
Fターム[5B057CH08]の内容
画像処理 (340,757) | 処理部 処理装置、処理システム (15,018) | 演算器 (6,373) | 特定演算 (2,091)
Fターム[5B057CH08]の下位に属するFターム
フィルタリング、積和演算 (1,281)
Fターム[5B057CH08]に分類される特許
61 - 80 / 810
放射線撮影装置、放射線撮影システム、画像処理装置及びプログラム
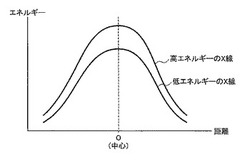
【課題】逆コンプトン散乱により放射線を照射する放射線源を用いた場合でも良好なエネルギーサブトラクション画像を得ることができる放射線撮影装置、放射線撮影システム、画像処理装置及びプログラムを提供する。
【解決手段】撮影された高エネルギーの放射線による放射線画像及び低エネルギーの放射線による放射線画像を対応する画素毎に、放射線源から照射される放射線の中心位置からの距離に応じて重み付けを変え、高エネルギーの放射線による放射線画像の重み付けを小さくして高エネルギーの放射線による放射線画像から低エネルギーの放射線による放射線画像を減算する重み付け演算を行って軟部画像を生成する。
(もっと読む)
演算装置および演算方法

【課題】インテグラルイメージを展開するメモリを事前に準備しておくことなく、インテグラルイメージを用いて矩形領域の積算処理を行うことができる演算装置および演算方法を提供する。
【解決手段】2次元の第1の方向および第2の方向に配列された複数の画素の値からなる画像データ群の画素の値を、第1の方向および第2の方向に順次読み出すデータ読み出し部と、基準画素の位置と第1の位置とを頂点とする矩形領域内の第1の積算値を出力する第1のデータ積算部と、基準画素の位置と第2の位置とを頂点とする矩形領域内の第2の積算値を出力する第2のデータ積算部と、第1の積算値と第2の積算値とに基づいて、第1の画素数と第2の画素数とによって表される第1の矩形データ領域の画素の値の累積値を求めるデータ累積演算部と、を備え、第1の矩形データ領域を第1の方向および第2の方向に順次移動させたときの、複数の画素の値の累積値を順次出力する。
(もっと読む)
画像処理装置、及び、画像処理方法
【課題】ユーザが車両を一旦停車させた後に後進させながらハンドルを操舵して駐車させる縦列駐車をする場合に、車両を適切な位置に一旦停車させることによって適切な駐車をさせることができる技術を提供する。
【解決手段】画像処理装置は、表示画像において、車両が縦列駐車される場合の駐車開始位置において車両の側面と他の物体との間隔として必要な間隔を示す指標を表示画像に重畳してディスプレイへ表示させるため、ユーザは車両を縦列駐車させる際に、ディスプレイへ表示された表示画像の指標を参考にすれば駐車開始位置において車両の側面と他の物体との間隔として必要な間隔をとることができ、車両を適切に縦列駐車させることができる。
(もっと読む)
画像超解像処理装置及びそのプログラム
【課題】原画像に対して予め縮小された縮小画像を画像拡大する画像超解像処理装置及びそのプログラムを提供する。
【解決手段】原画像に対して予め縮小された縮小画像を入力して直交変換処理を施し、縮小画像スペクトルに変換する。当該原画像のサイズに戻すための拡大倍率に従って、前記縮小画像スペクトルから、当該縮小画像の空間高周波スペクトルを推定して生成する。予め決定される当該原画像の帯域毎のスペクトルパワー代表値を表す原画像帯域毎スペクトルパワー代表値に対して、前記拡大倍率に従って、前記縮小画像スペクトル及び前記空間高周波スペクトルの各帯域幅内の代表値となるように補正して、原画像帯域毎スペクトルパワー補正値を生成し、前記縮小画像スペクトル及び前記空間高周波スペクトルを補正する。当該補正した縮小画像スペクトル及び空間高周波スペクトルに対して逆直交変換処理を施し、当該縮小画像を拡大した画像を生成する。
(もっと読む)
SIMD型マイクロプロセッサ及びその処理方法
【課題】高速に階調値のヒストグラムを生成し、システム全体のスループットを向上させる。
