
Fターム[5B057CH08]の内容
画像処理 (340,757) | 処理部 処理装置、処理システム (15,018) | 演算器 (6,373) | 特定演算 (2,091)
Fターム[5B057CH08]の下位に属するFターム
フィルタリング、積和演算 (1,281)
Fターム[5B057CH08]に分類される特許
21 - 40 / 810
画像検査装置、画像形成装置、画像検査装置の制御方法及び画像形成システム
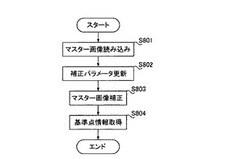
【課題】画像形成出力による出力結果を読み取った画像とマスター画像とを比較することによる画像の検査において、装置の稼動状況の経時変化による画像の位置ずれを補正し、画像の比較に要する処理の負荷を低減すること。
【解決手段】画像形成装置によって紙面上に画像形成出力された画像を読み取った読み取り画像の検査をページ毎に行う画像検査装置であって、マスター画像において設定された基準点周囲の画像を、読み取り画像において検索することにより読み取り画像における基準点を抽出し、マスター画像及び読み取り画像夫々における基準点の位置の差異に基づいて補正パラメータを算出し、前ページまでの画像の検査において算出された補正パラメータに基づいてマスター画像を補正し、基準点抽出の際、補正パラメータに基づいて補正されたマスター画像と読み取り画像において前記基準点を抽出することを特徴とする。
(もっと読む)
画像処理装置及び画像処理装置の制御方法

【課題】ダイナミックレンジを拡大するため、多重露光撮影によって得られた画像を加算するによる場合において、撮像条件によらず露出オーバーとならないように制御する。
【解決手段】多重露光装置において、撮影モードに応じて、複数の画像を画素値比較によっていずかの画像の画素値を選択して合成を行う合成処理と、複数の画像を加算あるいは減算により合成を行う合成処理を切り替える。
(もっと読む)
奥行き信号生成装置、擬似立体画像生成装置、奥行き信号生成方法、および擬似立体画像生成方法
【課題】ランダムノイズが増加しやすい感度で撮影された画像についても違和感の無い擬似立体像を生成する装置及び方法を提供する。
【解決手段】奥行き信号生成装置は、画像信号Sraw(Ssc)と前記画像信号が撮影された時の感度情報Iisoとを取得する入力信号取得部21と、前記感度情報に基づき画像信号に含まれるノイズを低減させるための低減強度値Nnrを生成する強度値調整部251と、低減強度値Nnrに基づき前記画像信号に対してノイズ低減処理を施すノイズ低減部252と、感度情報Iiso及びノイズ低減部252によりノイズ低減された画像信号Snrに基づき、画像信号Snr中の各画素の奥行き情報を示す奥行き信号D_totalを生成する奥行き信号生成部23とを有する。
(もっと読む)
画像形成装置及び画像形成システム
【課題】複数種類のスクリーンに対するガンマ補正テーブルの更新時間の短縮化を図りながら全体としてのキャリブレーション精度の低下を抑制する画像形成装置及び画像形成システムを提供する。
【解決手段】少なくとも1つのスクリーンを適用して画像出力されたパッチパターンの濃度の測定を行わせる測定処理部22と、前記測定された濃度及び前記出力特性の補正による目標出力濃度間の変動を判断する変動判断部23と、前記判断された変動と予め設定された前記スクリーン相互間での変動の相関を示す変動予測式とに基づき前記パッチパターンのスクリーン以外の他のスクリーンによる変動を予測する変動予測部25と、前記測定された濃度及び前記予測された変動に基づく濃度からガンマ補正テーブルを更新する更新部27とを備える。
(もっと読む)
フィルタリング処理回路とそれを有するマッチング回路
【課題】簡単な回路構成で高速にフィルタリング処理を行う。
【解決手段】異なる視点での2つの画像に対する複数のずれ量に対応する差分絶対値和のうち,最小差分絶対値和を抽出するフィルタリング処理回路であって,入力回路に入力される複数のずれ量にそれぞれ対応する複数の差分絶対値和が当該入力時点までで最小の差分絶対値和の場合に最小の差分絶対値和として保持する最小差分絶対値和保持回路と,次に小さい第2最小差分絶対値和を検出して保持する第2最小差分絶対値和検出回路と,入力時点までで最小の差分絶対値和でない場合には,当該入力差分絶対値和を第2最小差分絶対値和検出回路に入力し,最小の差分絶対値和である場合には,最小差分絶対値和保持回路で最小差分絶対値が更新されることに伴って最小差分絶対値和保持回路から出力される元の最小差分絶対値和を,第2最小差分絶対値和検出回路に入力するセレクタ回路とを有する。
