
Fターム[5B057CE09]の内容
画像処理 (340,757) | 処理部 画像基本処理 (31,097) | 切出 (1,911)
Fターム[5B057CE09]に分類される特許
181 - 200 / 1,911
撮像装置
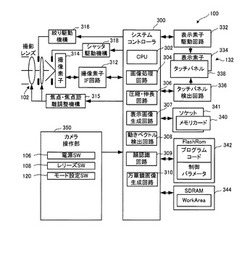
【課題】ユーザに興趣を与える画像をライブビュー表示する撮像装置を提供する。
【解決手段】画像データの一部から万華鏡状画像データを生成する万華鏡状画像生成部(310)を備え、制御部(300)は、ライブビュー表示において、被写体検出部が被写体を検出したときに、当該被写体を用いて生成した万華鏡状画像をライブビュー表示と共に表示部(132)に表示する第1表示モードと、前記被写体検出部が被写体を検出しないときに、万華鏡状画像を表示部(132)に表示しない第2表示モードと、を切り換える。
(もっと読む)
画像処理装置、画像処理方法、画像処理装置の制御プログラム、および当該プログラムを記録したコンピュータ読み取り可能な記録媒体

【課題】簡易な構成により、画像の一部または全部の鮮明度を低減する(ぼかす)処理を行う画像処理装置を実現する。
【解決手段】画像処理装置101は、距離画像センサ107が撮像した物体までの距離が画素毎に記録されている距離画像データを構成する画素の画素値を画素毎に取得し、該取得した画素値を画素毎に所定閾値と比較する距離画像データ解析部104と、当該比較の結果、距離が所定閾値を超えると判定された画素に対応する、カメラ106が撮像した撮像画像データを構成する画素の画素値に対して、所定演算を行う画像処理部103とを備える。
(もっと読む)
試着システム
【課題】顧客が実際の衣料品を着用したイメージを捉え易くする。
【解決手段】実施形態の試着システムは、撮影手段と、選択手段と、判別手段と、表示手段と、を備える。前記撮影手段は、衣料品を試着する人物の動画像を撮影する。前記選択手段は、衣料品データを選択する。前記判別手段は、前記撮影手段により動画像を撮影した人物の向きを判別する。前記表示手段は、前記選択手段により選択された衣料品データを元に、前記判別手段により判別された向きと同じ向きに向けた場合の衣料品画像を前記撮影手段により撮影した人物の動画像に重ね合わせた合成画像を表示する。
(もっと読む)
被写体領域特定方法、被写体領域特定装置及びプログラム
【課題】被写体領域の特定を簡便に、且つ、適正に行う。
【解決手段】背景と被写体とが存在する被写体存在画像から被写体が含まれる被写体領域を特定して抽出するサーバ3であって、所定の表示領域に表示される被写体存在画像にて、任意に境界線を指定する境界線指定部305と、境界線により区分される複数の区分領域から、各区分領域の縁部を構成する被写体存在画像の画像境界の画素数が、当該縁部の全画素数に対して所定の割合以上となる領域を特定する領域特定部308と、特定された領域を基準として、被写体存在画像における複数の区分領域の中から被写体領域を特定する被写体抽出部309とを備えている。
(もっと読む)
画像結合装置、画像結合方法、画像入出力システム、プログラム、及び記録媒体
【課題】複数の撮像素子部で撮像された複数の被撮像領域の画像を高速かつ高精度に結合する画像結合装置、画像結合方法、及び画像入出力システムを提供する。
【解決手段】画像結合装置は、「画像N」内にマッチング領域M1を設定し、マッチング領域M1内にエッジ検出領域を設定し、「画像N+1」内に複数の被マッチング領域を設定し、被マッチング領域M2を副走査方向に非線形に拡大又は縮小して、マッチング領域M1と副走査方向DYについて同じ大きさにしたときの、マッチング領域M1の画像と、拡大又は縮小された被マッチング領域M2の画像の各々との相関度を示す値により、マッチング領域M1と最も相関の高い被マッチング領域M2を選択し、最も相関の高い被マッチング領域M2を非線形拡大縮小手段によって拡大又は縮小する際の「画像N+1」のリサンプリング位置を、マッチング領域M1の画像と結合する結合位置として特定する。