【解決手段】プロセッサエレメントPEn(n=0,1,…,255)はそれぞれ、階調値nに対応するアドレスnを有する。マイクロカウンタ12は、カウンタレジスタ15のビット幅より小さいビット幅を有する。外部データ転送装置2から、画素データの画素値をアドレスとして含むアドレス信号が入力される毎に、当該入力されるアドレス信号に含まれるアドレスを有するプロセッサエレメントPEnのマイクロカンタ12は、カウント値C12を1だけインクリメントする。グローバルプロセッサ10は、所定のタイミングで、カウント値C12を、対応するカウンタレジスタ15に格納されたカウント値C15に累積加算するようにALU14を制御する並列加算処理を実行し、各マイクロカウンタ12に格納されたカウント値C12をリセットするように制御する。
(もっと読む)
放射線撮影システム及びその画像処理方法
【課題】プレ撮影と本撮影との間での格子位置の変動によるアーチファクトの発生を防止する。
【解決手段】被検体を配置しない状態でプレ撮影を行った後、被検体を配置して本撮影を行う。X線画像検出器で取得された複数の縞画像に基づき、数式(A)及び(B)を用いて、プレ撮影時に第1の位相微分像ψα1(x,y)及びψβ1(x,y)を算出し、本撮影時に第2の位相微分像ψα2(x,y)及びψβ2(x,y)を算出する。そして、画素ごとに、ψα2(x,y)−ψα1(x,y)とψβ2(x,y)−ψβ1(x,y)とを算出し、両者から絶対値の小さい方を選択することにより、補正済位相微分像を生成する。
 (もっと読む)
(もっと読む)
画像処理装置及び方法ならびにプログラム
【課題】画像処理モジュール及びバッファモジュールがパイプライン等の形態で連結されて成る画像処理部において、画像処理モジュールの処理時間の計測を、計測を行わない場合の負荷が増大したり、画像処理モジュールを実現するプログラムの変更を必要となったりすることなく実現する。
【解決手段】前段から画像データを取得して画像処理を行い、画像処理を経た画像データを後段へ出力する画像処理モジュール38と、前段からの画像データをバッファに書き込ませ、バッファに記憶されている画像データを後段によって読み出させる処理を行うバッファモジュール40をパイプライン形態等で連結した画像処理部50の構築にあたり、動作モードとして計測モードが選択されている場合は、画像処理モジュール38とワークフロー管理部46Aの間に、情報の送受を中継すると共に処理時間の計測を行う処理時間計測モジュール48を設ける。
(もっと読む)
画像データ処理装置、画像データ処理方法、画像データ処理プログラム、および、撮像装置
【課題】ユーザが望んでいる画像からのずれを合成画像において回避することを可能とした撮像装置を提供することである。
【解決手段】本発明の撮像装置では、第1ベース画像選定部31および第2ベース画像選定部36によって、取り込んだ複数枚の画像データを合成する際の重ね合わせ領域に使用される第1ベース画像と、重ね合わせを行わない領域に使用される第2ベース画像が独立に選択される。よって、例えば、取り込まれた複数の画像データ中の1枚目に撮影した画像に対応する画像データを、重ね合わせを行わない領域に使用する第2ベース画像として選択することで、ユーザがシャッターボタンの押下時の画像が取り込めたと考えている場合に、ユーザが望んでいる画像からのずれを合成画像において回避することができる。
(もっと読む)
画像処理装置および画像処理方法
【課題】歪みの形状に応じて発生する補間演算の処理のエラーを回避することができる画像処理装置および画像処理方法を提供する。
【解決手段】撮像光学系の歪曲収差を有する入力画像データに歪補正処理を行う歪補正部を有し、歪補正部は、歪補正処理を行って出力する出力画像データの位置に対応した入力画像データの位置を表す座標を求める歪補正座標変換部と、入力画像データの座標に基づいて、歪補正処理に用いる入力画像データの範囲を算出する範囲算出部と、入力画像データの座標に引き続き、入力画像データの範囲の情報を記憶する補正情報記憶部と、入力画像データ記憶部と、入力画像データの範囲の情報が記憶された後、入力画像データ記憶部に記憶している入力画像データの量を確認し、補間演算に必要な量以上であるときに、入力画像データの座標に基づいて、入力画像データに対して補間演算を行って出力画像データを生成する補間演算部と、を備える。
(もっと読む)
色処理装置およびその方法
【課題】 画像形成に使用する材量が蛍光物質を含む場合を考慮して、少ないデータ量で、任意の観察光源の下における色を高精度に算出する。
