
Fターム[5B057CH08]の内容
画像処理 (340,757) | 処理部 処理装置、処理システム (15,018) | 演算器 (6,373) | 特定演算 (2,091)
Fターム[5B057CH08]の下位に属するFターム
フィルタリング、積和演算 (1,281)
Fターム[5B057CH08]に分類される特許
201 - 220 / 810
顔検出システム
【課題】外部の光変化による前方注視怠慢状態の検出性能が低下することを防止するための顔検出システムを提供する。
【解決手段】運転者の顔の右側に向かって赤外線を照射する第1照明部と、運転者の顔の左側に向かって赤外線を照射する第2照明部と、前記第1照明部および前記第2照明部から赤外線が照射された運転者の顔をそれぞれ撮影する画像撮影部と、前記画像撮影部から顔の左右画像を獲得し、獲得された左右画像の差画像を獲得して運転者の前方注視怠慢状態を判断する制御部とを含んでなることを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラムおよび同プログラムを記録した記録媒体。

【課題】様々なフレーム形状の眼鏡に対応可能な眼鏡モデルを生成して、画像中の眼鏡パターンを除去する画像補正の技術を提供する。
【解決手段】画像処理装置10の前処理部12は、入力された画像データから顔領域を識別・検出する。眼鏡モデル生成部15は、サンプル画像の学習パターンから眼鏡フレーム形状と眼鏡フレーム内部の眼球の形状などのテクスチャを加味した眼鏡モデルを生成する。特徴抽出手段部14は、顔領域に眼鏡モデルを適用し、眼鏡モデルパラメータを抽出する。眼鏡識別部16は、眼鏡の有無を識別する識別パラメータを読み込み、眼鏡モデルパラメータをもって入力画像データ内の眼鏡の有無を判定する。領域抽出部18は、入力画像データを任意の領域に分割する。補間部19は、分割領域のデータから任意のテクスチャを生成し各領域を統合する。この統合結果は出力部20をもって出力される。
(もっと読む)
画像のコントラストを維持しながらノイズを低減するための技術
画像内のノイズを低減するためのシステムおよび方法が開示される。本発明は、表示されるべき画像について、その画像は画素を有し、(1)第1の画素の値を1組の他の画素の値と比較し、(2)第1の画素に隣接する画素の値を1組の他の画素に隣接するさらなる画素の値と比較し、(3)1組の他の画素における各画素についてステップ(1)および(2)の結果に基づいて重みを決定し、(4)1組の他の画素における各画素の重みに基づいてノイズ除去された画素値を計算し、(5)第1の画素の値をノイズ除去された画素値に置換することによって、ノイズを低減するとともにコントラストを維持する。  (もっと読む)
(もっと読む)
超並列アクセラレータを使用して学習機械の訓練と分類とを並列化し高速化するシステム及び方法
パターンを認識するように装置を訓練する方法システムは、機械学習プロセスの複数のステップを実行するホストプロセッサをその装置に設けるステップと、少なくとも2つのプロセッサを有するアクセラレータをその装置に設けるステップと、訓練パターンデータをホストプロセッサに入力するステップと、訓練パターンデータを使用してホストプロセッサによる機械学習プロセスにおける係数変化を求めるステップと、訓練データをアクセラレータに転送するステップと、訓練データを使用してアクセラレータの少なくとも2つのプロセッサによってカーネルの複数のドット積を求めるステップと、ドット積をホストプロセッサに転送して戻すステップと、を有する。  (もっと読む)
(もっと読む)
画像処理装置、撮像装置及び画像処理方法
【課題】結像光学系の色収差に起因して、取得した画像内の明るい部分の周囲に出現する色滲みを効果的に除去する。