(もっと読む)
測定対象物計数器および測定対象物を計数するための方法
【課題】本発明は、測定対象物計数器および測定対象物を計数するための方法に関する。
【解決手段】本方法は、所定の計数ビューの移動する画像を表す画像を取り込むステップと、所定の計数ビューの移動する画像内の移動領域を検出するステップと、移動領域の動きの速度を指し示す移動領域速度値を計算するステップと、所定の計数境界や、移動領域速度値や、寄与時間間隔dtに基づいて寄与ゾーンを繰り返して規定するステップと、規定した寄与ゾーン内に含有される移動領域の面積のサイズを表すサブ面積値を繰り返して取り出し、記録するステップと、複数の記録したサブ面積値を足し算することによって合計面積値を生成するステップと、合計面積値を基準測定対象物面積値で割り算することによって計数境界を通過した測定対象物の数を推定するステップとを備え、前記寄与時間間隔が、サブ面積値を取り出す2つの連続した行為間の時間間隔に対応する。
(もっと読む)
画像処理装置および撮像装置並びに画像処理方法
【課題】所望の被写体が中央に配置されたパノラマ画像を生成することが可能な画像処理装置および撮像装置並びに画像処理方法を提供する。
【解決手段】画像処理装置は、パノラマ撮影の対象となる撮影視野の中央から一方の端までを確定するための情報を収集する情報収集部と、前記撮影視野に含まれる複数の部分視野に対応する画像データを、前記情報収集部で収集された情報に基づいて合成する画像合成部とを備える。また、撮像装置は、パノラマ撮影の対象となる撮影視野の中央から一方の端までを確定するための情報を収集する情報収集部と、前記撮影視野に含まれる複数の部分視野に含まれる被写体を撮像する撮像部と、前記撮像部によって前記複数の部分視野について取得された画像データを、前記情報収集部で収集された情報に基づいて合成する画像合成部とを備える。
(もっと読む)
撮影装置、撮影方法、およびプログラム
【課題】連続して撮影された複数の画像のそれぞれから抽出された複数の動体が合成された画像をより迅速に生成することができる撮影装置、撮影方法、およびプログラムを提供する。
【解決手段】シャッタボタンが押されたとき、そのときメモリに記憶されているプレビュー画像p1−pnが読み出され、プレビュー画像p1−pnに基づいて1枚の背景画像が生成される。また、撮影画像P1がメモリから読み出されたとき、撮影画像P1と背景画像との差が求められ、差がある画素からなる動体画像が撮影画像P1から抽出される。撮影画像P1から抽出された動体画像が背景画像に合成され、合成画像C1が生成される。
(もっと読む)
注視点推定装置
【課題】ドライバを取り巻く状況に応じた注視点の推定を行う注視点推定装置を提供する。
【解決手段】予め用意された注意モデルとその時々で検出される特定情報とに基づいて、オブジェクト、画像情報、各特定情報に基づく注意分布である個別分布を生成し(S110〜S220)、これら個別分布を、同じ重み又は個々に重み付けして統合した注意分布である統合分布を生成することにより、ドライバの注意が向けられている位置(注視点)を確率的に推定し(S230)、前方画像から抽出された各オブジェクトに対するドライバの注意量を、統合分布に従って設定する(S240)。
(もっと読む)
道路区画線認識装置
【課題】間欠的な物標から構成される道路区画線を正確に認識できる道路区画線認識装置を提供すること。
【解決手段】車両に搭載され、道路上に間欠的に配置された物標により構成される道路区画線を認識する道路区画線認識装置1であって、前記間欠的な物標を含む一定の領域を撮像可能な撮像手段3と、前記撮像手段3により撮像された画像から、前記物標が示す特徴点を抽出した特徴点画像を生成する特徴点画像生成手段5と、時系列的に連なる複数の前記特徴点画像を重ね合わせて1フレームの合成画像を作成し、前記合成画像における前記特徴点から道路区画線を認識する道路区画線認識手段5と、時系列的に連なる複数の前記特徴点画像のうち、所定の比率以上の前記特徴点画像において、同じ位置に表れている特徴点を、前記道路区画線認識手段による道路区画線の認識に使用する特徴点から除外する除外手段5とを備えることを特徴とする。