(もっと読む)
印刷用データの生成装置、印刷装置およびその方法
【課題】ドットの形成位置にずれが生じると、想定した画質を実現することが困難となる。
【解決手段】画像を形成する各画素の階調値に基づいて、ドット形成の有無を表すドットデータを生成する際、印刷条件が異なる複数の画素グループに属する各ドットを共通領域で重ねて印刷するものとし、共通領域において形成されるドットの分布に、空間周波数領域において、所定の空間周波数以下の低周波領域より高周波側にピークを持つノイズ特性を持たせる。印刷時に用紙サイズを判断し、用紙サイズが大きい場合には、複数の画素グループのうちの2つの画素グループにそれぞれ属する第1,第2の画素にドットが形成される確率k1,k2が、
k1<0.5、k2<0.5
である所定の階調範囲において、第1,第2の画素が共通領域において隣接画素である場合、隣接画素の双方にドットが形成される確率Kが、k1・k2に近づくように設定する。
(もっと読む)
画像処理装置および画像処理方法
【課題】独立成分分析(ICA)を用いたノイズ除去処理では、被写体像の細かなテクスチャ成分までもが除去されてしまう。
【解決手段】基底画像生成部304で、入力画像に基底変換を施して互いの相関が小さい複数の基底画像を生成し、ヒストグラム生成部305で基底画像毎に画素値の1次元ヒストグラムを生成する。回復LUT生成部307で、該ヒストグラムと入力画像のノイズ特性データを用いて、ノイズ混入前後の画素値を対応づけるLUTを生成する。基底画像回復部308で、該LUTを用いて画素値をノイズ混入前の画素値に補正し、逆基底変換部309で逆基底変換を施してノイズ除去された出力画像を生成する。これにより、被写体像の細かなテクスチャ成分を保存したノイズ低減処理が、より少ないメモリ量によって実現される。
(もっと読む)
非接触式高分解能の手形取り込みのための装置及び方法
【課題】異なる複数の焦点距離の各々において対象の手の手形画像全体を取り込むための非接触式手形取り込みのためのシステム及び方法を提供する。
【解決手段】、画像取り込みデバイス(14)は、撮像カメラ(32)と、偏向状態に基づいた様々な光路長を伴う複数の光変調素子(42)及び偏向感受型光学素子(40)を有する電気光学配列(34)と、を含む。該デバイスに対して異なる焦点距離の各々において手形画像を取り込ませるように制御システム(38)を画像取り込みデバイス(14)に結合させており、ここで各手形画像は冗長な手形画像データが取り込まれるように隣接する焦点距離における手形画像の焦点深度と重複した焦点深度を有する。制御システム(38)は、各手形画像を位置データと位置合わせすると共に、異なる焦点距離で取り込んだ手形画像から合成手形画像を作成している。
(もっと読む)
3次元形状モデル高精度化方法およびプログラム
【課題】被写体を撮影した画像と背景のみを撮影した画像から、被写体3次元モデルを高精度に復元する方法を提供する。
【解決手段】各カメラの被写体シルエット画像から視体積交差法により復元されるVisual Hullの表面に存在するボクセルのオブジェクトらしさに関する尤度を算出し、オブジェクトらしさに関する尤度をもとにVisual Hullの整形を行い、Visual Hullの整形が収束するまで、算出と整形を繰り返し適用する。上記のVisual Hullから獲得される3次元形状モデルのテクスチャ状態を評価し、3次元形状モデルのテクスチャ状態をもとに3次元形状モデルの整形を行い、3次元形状モデルの整形が収束するまで、評価と整形を繰り返し適用する。
(もっと読む)
測色装置、撮像装置、記録装置、測色方法及びプログラム
【課題】安価で、かつ、容易に測色の精度を高くすること。
【解決手段】基準チャートを構成する複数の色を、デバイスに依存しない所定の色空間の測色値として記憶した記憶部56と、基準チャートと、測色対象の被写体と、を同時に撮像し、基準チャートのRGB値と、被写体のRGB値と、を取得する撮像部42と、RGB色空間上において被写体のRGB値を内包する多面体の頂点を構成する基準チャートの少なくとも4点のRGB値を検索するRGB値検索部534と、基準チャートの4点のRGB値を、4点のRGB値に対応する記憶部56に記憶された測色値に変換する線形変換マトリックスを算出する線形マトリックス算出部535と、線形変換マトリックスを基に、被写体のRGB値を、所定の色空間の被写体のRGB値に対応する測色値に変換する測色値算出部531と、を有する。