【解決手段】画像処理装置は、撮像装置100により被写体を撮像して得られた画像であって輝度飽和画素を含む第1の画像と、該撮像装置により該被写体を撮像して得られた画像であって第1の画像よりも輝度飽和画素を多く含む第2の画像とを用いて、色滲みを低減した画像を生成する。該画像処理装置は、第2の画像における輝度飽和画素を含む色滲み候補領域を抽出する抽出部157と、第1の画像のうち色滲み候補領域に対応する領域に対して空間演算を行って該第1の画像における色滲み推定量を算出する推定部151,153,152と、第1の画像の処理領域に対して色滲み推定量を用いた色滲み低減処理を行う処理部154,155とを有する。
(もっと読む)
画像処理方法
【課題】簡便な手法によりシーンの奥行き推定または前景抽出可能な画像処理方法を提供すること。
【解決手段】赤色光、緑色光、及び青色光をそれぞれ透過する第1乃至第3フィルタ領域20〜22を有するフィルタ3を介して、対象物体をカメラ2により撮影するステップS10と、撮影して得られた画像データを、赤色、緑色、及び青色成分に分離するステップS11と、前記赤色、緑色、及び青色成分のそれぞれにおける画素の対応関係を、三次元色空間における線型色モデルからの画素値のずれを基準に判断するステップS13と、前記赤色、緑色、及び青色成分において対応する各画素の位置ずれ量に応じて、各画素の奥行きを求めるステップS14、S15と、前記奥行きの大きさに応じて、前記画像データを加工するステップとを具備する。
(もっと読む)
高精細画像処理装置、高精細画像処理方法、およびプログラム
【課題】高精細で解像度の高い画像の生成に好適な画像フレームを選択可能とする画像処理技術を提供する。
【解決手段】連続写真や動画等の複数の画像フレームは、画像入力部101によって受け付けられて、周波数成分調査部102によって、画像フレームごとに周波数成分特性が分析され、高周波成分算出部103によって、画像フレームごとにその高周波成分の量が算出される。そして、入力画像選択部104が、高周波成分の量が所定値以上となる画像フレームを選択する。次に、超解像処理部105が、選択された画像フレームの画像データを用いて、高精細で解像度の高い画像を生成する。そして、画像出力部106は、生成された画像を出力画像信号として出力する。
(もっと読む)
信号処理装置、画像表示装置、再生装置、受信装置および強調化処理装置
【課題】モスキートノイズの低減処理を従来よりも適切に行うことが可能な信号処理装置を提供する。
【解決手段】モスキートノイズ低減部14において、画像データDinの画素値xとその移動平均値xavgとの差分値Δxの大きさに応じて、ゲイン値Gainが適応的に変化するように、ゲイン値Gainを画素ごとに算出する。また、その算出されたゲイン値Gainを用いて、画像データDinの画素値xと、差分信号における差分値Δxとの合成処理を行う。これにより、画像データDinに微小なノイズが含まれている場合に、そのような微小なノイズが含まれる画素信号に対し、選択的な合成処理(ノイズ低減処理)がなされるようになる。よって、従来のような閾値によらずに、急峻なエッジを保持しつつ、エッジ以外の微小なノイズを低減することが可能となる。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】 効果的に画像の平滑化処理を行うことを可能とする。
【解決手段】顔領域検出部51は、対象画像上の人物の顔部分が写っている顔の画像を含
む顔領域を検出する。補正部52は、顔領域内の顔を表す画像領域における所定領域の位
置に基づいて補正量を特定し、画像の色調をその補正量で補正する。出力制御部53は、
補正処理が施された対象画像の画像データから表示データ又は印刷データを生成し、表示
データを表示部に供給して表示させたり、印刷データをプリンタエンジンに供給して、印
刷データに基づく画像の印刷を実行させる。
(もっと読む)
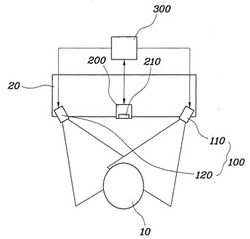
運転支援システム
【課題】簡易な構成で、ドライバーに死角範囲の目視確認を促すことができる、運転支援システムを提供する。