(もっと読む)
画像処理装置及びその処理方法
【課題】画像の外縁の形状変化を伴う画像処理において、有効画素領域の切り出し方法を好適に切り替えることができる仕組みを提供する。
【解決手段】画像のアスペクト比を算出するアスペクト比算出部101と、画像の外縁の形状変化を伴う幾何学変換処理を実行する変換処理部102と、画像に幾何学変換処理を施すことによって生じたアスペクト比に係る変化量を算出する変化量算出部103と、変化量算出部103により算出された変化量が所定の閾値を超えるか否かを判断する判断部104と、判断部104による判断に基づいて幾何学変換処理された画像の有効画素領域の切り出し方法を切り替える画像切り出し部105を備える。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】被写体の画像情報や画像外情報だけでは区別できない別々の被写体を区別して、主要被写体を認識できるようにすること。
【解決手段】画像処理装置は、認識対象画像から計算される画像特徴量を生成する画像特徴量算出部31と、画像以外の情報から得られる画像外特徴量を取得する画像外特徴量算出部32と、上記画像特徴量と上記画像外特徴量とから、該画像のシーン情報の認識を行うシーン認識部33と、シーン情報と該シーン情報に対して典型的な主要被写体との対応関係を蓄積しておくシーン・主要被写体対応関係蓄積部42と、上記認識されたシーン情報と、上記蓄積された対応関係とを利用して、主要被写体候補を推定する主要被写体認識部34と、を備える。
(もっと読む)
情報提供装置
【課題】ドライバを取り巻く状況に応じた提供情報の制御が可能な情報提供装置を提供する。
【解決手段】予め用意された注意モデルとその時々で検出される特定情報とに基づいて注意分布を生成することにより、ドライバの注意が向けられている位置(注視点)を確率的に推定し(S110〜S230)、前方画像から抽出された各オブジェクトに対するドライバの注意量を、注意分布に従って設定する(S240)。更に、予め設定されたルールを用いて、特定情報から特定される状況に応じた各オブジェクトの重要度を設定し(S250)、その注意量と重要度とに基づいて、ドライバに対する情報の提供を制御する(S260)。
(もっと読む)
画像処理装置および画像処理方法
【課題】自然な表情の正視目線に補正する画像処理装置を実現する。
【解決手段】ユーザがカメラ(撮像手段12)を正視した状態で撮影して得た正視顔画像SGから目元画像MGを切り出した後、ユーザが表示手段14の表示画面を見つめている状態の顔を撮影して得た偏視顔画像HGを取得すると、その偏視顔画像HGを撮影した時の撮影距離が所定距離未満であれば、取得した偏視顔画像HGに、切り出した目元画像MGを合成して表示手段14に画面表示するので、自然な表情の正視目線に補正できる。また、顔の輪郭を含む目元画像MGを用いて偏視顔画像HGに合成しているので、目元画像MGを撮影した時の撮影距離と偏視顔画像HGを撮影した時の撮影距離とが異なる場合でも特徴点が多数ある為に拡大縮小することで自然な表情の正視目線に補正できる。
(もっと読む)
車両端部周辺画像表示装置
【課題】車両端部周辺が見やすく、且つ、車両端部周辺の障害物までの距離感も分かりやすい画像を表示することができる車両端部周辺画像表示装置を提供する。
【解決手段】カメラ10によって撮影された撮影範囲の全範囲を表示している全範囲画像(図4(A))では、車両の前バンパー50から遠方にかけてが示されているが、全範囲画像では、遠方に存在する他車両60のライトにより、車両端部周辺の障害物(ポール80)が見づらいこともあり、また、他車両60の存在自体により、車両端部周辺の障害物と自車両との距離感が分かりにくい。そこで、車両端部周辺画像(図4(B))では、自車両からの距離がマスク境界距離よりも近い側は画像表示するが、マスク境界距離よりも遠い範囲はマスクする。