(もっと読む)
画像理装置および方法、並びにプログラム
【課題】違和感のないより自然な画像を得ることができるようにする。
【解決手段】奥行き制御信号生成部は、入力画像における被写体の奥行き位置に応じて、質感の強調度合いを制御する奥行き制御信号を生成する。顔肌領域制御信号生成部は、入力画像における各領域の顔肌らしさに応じて、質感の強調度合いを制御する顔肌領域制御信号を生成し、人物領域制御信号生成部は、入力画像における各領域の人の領域らしさに応じて、質感の強調度合いを制御する人物領域制御信号を生成する。制御信号合成部は、奥行き制御信号、顔肌領域制御信号、および人物領域制御信号を合成して、制御信号を生成し、画像処理部はこの制御信号に基づいて、入力画像の質感調整を行なう。本発明は、画像処理装置に適用することができる。
(もっと読む)
ノズル外観検査装置、およびノズル外観検査方法
【課題】ノズル穴に生じる欠陥の種類を特定可能なノズル外観検査装置、およびノズル外観検査方法を提供すること。
【解決手段】ノズル外観検査装置100は、ノズル穴の開口部の画像を取得する画像入力手段60と、画像の二値化画像を生成する二値化手段61と、二値化画像からノズル穴の内輪郭および外輪郭を検出する輪郭検出手段62と、内輪郭の近似円である内輪郭近似円および外輪郭の近似円である外輪郭近似円を算出する近似円算出手段63と、内輪郭および外輪郭と内輪郭近似円および前記外輪郭近似円とを比較して、内輪郭および外輪郭の形状の特徴を示す特徴フラグを内輪郭および外輪郭上の各点に対して設定するフラグ設定手段64と、特徴フラグに基づいて欠陥の種類を示す欠陥フラグを設定し、欠陥の種類とその位置を検出する欠陥検出手段65と、を具備する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び撮像装置
【課題】被写体が移動していても、実際の顔部に顔部を検出するための領域を合わせること。
【解決手段】撮像時刻の異なる連続した複数の画像データのそれぞれから被写体の顔部に対応する第1の画像領域を検出する顔検出部と、前記顔検出部により検出される前記第1の画像領域から前記顔部内の少なくとも1つの器官に対応する第2の画像領域を検出する器官検出部と、前記顔検出部により検出される前記複数の画像データ上での前記顔部の移動位置に追従して前記器官検出部により検出される前記少なくとも1つの器官の前記画像データ上での画像位置を補正する顔部補正部とを具備する画像処理装置である。
(もっと読む)
ステレオカメラ装置、視差画像生成方法
【課題】広い視野角と視野内の特定領域では高い測距精度を両立したステレオカメラ装置を提供すること。
【解決手段】二つの撮像手段C0、C1と、画像データを等距離射影画像に投影する二つの光学系21と、二つの等距離射影画像から第一の変形画像データ及び第二の変形画像データを生成する第一の画像生成手段31,33と、二つの等距離射影画像の所定領域から第三の変形画像データ及び第四の変形画像データを生成する第二の画像生成手段32,34と、第一の変形画像データと第二の変形画像データから第一の視差画像を生成する第一の視差画像生成手段35と、第三の変形画像データと第四の変形画像データから第二の視差画像を生成する第二の視差画像生成手段36と、第一の変形画像データと第三の変形画像データの倍率により定まる第一の視差画像の画素の画素値を、第二の視差画像の画素の画素値で置き換える画像合成手段37と、を有する。
(もっと読む)
医用画像処理装置
【課題】ブルズアイマップの診断能の向上。
【解決手段】記憶部11は、心臓の機能指標に関する3次元の機能画像データを記憶する。心筋領域抽出部15は、3次元の機能画像データから心筋領域を抽出する。正規化部17は、心筋領域の内壁と外壁との間の距離を既定の数値範囲で正規化する。ブルズアイマップ生成部21は、既定の数値範囲内の所定値に対応する心筋領域上の位置の画素値の空間分布を、2次元の極座標で表現するブルズアイマップを生成する。表示部23は、ブルズアイマップを表示する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】精度の高いサブピクセルレベルの対応点を推定する。