【解決手段】運転支援システムは、上方カメラ(110)、正面カメラ(120)、制御ECU(130)、表示部(140)を備える。各カメラ110および120によってドライバーの頭部を撮像する。そして、制御ECU(130)は、当該撮像された画像からドライバーの目の位置および顔向きに関する情報を生成する。そして、制御ECU(130)は、ドライバーが視認した車両外界の領域を算出し、当該車両外界の領域が予め定められた領域を網羅できた場合、表示部(140)を制御してドライバーにその旨を知らせる。
(もっと読む)
画像処理装置およびその方法
【課題】 電子写真方式のプリンタに適用可能なハーフトーンスクリーンを作成する。
【解決手段】 二値化部22、誤差検出器27、誤差配分マトリクス25、加算器21は、入力画像の注目画素を誤差拡散法によって二値化する。演算部23、ゲイン調整器24は、二値化後の画素を参照して注目画素に加算する値を演算する。加算器26は、演算された値を注目画素に加算する。制御部28は、ゲイン調整器24による演算を制御する。
(もっと読む)
画像処理装置及びその制御方法、プログラム
【課題】 簡単かつ容易に階調変換に起因するトーンジャンプを抑制し、好適に画像を補正することができる画像処理装置及びその制御方法、プログラムを提供する。
【解決手段】 入力した画像データから輝度値のヒストグラムから各輝度値の累積頻度を算出する。画像データを階調変換するための基本となる、入力輝度値に対する出力輝度値の分布からなる基本階調特性を設定する。生成したヒストグラムから階調性を抽出し、その階調性から、基本階調特性を補正するための第1の重みを算出する。各輝度値について、基本階調特性と累積頻度の差分に、第1の重みを乗じてに加算して、基本階調特性の各入力輝度値に対する出力輝度値の補正値を演算する。演算した各入力輝度値に対する出力輝度値の補正値からなる階調変換曲線を用いて、画像データを階調変換する。
(もっと読む)
画面データ送信装置、画面データ送信方法及び画面データ送信プログラム
【課題】広い領域を占める動画が画面に含まれる場合であっても、カーソルの画質を維持する。
【解決手段】第1の画面フレームに含まれる複数のブロックの各々について、前記第1の画面フレームよりも前の第2の画面フレームに含まれ、対応する位置にあるブロックと差分があるか否かを検出する差分検出手段と、前記差分検出手段の検出結果が肯定的であるブロックのデータを送信する送信手段と、差分存在領域に含まれるブロックのフレームレートを、出力フレームレートよりも、低くするフレームレート低減手段と、を備える。
(もっと読む)
器官検出装置、器官検出方法、及びコンピュータプログラム
【課題】圧縮された画像において器官の検出に要する時間を短縮することを可能とする。
【解決手段】圧縮画像を、圧縮画像の解像度よりも低い解像度の画像に展開し、展開され
た画像において人物の顔を検出し、圧縮画像の一部であって、検出された顔の一部を含む
領域を、先の展開処理よりも高い解像度で展開し、高解像度で新たに展開された画像にお
いて人物の顔の器官を検出する。
(もっと読む)
鋼管外表面の印字判定方法
【課題】鋼管の外表面に印字された文字の良否を精度良く判定する印字判定方法を提供する。
【解決手段】所定の文字を良否判定用印字部として完全に印字した場合の白色部の面積Sを予め求めておき、前記良否判定用印字部を印字する良否判定用印字を個々の鋼管に対して行ない、該良否判定用印字を行なった鋼管を固定カメラにより、該良否判定用印字を含む所定領域を撮影し、個々の鋼管について、前記所定の文字を完全に印字した場合の白色部の投影面積SPを算出するとともに、実際に印字された良否判定用印字部について撮影された白色部の面積SOを測定し、完全に印字した場合の白色部の投影面積SPに対する撮影された白色部の面積SOの比率で表わされる判定指数D(%)=100×SO/SPを算出し、予め設定したしきい値とを比べることによって印字の良否を判定する。
(もっと読む)
情報処理装置、および情報処理方法、並びにコンピュータ・プログラム
