
Fターム[5B057CH08]の内容
画像処理 (340,757) | 処理部 処理装置、処理システム (15,018) | 演算器 (6,373) | 特定演算 (2,091)
Fターム[5B057CH08]の下位に属するFターム
フィルタリング、積和演算 (1,281)
Fターム[5B057CH08]に分類される特許
141 - 160 / 810
遺伝的処理装置、遺伝的処理方法およびプログラム

【課題】遺伝的処理によって得られた変換器の演算コストを低減する。
【解決手段】入力データを処理して出力データとして出力する複数の処理部品の入出力間を接続して組み合わせた少なくとも1つの変換器から、遺伝的処理により新たな変換器を生成する生成部と、新たな変換器において入出力間の接続により連結された2以上の処理部品を統合して、当該2以上の処理部品に相当する処理をする処理部品に置き換える統合部と、を備える遺伝的処理装置を提供する。
(もっと読む)
医用画像処理装置及び方法

【課題】画像の位置合わせを行う際の一致度合いの判定を行うための新たな指標を提供する。
【解決手段】画像処理装置1は、参照画像及び観測画像をそれぞれ読み出し、両画像の位置決めを行って、参照画像と観測画像とを重ね合わせた合成画像を生成する画像合成処理部15と、合成画像の各ボクセルに割り当てられたボクセル値とのペア(ai,bj)に基づいて、同時確率分布p(ai,bj)と、周辺確率分布p(ai)、p(bj)とを算出する確率分布算出部19と、同時確率分布及び周辺確率分布に基づいて、個別エントロピー相関係数(IECC)を算出する合成画像評価部21と、IECCが所定の閾値以上であるか否かを判定する最適化処理部23とを備える。
(もっと読む)
複数の短時間露光に応答する、シミュレートされた長時間露光画像の生成
【課題】より少ない機器及びより少ない困難で、長時間露光画像を自動的に生成するシステム及び方法を提供すること。
【解決手段】わずかに異なる時間にキャプチャされた短時間露光画像のシーケンスから長時間露光画像をシミュレートする。画像のシーケンスは、時間積分プロセスで結合され、三脚によって固定されたスチールカメラからの出力をシミュレートする長時間露光画像を生成し、この感光材料は、シーケンスの最初の入力画像の開始時から入力シーケンスの最後の画像まで、同じシーンに露光される。この方法は、手持ち式ビデオ及び画像記録装置の限界を克服し、ユーザが、通常は専門家の制御下にある高級なデジタルスチールカメラと関連する効果を容易に生み出すことを可能にする。
(もっと読む)
画像処理装置及びその方法
【課題】連続する原稿の画像データを処理する際に、複数ページ分の画像データのうちの任意のページ、特に現在処理中のページの次のページの画像データの処理を、他の画像処理に依存することなく高速化できるようにする。
【解決手段】実施の一形態を適用することで、第1の処理の定義及び定義された第1の処理による処理結果に対する第2の処理の定義に応じ、第1の処理に適した配列または回路構成、及び第2の処理に適した配列または回路構成による動作が可能で、前記定義に応じて配列または回路構成を変更して、第1の処理及び第2の処理を実行することが可能となる。
(もっと読む)
三次元形状測定装置及び三次元形状測定方法
【課題】パターン投影型の三次形状測定の原理に起因する測定誤差を抑えること。
【解決手段】本発明の三次元形状測定装置を例示する一態様は、測定対象物上に縞パターンを投影する投影手段(13)と、測定対象物上に投影される縞パターンの位相を変化させながら、その測定対象物の撮像を繰り返すことにより、測定対象物上の各位置から輝度変化データを取得する撮像手段(14)と、測定対象物に対する縞パターンのフォーカス位置を変化させながら、輝度変化データの取得を繰り返し実行させることにより、測定対象物上の各位置から輝度変化データを複数ずつ取得する制御手段(101)と、制御手段が取得した複数の輝度変化データの中から信頼性の高いものを選出する選出処理を、測定対象物上の各位置について行う選出手段(100)と、測定対象物上の各位置について選出された輝度変化データによって表される各位置の座標を、測定対象物の面形状として求める形状算出手段(100)とを備える。