【解決手段】 蛍光特性生成部202は、紫外域から可視域の範囲において、単色光を所定の記録媒体上に形成された色票に照射して色票からの放射光の三刺激値を測定した測定値、および、単色光の放射輝度を測定した測定値を入力する。そして、入力した三刺激値と放射輝度から、単色光の波長における三刺激値生成率を算出する。光源情報入力部203は、画像の観察光源の、紫外域から可視域の範囲の分光放射輝度を入力する。測色値算出部204は、紫外域から可視域の範囲の複数の波長における三刺激値生成率と分光放射輝度から、色票を観察光源の下で観察する場合の測色値を算出する。
(もっと読む)
画像評価装置および画像評価プログラム
【課題】画面に表示される画像として制作者が意図する優れた画像であるのか否かを評価する。
【解決手段】画像評価装置1は、オブジェクトの領域および重要度をパラメータで指定したWebページ(画像)を記述したHTML文書を作成するマークアップ文書作成手段11と、HTMLファイルを読み込んで、レンダリングして表示装置Dに表示させると共に、埋め込まれているパラメータを抽出するマークアップ文書解析手段14と、表示されたWebページにおいて領域および重要度を指定パラメータにて指定する領域重要度指定手段15と、Webページから顕著性マップを算出する顕著性算出手段13と、HTML文書のパラメータで示される領域毎に顕著性マップのマップ値を利用した評価値を算出する評価値算出手段17と、評価値を重要度にて重み付けて合計することでWebページについての総合評価値を算出して表示装置Dに表示させる評価結果表示手段18とを備える。
(もっと読む)
画像変換装置
【課題】ハードウェアでも実施可能なカラー画像から濃淡画像への画像変換装置を提供する。
【解決手段】カメラ10に内蔵されるカラー/濃淡変換回路14において、2次多項式
D=aR2+bG2+cB2+dRG+eGB+fBR+gR+hG+iB+j
より変換後の画素値Dを算出する。パラメータa,b,c,d,e,f,g,h,i,jは、抽出したい基準色のR,G,Bの値に基づいて決定される。
(もっと読む)
動き補償装置
【課題】1枚の対象画像と1枚の参照画像との間で動き推定を行った結果を用いて、複数枚の対象画像の動き補償を行うことが可能な動き補償装置を提供する。
【解決手段】動き補償装置1は、複数の対象画像T1,T2,…,TNから代表画像Dを生成する代表画像生成手段10と、外部から参照画像Sと、参照画像S内に設定された局所領域Lkの入力を受け付け、代表画像D内において、局所領域Lkに対応する対応領域Rkを求めることで、代表画像Dと参照画像Sとの間の動きベクトル情報を求める動き推定手段20と、それぞれの対象画像T1,T2,…,TNに対応して、動きベクトル情報に基づいて当該対象画像T1,T2,…,TNを移動または変形し、その結果を動き補償画像C1,C2,…,CNとして出力する画像変形手段301,302,…,30Nと、を備える。
(もっと読む)
画像処理装置、撮像装置および画像処理プログラム
【課題】様々な撮像条件にて画像の十分な高精細化を行える画像処理装置を提供する。
【解決手段】画像処理装置110は、撮像系100,102により生成された入力画像を、撮像系の応答関数を用いて得られる評価値に差を持つ複数の領域に分割する領域分割手段1105と、該各領域に対して、該領域ごとに異なる応答関数を用いた画像精細度を増加させるための画像処理を行う処理手段1104とを有する。処理手段は、撮像系における該入力画像の生成時の撮像条件に対応する応答関数であって、記憶手段から読み出した、または演算により生成した応答関数を用いて画像処理を行う
(もっと読む)
施肥マップ生成システム,その方法,産業用ヘリコプタ,サーバ,可変施肥機
【課題】広面積の圃場に対してもメッシュ毎の施肥を行ない、的確で効率的な施肥作業を可能とする。
【解決手段】産業用無人ヘリコプタに搭載された各種センサによる圃場のリモートセンシング(遠隔探査)を行い、土壌の画像及び自然光の反射率を計測する。一方、圃場の数地点の土壌をサンプリングして分析し、熱水抽出窒素を得る。得られたリモートセンシングデータと、土壌サンプリングデータとに基づいて、熱水抽出性窒素マップを生成する。この熱水抽出性窒素マップと、作付けする作物や使用する肥料のデータを基に演算処理を行い、例えば、10mメッシュ単位の施肥マップを生成する。生成した施肥マップと、GPS位置情報を基に、自動可変施肥機を自動制御し、適切な肥料を吐出して施肥を行なう。