【課題】カメラの取得画像に基づいて撮影画像に含まれる特徴点の3次元位置を効率的に算出する構成を実現する。
【解決手段】カメラの取得画像に基づく特徴点の3次元位置取得構成において、カメラ撮影画像の画像フレーム中、複数の先行画像フレームのみを利用した対応特徴点解析による特徴点の3次元位置情報を初期情報として取得する処理と、この初期情報を初期画像フレームに対する状態情報として設定して、後続画像フレームに対する拡張カルマンフィルタ(EKF)を適用した処理により、後続フレーム中の特徴点の3次元位置情報を取得する構成としたので、例えばフレームマッチングなどを伴う特徴点抽出処理は、先行画像フレームに対してのみ実行すればよく、効率的な特徴点の3次元位置情報の取得および3次元画像データの生成が実現される。
(もっと読む)
画像監視装置
【課題】設置時に煩雑な作業を要することなく、監視領域の人物を撮影した監視画像から、不審人物の有無を判定可能な画像監視装置を提供する。
【解決手段】画像監視装置10は、監視画像を順次取得する撮像部100と、監視画像から人物領域を検出する人物領域検出手段211と、予め正面を向いた顔の特徴点配置を記憶する配置情報記憶手段220と、人物領域から顔の特徴点を抽出し、配置情報記憶手段220の情報と比較して、正面向きの顔に対する特徴点位置のずれ量を検出する顔向き検出手段212と、特徴点位置のずれ量が顔を背けた状態に対応する所定量以上であれば人物領域について不審行動と判定する不審行動判定手段214と、順次取得される複数の監視画像において対応する人物領域を追跡する追跡手段213と、追跡手段が追跡した人物領域が不審行動と判定された回数に基づき不審人物と判定する不審人物判定手段215とを有する。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】少ない演算量により、相関ウィンドウのサイズを適切に設定できるようにする。
【解決手段】互いに異なる位置において被写体を撮影することにより取得した基準画像G1と参照画像G2とを取得し、被写体検出部30が、基準画像G1から所定被写体を検出する。基準画像G1と参照画像G2との間において、互いに対応する対応点を探索する際に使用される相関ウィンドウのサイズを設定するウィンドウサイズ設定部33が、基準画像G1における所定被写体を含む所定被写体領域内の画素と対応する対応点を探索するための相関ウィンドウWのサイズを、所定被写体領域のサイズに応じて設定する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】綺麗な復号を実現できる暗号化画像を作成することを課題とする。
【解決手段】画像処理装置は、処理対象である画像を複数の小領域に分割し、分割した複数の小領域を小領域各々の画像内における位置を一意に指定する暗号鍵を用いて、当該暗号鍵によって指定される位置へと並べ替え、小領域が並び替えられた画像である処理後画像において、当該小領域内の一部領域である極小領域を構成する画素について、当該極小領域を構成する画素について画素値を変換する際に用いる演算手法を、当該極小領域を構成する画素以外の所定の画素から決定し、画素値を変換する。
(もっと読む)
対象画像からの特定種類の被写体の画像に対応する画像領域の検出
【課題】特定種類の被写体の画像に対応する画像領域を容易に検出することを可能とする。
【解決手段】画像処理装置は、検出すべき被写体の種類を設定する検出被写体設定部と、対象画像上に判定対象画像領域を設定する判定対象設定部と、被写体の種類毎に設定された、判定対象画像領域が被写体の種類の画像に対応する画像領域であることの確からしさを表す評価値を算出するための評価用データを記憶する記憶部と、検出すべき被写体の種類に対応する評価用データと判定対象画像領域に対応する画像データとに基づき評価値を算出する評価値算出部と、評価値と判定対象画像領域の位置およびサイズとに基づき被写体領域を設定する領域設定部とを備える。
(もっと読む)
201 - 220 / 810
[ Back to top ]