(もっと読む)
顔の特徴部位の座標位置を検出する画像処理装置
【課題】本発明は、画像に含まれる顔の特徴部位の位置を検出する処理の効率化・高速化を図ることを目的とする。
【解決手段】注目画像に含まれる顔の特徴部位の座標位置を検出する画像処理装置は、注目画像から顔画像の少なくとも一部を含む画像領域を顔領域として検出する顔領域検出部と、特徴部位の座標位置を検出するために注目画像に設定される特徴点の初期位置を、顔領域の検出に関連する情報である顔領域検出情報に基づいて設定される複数の初期位置の候補から設定する初期位置設定部と、初期位置に設定された特徴点の設定位置を特徴部位の位置に近づけるように補正し、補正された設定位置を特徴部位の座標位置として検出する特徴位置検出部と、を備える。
(もっと読む)
顔認識装置及び顔器官の特徴点特定方法
【課題】顔を構成する器官の特徴点を高精度に特定する顔認識装置を得る。
【解決手段】画像内から検出された顔器官に対応する複数の特徴点候補を配置する特徴点候補配置部2と、二次元の特徴点候補の配置が三次元の基準点配置に一致するようにして、二次元の顔画像を三次元の顔画像に正規化する三次元正規化部3と、正規化された顔画像と、複数の顔画像から予め作成された基準顔画像との類似度を測定する類似度測定部4と、前回探索時の類似度と今回測定類似度の変化量を算出する変化量算出部5と、類似度又は/及び変化量に基づき、探索終了又は探索継続を判定する比較部(検索終了判定部)6と、探索終了判定時の特徴点候補を探索特徴点として確定する収束判定部7と、前記検索終了判定部における探索継続判定時に、前記類似度の変化量に基づき、前記特徴点候補の配置を変化させる特徴点候補補正部8とを備える。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】線状構造からなる対象組織であっても、誤接続を軽減し、本来の線状構造をより正確に反映した木構造を生成させる。
【解決手段】被写体を撮像して得られた三次元画像に対して所定の検出処理を施すことにより、線状構造からなる対象組織を表す複数の候補点の位置情報と主軸方向を算出し、算出された位置情報および主軸方向に基づいた変数とするコスト関数を用いて、複数の候補点が接続されるように再構築する。
(もっと読む)
画像におけるノイズ除去装置
【課題】本当にノイズであるか否かを正確に判断してノイズを除去できるようにする。
【解決手段】病理画像からノイズ5を除去する場合、癌細胞4aが存在する同一部位に対して異なる解像度の第一層画像21から第三層画像23を取得する。そして、まず、第一層画像21をセルに区切り、各セルがノイズ5であるか否かを第一確率モデルで判断する。その結果、そのセルがノイズ5でないと判断された場合は、そのセルの高解像度の画像を読み出し、セルで区切ってノイズ5であるか否かを第二確率モデルで判断する。この第二確率モデルを作成する場合、第一確率モデルの判断結果を組み込んで作成し、これによって、低解像度の画像で全体を見渡してノイズを判断し、また、高解像度の画像でその結果を考慮した細かい部分を判断する。
(もっと読む)
画像処理装置および画像処理方法
【課題】メモリ空間を有効に活用し、描画処理を高速化し、高画質を保持できる画像処理装置および画像処理方法を提供する。
【解決手段】Index値による描画と、必要な画素または領域のみにする描画情報の色値を用いた描画を、条件に応じて一方または両方行うことにより、メモリ空間を有効に活用し、描画処理を高速化し、かつ、高画質を保持する。特に、Indexテーブルのキーとして用いるIndex番号の衝突が起きる場合や、写真画像の描画を行う場合には、Index値による描画と描画情報の色値を用いた描画とを行う。また、Index番号の衝突が起きる場合や、写真画像の描画を行う場合で、その割合が高い場合は、描画情報の色値を用いた描画のみ行う。
(もっと読む)
画像処理装置及び画像処理方法
【課題】画像劣化が低減された画像処理を低容量のメモリで行う画像処理装置及び画像処理方法を提供する。