【解決手段】2つの画像の一方を基準画像、他方を参照画像としてマッチングブロックを行うためのブロック形状を設定するブロック形状設定手段と、前記ブロック形状設定手段により設定されたブロック形状に基づいて、前記基準画像におけるブロック位置を設定する基準画像ブロック位置設定手段と、前記参照画像において、前記基準画像ブロック位置設定手段により設定されたブロック位置に対応する位置の近傍に複数のブロックを設定する参照画像ブロック位置設定手段と、前記基準画像内に設定されたブロックと、前記参照画像ブロック位置設定手段により設定された複数のブロックとの相関評価値を算出する評価値演算手段とを有し、前記ブロック形状設定手段は、前記基準画像の含まれる対象物の形状に応じて前記ブロック形状を設定することにより上記課題を解決する。
(もっと読む)
画像処理装置、画像形成装置、画像処理装置の制御方法、及び画像処理装置の制御プログラム
【課題】木目調のノイズの発生を防止し、比較的に高い画質で誤差拡散法による画像処理を行うことができ、コストがかかる光量調整を行わずに速やかに印字を実行可能にできる画像処理装置を提供する。
【解決手段】画像処理装置は、入力データに対して誤差拡散処理を行って低値化し、例えば2つの光源を用いて像担持体に潜像を形成する画像形成装置で画像形成が行われる出力データを出力する。画像処理装置は、2値化結果記憶部63により、注目画素の周辺の所定の範囲の画素についての処理結果を記憶し、処理結果に基づいて、ドットカウント部65により2つの光源のそれぞれに対応する領域毎にドット数に関するカウント値を求める。また、基準値算出部61により、注目画素の濃度に応じて基準値を取得し、反転処理部55において、カウント値と基準値とに基づいて、注目画素についての誤差拡散処理の処理結果を強制的に反転し、出力データを出力する。
(もっと読む)
デジタル画像の色属性を処理し特徴付けするためのバイオインスパイアード・システム
【課題】デジタル画像の色属性を処理するための、コンピュータに実装可能なバイオインスパイアード・システムを提供する。
【解決手段】デジタル画像の色属性を処理するための、コンピュータに実装可能なバイオインスパイアード・システムであって、霊長類の網膜の機能をエミュレートする秩序構造を備え、データ入力部により受け取られる元のデジタル画像と分析から、その元のデジタル画像内の色属性を検出し、その元のデジタル画像内の色属性を表すデータの集合により形成される、その元のデジタル画像の各画素について規定される出力情報を生成し、そのシステムは仮想的な網膜を構成するエミュレータ群を有し、各エミュレータはパラメータ化されており、出力信号群のうちの第1色チャネル(a)、第2色チャネル(b)を生成し、双極細胞エミュレータ群は、水平細胞エミュレータ群を介して、出力信号群のうちの第3チャネル(A)を生成する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び、波形データ処理装置
【課題】画像処理を規定するパラメータを適正に調整する。
【解決手段】CPU11は、文字列を構成する少なくとも1つの文字の認識が失敗したか否かを判定する成否判定部113と、成否判定部113によって文字列を構成する少なくとも1つの文字の認識が失敗したと判定された場合に、文字の認識が失敗した原因を推定する原因推定部116と、原因推定部116によって推定された原因に基づいて、画像処理を規定する複数のパラメータのうち、推定された原因に対応する少なくとも1つのパラメータの値を修正する処理修正部117と、を備える。
(もっと読む)
画像処理システム、画像処理装置、方法、プログラムおよび記録媒体
【課題】偏光カメラや撮影対象物、光源の位置関係に関わらず、偏光カメラの撮影画像に含まれる撮影対象物の検出精度を向上させる画像処理システム、画像処理装置、方法、プログラムおよび記録媒体を提供すること。
【解決手段】本発明の画像処理装置は、偏光カメラが生成した水平偏光画像および垂直偏光画像からこれらの画像の輝度情報および偏光度情報を生成し、当該輝度情報から形成されるモノクロ画像の粒状性情報を算出すると共に、当該偏光度情報から形成される偏光度画像の粒状性情報を算出する。そして、画像処理装置は、これらの輝度情報、偏光度情報および粒状性情報を使用して、偏光カメラが生成した画像に含まれる対象物を検出する。
(もっと読む)
21 - 40 / 810
[ Back to top ]