(もっと読む)
画像処理装置、画像処理方法、および制御プログラム
【課題】様々な条件の顔画像に対して適切にメーキャップ処理を行うことができる画像処理装置および画像処理方法を実現する。
【解決手段】本発明に係る画像処理装置6は、顔画像の肌に、指定された色のメーキャップを合成する処理を行うものであって、顔画像の少なくとも一部の領域のピクセル毎に、顔画像における色の肌色度合いを特定する肌特定部22と、顔画像に、肌色度合いに応じた濃さでメーキャップを合成する合成部17とを備える。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】注目点の選定や注目点を追尾することが困難な複雑な形状の計測対象物であっても、また時間の経過とともに移動する計測対象物であっても、正確なキャリブレーションを実行することができ、所望の物理量を正確に計測することができる画像計測装置、画像計測方法、及びコンピュータプログラムを提供する。
【解決手段】フレーム画像をコマ送り再生表示し、コマ送り再生表示されたフレーム画像から、複数のフレーム画像の選択を受け付ける。選択を受け付けたフレーム画像を重ね合わせた合成画像を生成する。生成した合成画像を表示し、表示した合成画像上で所定の物理量を計測する。また、寸法が既知である球を計測対象物と同一の動画像に写り込むように配置し、計測対象物と球とを撮像して取得した動画像に基づいてキャリブレーションを実行する。
(もっと読む)
通行車両監視システム及び車両用監視カメラ
【課題】道路上の通行車両を正確に認識し、設置が容易で、かつ車両毎の走行状態の分析を負荷が集中することなく行うことができる通行車両監視システム及び車両用監視カメラを提供する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、その複数の監視カメラに接続されたセンタ装置4とからなる。 各監視カメラ2は、複数の撮像部21と、複数の画像から距離画像のデータを生成する立体計測部23と、距離画像に基づく基本監視部24と、メモリ27と、距離画像に基づいて認識された車両の識別情報を生成して、その識別情報と、その認識された車両についての時刻情報とを含む情報を前記記憶部に記録する計測及び記録処理部と、距離画像に基づいて、基本監視部とは別の監視処理を実行する追加監視部25を有する。
(もっと読む)
運転支援装置
【課題】車載カメラとして単眼カメラを備えた安価な構成により、従来よりコスト低減を図って、撮影カメラの撮影画像から将来の(その後の)TTCを正確に推定することができる車両支援装置を提供する。
【解決手段】車載カメラとしての単眼カメラ2により自車両1の周辺を撮影し、演算部3の近似手段により、単眼カメラ2の複数時点の撮影画像中の障害物の撮影倍率から衝突可能性の経時変化特性を近似し、演算部3の推定手段により、近似手段の近似結果に基づいて将来の衝突可能性を推定する。
(もっと読む)
境界線検出方法とパターン検査方法
【課題】特別なソフトウェアを使用することなく、より正確な境界線を求めることができる境界線検出方法を提供する。
【解決手段】隣り合う各領域Z1,Z2のピッチをP1,P2とし、R1(m)=mod(mP1,P2/2),R2(m)=mod(mP1,P2),R(m)=R1 (R1≠R2の時),R(m)=P2/2−R1(R1=R2の時),E(m)=R(m)/(P2/2)において、mが整数であるときE(m)が最も小さくなるmを求め、両領域全体において距離mP1離れた画素同士の比較検査を行い、正常な画素を消去し、欠陥として残る画素の包絡線を境界線とし、同様の操作を他の領域間で行いピッチの異なる領域を検出する。
(もっと読む)
181 - 200 / 1,911
[ Back to top ]