【解決手段】画像データをブロック単位で取得する取得手段と、前記取得した所定の数の画像ブロックを保持する保持手段と、前記保持手段に保持された画像ブロックにおける注目画素を決定する決定手段と、前記決定した注目画素に対してハーフトーン処理を行うハーフトーン処理手段とを備え、前記保持手段により保持する画像ブロックの数は、前記ハーフトーン処理の誤差分配の影響範囲に応じて定められ、前記決定手段は、前記画像ブロックのサイズに応じて前記注目画素を決定する。
(もっと読む)
画像処理装置
【課題】画像の変化に応じて鮮鋭化処理又はコアリング処理を制御することが可能な画像処理装置を提供すること。
【解決手段】画像処理装置は、画像データに含まれた複数フレーム間の差分値を検出する検出手段と、前記検出された差分値に応じて、前記画像データに対する鮮鋭化効果ゲインを制御する鮮鋭化パラメータを設定する鮮鋭化制御手段と、前記鮮鋭化パラメータに基づき前記画像データに対して鮮鋭化処理を実行する鮮鋭化処理手段と、を備えている。
(もっと読む)
多次元補間装置、多次元補間方法、及びコンピュータプログラム
【課題】色空間の変換などの補間演算を高速に行なえるようにすることが、可及的に小さな回路規模で容易に実現できるようにする。
【解決手段】データ分割部210により、N次元のデジタル画像信号205を上位ビット信号212と下位ビット信号214とに分割し、分割した上位ビットの信号すべての組み合わせに対応する参照値を重複することなく2N-1個のサブメモリ(多次元LUT260)に分割記憶するとともに、補間演算に必要な(N+1)個の参照値を参照値読み出し部250で同時に読み出すようにすることにより、補間演算を高速化することができるとともに、割り算器がなくてもサブメモリへアクセスするためのアドレスを生成することができるようにして、色空間の変換などの補間演算を高速に行なえるようにすることが、可及的に小さな回路規模で容易に実現できるようにする。
(もっと読む)
街路レベルの画像間の移行を示すシステム及び方法
街路レベルの画像間の移行を表示するシステム及び方法が提供される。一態様では、このシステム及び方法は、3D位置に関連付けられた2Dの街路レベルの画像(1110)からの画像でテクスチャー加工された複数のポリゴン(1120)を作り出す。ここで、3D位置は、画像内に含まれる目的物(320,322)の3D位置に一致する。そして、これらのポリゴン(1120)は、当初の画像内に含まれた目的物の間を移動する外観を伝えるために、様々な視点から表示される。 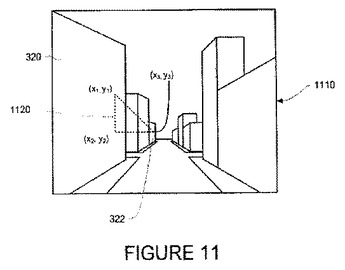 (もっと読む)
(もっと読む)
カラーデバイスの特性化に品質評価を提供する方法、装置、及びシステム
カラー特性品質を評価する方法、装置、及びシステムは、第1のデバイス依存入力カラー値のセット及び前記第1のデバイス依存入力カラー値のセットに関して前記ディスプレイにおいて測定された出力表示値から正変換及び逆変換のうち一方を判定し、且つ、正変換及び逆変換のうち前記判定された少なくとも一方を使用しつつ第2のデバイス依存入力カラー値のセットを変換して中間的なデバイス依存入力カラー値のセットを提供するように構成された特性化ユニットを含む。方法、装置、及びシステムは、正変換品質評価及び逆変換品質評価のうち少なくとも一方を実行する検査ユニットをさらに含む。 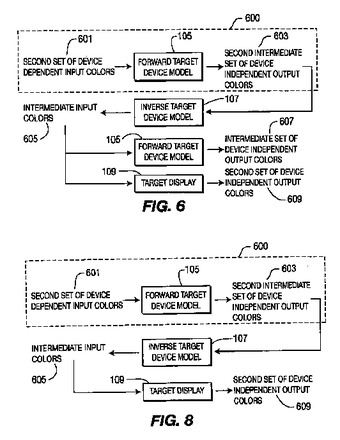 (もっと読む)
(もっと読む)
コンピュータグラフィックスのためのスムージングされたローカルヒストグラムフィルタ
