分の量を示すエッジ成分指標値を、各細分領域毎に算出する。検出対象物判定部15は、エッジ成分指標値と閾値とを比較して、各細分領域毎に検出対象物の有無を判定する。
この画像処理装置は、検出対象画像にエッジ検出処理を施すことにより輝度を二値化し、背景との輝度差が小さい検出対象物であっても検出することが可能である。
(もっと読む)
風景画像合成装置、風景画像合成方法及び風景画像合成プログラム
【課題】走行途上の視覚的な有益情報を運転手に提供すること。
【解決手段】第1の車10の車載カメラ11aで撮影された第1の風景画像を入力し、第2の車20の車載カメラ21aで撮影された第2の風景画像を無線通信ネットワーク700を介して受信して、第1の風景画像の一領域と第2の風景画像の一領域とを比較して類似度が最も高い領域を特定し、その特定領域でそれら2枚の風景画像を重ね合わせて、重ね合わされた合成風景画像を表示する。
(もっと読む)
画像処理装置、撮像装置および画像処理プログラム
【課題】様々な撮像条件にて画像の十分な高精細化を行える画像処理装置を提供する。
【解決手段】画像処理装置110は、撮像系100,102により生成された入力画像を、撮像系の応答関数を用いて得られる評価値に差を持つ複数の領域に分割する領域分割手段1105と、該各領域に対して、該領域ごとに異なる応答関数を用いた画像精細度を増加させるための画像処理を行う処理手段1104とを有する。処理手段は、撮像系における該入力画像の生成時の撮像条件に対応する応答関数であって、記憶手段から読み出した、または演算により生成した応答関数を用いて画像処理を行う
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】簡単な構成により撮影画像に応じたトライマップを作成できるようにする。
【解決手段】被写体の撮影画像を示す画像データを取得する取得する。そして、画像から特定の被写体を切り出すためのトライマップフレームを記憶する記憶手段からトライマップフレームを選択する。そして、前記画像データに基づいてコントラストの分布を示すコントラストマップを作成し、前記作成されたコントラストマップに基づいて、前記選択されたトライマップフレームを修正し、前記撮影画像のトライマップを作成する。
(もっと読む)
画像処理システム、符号化システム、画像処理プログラムおよび符号化プログラム
【課題】低解像度であっても、後に高画質で高解像度の画像を生成することができる画像を生成することができるようにした画像処理システムを提供する。
【解決手段】画像処理システムは、ベクタ識別手段が第1のベクタ・データと第2のベクタ・データとが同等であるか否かを識別し、位相量算出手段が前記ベクタ識別手段により同等であると識別された場合に、前記第2のベクタ・データをラスタ・データに変換する際に前記第1のベクタ・データをラスタ・データに変換する際の位相と異なる位相となる位相量を算出し、ベクタ変換手段が前記位相量算出手段により算出された位相量に応じて、前記第2のベクタ・データをラスタ・データに変換する。
(もっと読む)
平面図生成装置及び平面図生成方法
【課題】車載カメラ画像及び路側カメラ画像に基づいて平面図を生成する場合に、高精度の平面図を生成することができる平面図生成装置及び平面図生成方法を提供すること。
【解決手段】位置/向き推定部111が、車載カメラ画像の内の道路領域画像を除く背景領域画像を平面変換することにより生成された第1の垂直平面画像と、路側カメラ画像の内の道路領域画像を除く背景領域画像を平面変換することにより生成された第2の垂直平面画像とに基づいて、車載装置100が搭載されている車両の位置及び向きを推定し、パラメータ調整部112が、推定された位置及び向きに基づいて、平面変換で用いられるパラメータを調整し、水平平面画像生成部113が、車載カメラ画像の内の道路領域画像を、パラメータ調整部112で調整されたパラメータを用いて平面変換することにより、水平平面画像を生成する。
(もっと読む)
241 - 260 / 1,911
[ Back to top ]