(もっと読む)
画像処理装置、画像処理方法
【課題】 レンズ収差補正に伴って低下した解像度の復元処理を、より高画質かつ低コストで実現する為の技術を提供すること。
【解決手段】 撮影パラメータと、撮影パラメータが設定されたときのレンズの収差特性を示すレンズ収差特性値と、のセットを、異なる収差特性毎に作成し、それぞれのセット中の撮影パラメータを用いて撮影を行う。撮影したそれぞれの撮像画像に対して、対応するレンズ収差特性値を用いて収差補正を行う。それぞれの収差補正済み撮像画像を用いて1枚の基準画像を生成し、それぞれの収差補正済み撮像画像と基準画像とから、それぞれの収差補正済み撮像画像に対応する推定画像を生成する。そして、それぞれの収差補正前の撮像画像とそれぞれの収差補正済み撮像画像に対応する推定画像との差分に基づいて、1枚の出力画像を生成する。
(もっと読む)
色変換テーブル作成プログラム、色変換テーブル作成プログラムを格納した媒体、及び色変換テーブルの作成方法
【課題】高精度に表色系の値をCMYKの値の組み合わせへ変換できる色変換テーブルの作成プログラム、色変換テーブルの作成プログラムを格納する媒体、色変換テーブルの作成方法を提供する。
【解決手段】色調整システム1000において、第2のコンピュータ10のCPU11は、CMYの3色の値の組み合わせをCMYKの4色の値の組み合わせに変換させたカラーパッチからなる第2のカラーチャートの測定値に基づいて、L*a*b*の値をCMYKの値の組み合わせに変換する第2のLUTを作成する。
(もっと読む)
画像処理装置、画像処理方法
【課題】 拡大後の画像の空間解像度を向上させるための技術を提供すること。
【解決手段】 初期画像生成部202は、第1の画像を第2の画像のサイズに拡大してバッファ206に格納する。重み計算部203はこの拡大画像のエッジ強調画像を生成する。更新量計算部207は、バッファ206内の格納画像内の画素値の変化を表す値にエッジ強調画像の画素値により重み付けした評価値、格納画像を第1の画像のサイズに縮小して画質を劣化させた画像と第1の画像との差異を示す評価値、の合計を極小化する。更新量計算部207は、この極小化を実現する、格納画像に対する更新量を求め、加算器208は、求めた更新量を用いて格納画像を更新する。
(もっと読む)
撮像装置、手ブレ補正方法、プログラム
【課題】暗い部分の画質を維持したままで、撮影画像に生じる手ブレに起因した被写体ブレを低減する。
【解決手段】撮影時の露光時間内に、撮像素子から、分割色(G成分)の画素データ501を複数回の分割露光により時分割で複数読み出し、位置合わせ加算する。同一の露光時間内に非分割色(R成分、B成分)の画素データ502,503を通常の一括露光で読み出し、分割色の画素データ501の位置合わせ情報に基づき補正する。加算後の分割色の画素データ501aと補正後の非分割色の画素データ502a,503aとを結合し、RGBの全色成分からなる画素データ504を生成する。全色成分からなる画素データを分割露光した後、位置合わせ合成する場合に比べ、合成後の画素データのS/N比が向上する。
(もっと読む)
撮像装置、撮像方法、およびプログラム
【課題】撮像画像信号からノイズを除去する。
【解決手段】異なる位置に設けられた複数のレンズで被写体を撮像する撮像装置であって、複数のレンズのそれぞれを介して被写体の画像を撮像して複数の撮像画像信号を生成する撮像部と、複数の撮像画像信号からノイズを除去した複数の実空間画像信号を生成するノイズ除去部とを備え、ノイズ除去部は、複数の撮像画像信号を空間周波数領域の信号に変換して、複数の空間周波数信号を生成する空間周波数信号生成部と、予め定められた空間周波数における複数の空間周波数信号の差を示す差分値を算出する差分算出部と、差分値に基づいて複数の空間周波数信号を補正した複数の補正信号を生成する補正信号生成部と、複数の補正信号を実空間領域の信号に変換して、複数の実空間画像信号を生成する実空間画像信号生成部とを有する撮像装置を提供する。
(もっと読む)
61 - 80 / 810
[ Back to top ]