ドメインシフトされたトーンフィルタカーネルに基づきオフセットカーネルイメージを生成することによって、ローカルヒストグラムとローカルヒストグラムベースファンクションとが決定可能である。オフセットカーネルイメージは、複数のイメージ位置及び/又はローカル近傍サイズ、形状及びウェイトに対して再利用可能である。所望のローカル近傍サイズ、形状及び周波数ドメイン特性を表す近傍フィルタは、オフセットカーネルイメージに適用される。近傍フィルタは、空間と時間に関して近傍を評価するための時間次元を含むものであってもよい。近傍フィルタリングされたオフセットカーネルイメージの値は、関連するドメインシフトされたトーンフィルタカーネルのドメインに対応するローカルヒストグラム又はローカルヒストグラムベースファンクションのサンプルを表す。トーンフィルタカーネルは、任意のファンクションであってもよい。ローカルヒストグラムファンクションの値は、ヒストグラムカーネルによりサンプリングされてもよい。他のトーンフィルタカーネルの微分又は積分であるトーンフィルタカーネルは、ファンクションの微分又は積分をサンプリングするのに利用されてもよい。  (もっと読む)
(もっと読む)
ボリュームレンダリング超音波画像における対象ボリュームを識別するシステム及び方法
【課題】 ボリュームレンダリング画像内の対象ボリュームを識別し且つ選択するためのシステム及び方法について開示している。
【解決手段】 一実施形態においては、本発明は、音響データを収集し、収集された音響データから三次元(3D)超音波画像を生成し、表示における超音波画像をレンダリングし、音響データの選択された部分を修正し、並びに、レンダリング超音波画像においてハイライト領域のフォームに修正された音響データを表示し、ハイライト領域は含まれるボリュームを規定する。
(もっと読む)
赤目を検出する方法、赤目検出システム、赤目検出装置、コンピューター読み取り可能な媒体および画像処理装置
【課題】ニューラルネットワーク分類器(NNC)を用いた赤目検出方法を提供すること
。
【解決手段】まず画像において特定された赤目オブジェクト候補のセットが受信され、次
に赤目オブジェクト候補から特徴点が抽出され、複数の分類器を用いて偽の赤目オブジェ
クトが抽出された特徴点に基づき赤目オブジェクト候補のセットから除去される。複数の
分類器の内第1および第2のものは各々抽出された特徴点の第1および第2のものを用い
て第1範囲のサイズにオブジェクトを分類し、複数の分類器の内第3および第4のものも
各々抽出された特徴点の第1および第2のものを用いて第2範囲サイズにオブジェクトを
分類する。
(もっと読む)
パターン認識プロセッサの電力消費管理のための方法およびシステム
開示されているのは次のような方法およびシステムである。その中には、パターン認識プロセッサ(14、96、98)を含む装置がある。幾つかの実施形態において、パターン認識プロセッサ(14、96、98)は、第1の複数の導体(120)、第1のブロック停止回路(96、124)、および複数のグローバル入力導体(119)を介してデコーダ(28)に結合されるフィーチャセル(100、102、104)の第1のブロック(106)を含む。パターン認識プロセッサ(14、96、98)はさらに、第2の複数の導体(120)、第2ブロック停止回路(98、126)、および前述の複数のグローバル入力導体(119)を介してデコーダ(28)に結合されるフィーチャセル(108、110、122)の第2ブロック(114)を含む。  (もっと読む)
(もっと読む)
画像認識アルゴリズム、それを用いて目標画像を識別する方法、および、携帯用電子装置へ送信するデータを選択する方法
【課題】カメラの視野内にある人の位置および物体を示すパラメータである文脈情報(位置および方向のような)に基づいて、画像および映像内に対象物体を提供し、かつ一致させる。
【解決手段】画像認識アルゴリズムは、キーポイントに基づく比較および領域に基づく色彩比較を含む。画像認識アルゴリズムを用いて目標画像を識別する方法は、処理装置で入力を受信する段階であって、その入力は、目標画像に関連するデータを含む段階、画像を画像データベースから検索することを含む検索ステップを実行する段階であって、その画像が受理または拒絶されるまで、その画像を候補画像として指定する。画像認識アルゴリズム出力を得るために、目標画像および候補画像上で画像認識アルゴリズムを実行するために、処理装置を使用することを含む画像認識ステップを実行する。
(もっと読む)
141 - 160 / 810
[ Back to top ]