
Fターム[5B057CH08]の内容
画像処理 (340,757) | 処理部 処理装置、処理システム (15,018) | 演算器 (6,373) | 特定演算 (2,091)
Fターム[5B057CH08]の下位に属するFターム
フィルタリング、積和演算 (1,281)
Fターム[5B057CH08]に分類される特許
81 - 100 / 810
画像処理装置、画像処理方法、および画像処理プログラム
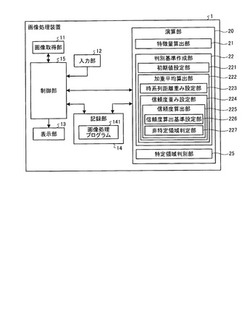
【課題】撮像対象を時系列で撮像した一連の時系列画像を構成する画像内の特定領域を精度良く判別すること。
【解決手段】本発明のある実施の形態の画像処理装置1は、時系列画像を構成する画像の中から時系列順に従って選択した処理対象画像内の特定領域を判別するための判別基準を作成する判別基準作成部22と、処理対象画像の分割領域毎の特徴量を算出する特徴量算出部21と、分割領域毎の特徴量をもとに、判別基準を用いて処理対象画像内の特定領域を判別する特定領域判別部25とを備える。そして、判別基準作成部22は、既に処理を終えた画像内で判別された特定領域の特徴量をもとに、判別基準を作成する。
(もっと読む)
画像処理装置および画像処理方法

【課題】ディザマトリクスの幅が1ワードを超える奇数画素分であっても、ディザ閾値を記憶する記憶媒体にシングルポートの記憶媒体を用いて並列処理ができるようにする。
【解決手段】ディザマトリクスの主走査方向に連続する各ディザ閾値のうち、1ワード分のディザ閾値をSRAMの第1のアドレスに書き込み、1ワードを超えるディザ閾値を第2のアドレスに書き込む。ディザマトリクスの主走査方向の幅が奇数画素数分である場合に、主走査方向に連続する各ディザ閾値のうち先頭のディザ閾値と、第1のアドレスの末尾に書き込まれたディザ閾値とを、第2のアドレスに書き込まれた1ワードを超えるディザ閾値の次に書き込む。
(もっと読む)
画像処理装置及び画像処理方法
【課題】画像データを複数の処理単位に分けて画像処理を行う場合における処理速度の高速化が可能となる画像処理装置及び画像処理方法を提供する。
【解決手段】複数ライン分のデータであるベルトを処理単位として、DMAR4によるメモリ3からのベイヤーデータの読み出し、ベイヤ補間ブロック5によるYUVデータの生成、変倍ブロック6による画素数の増減、DMAW7によるメモリ3への書き込み(展開)の複数段のデータ処理を繰り返す。その間、制御部2が、各ブロック4〜7が次のベルトの処理に使用する次ベルト情報aをDMAW7の起動タイミングで生成し各ブロック4〜7へ出力し、各ブロック4〜7が起動する毎に出力中の次ベルト情報aが各ブロック4〜7のレジスタ8に書き込まれ、各ブロック4〜7が起動する毎に更新された次ベルト情報aに従ってデータ処理を行う。ベルトを処理単位とする複数段階のデータ処理を間断なく繰り返して行い得る。
(もっと読む)
車両周辺監視装置及び車両周辺監視方法
【課題】障害物を短時間で検出する車両周辺監視装置及び車両周辺監視方法を提供する。
【解決手段】実施形態によれば、車両よりも後側を含む第1、第2領域211、221の複数の第1、第2フレーム画像データを取得する第1、第2データ取得部110、120と、障害物推定処理部130と、を備えた車両周辺監視装置が提供される。障害物推定処理部は、第1フレーム画像データに基づいて第1領域に存在する第1障害物を推定し、第2フレーム画像データに基づいて第2領域に存在する第2障害物を推定する。第2障害物の推定に関する条件は、第1障害物の推定結果に基づいて変更される。
(もっと読む)
画像処理装置及び画像処理方法
【課題】出力装置用の画像データを生成する画像処理装置であって、色補正を含む色変換処理を小規模なハードウェア構成で実行することのできる画像処理装置等を提供する。
【解決手段】入力画像データを出力装置用の画像データに変換する画像処理装置が、入力画像データに対して、色補正処理と色空間の変換処理とを、所定色数の色毎に実行する色補正データ生成回路と、入力画像データを複数回色補正データ生成回路に転送するために保持する遅延回路と、入力画像データに対する補正処理及び変換処理の処理後のデータを、所定色数の色毎に収めた色補正テーブルを記憶するメモリとを有し、色補正データ生成回路は、上記処理を、対応する色補正テーブルを用いて実行し、出力装置で用いられる色数が所定色数よりも多い場合には、全色についての処理を、遅延回路から転送される入力画像データを用いて、複数回の処理で実行する。
(もっと読む)
画像処理方法、画像処理プログラム、画像処理装置、及び撮像装置
【課題】輝点の波長スペクトルデータや撮影光学系の結像特性データなどの撮影条件データを使用せずとも、撮影画像からフレア成分の情報を高精度に抽出する。
【解決手段】本発明の画像処理方法の一態様は、撮影光学系により取得された処理対象画像を入力する入力手順と、前記処理対象画像のうちフレアの発生領域に含まれる理想的な輝点像成分を推定する推定手順(S183)と、前記発生領域から、フレア成分を含む実際の輝点像成分を抽出する抽出手順(S182)と、前記理想的な輝点像成分と前記実際の輝点像成分との間の相違を、前記発生領域に含まれるフレア成分の指標として算出する算出手順(S184)とを含む。
(もっと読む)
画像処理装置
【課題】本発明は撮像手段により撮像して得られた撮像対象の動画像におけるフレーム画像を取得し、取得されたフレーム画像間での前記撮像対象の濃度の動きをベクトルで表現するオプティカルフローを算出する画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、前記フレーム画像における前記撮像対象のエッジを抽出し、該エッジを構成する所定点でのオプティカルフローを算出し、算出された所定点でのオプティカルフローから該所定点の奥行きを算出し、前記所定点での奥行きにFOEのY座標からの距離に応じて変化する変数を乗算して補正奥行きを算出し、前記補正奥行きから所定点における三次元情報を復元する。
(もっと読む)
内視鏡画像補正装置および内視鏡装置
【課題】異なる照明光で撮像された画像情報であっても、同じ色調となる分光推定画像を生成できるようにし、診断精度を向上させる。
【解決手段】
分光推定画像生成手段69により内視鏡第一観察画像と内視鏡第二観察画像の分光推定画像をそれぞれ生成するにあたり、内視鏡第一観察画像に対しては、分光推定画像生成手段69が所定の波長セットに応じて第一分光推定画像を生成し、内視鏡第二観察画像に対しては、波長セット設定手段が、第一光源からの照射光のスペクトルを近似的に生成する近似波長セットを設定し、分光推定画像生成手段69が、設定された近似波長セットに応じて第二分光推定画像を生成するよう構成した。
(もっと読む)
撮像装置、画像処理装置、および画像処理プログラム
【課題】画像復元時のリンギングを抑え、かつ高感度の撮像を可能にする。
【解決手段】複数の撮像素子(310a、310b)と、露光時間中、時間符号化パターンに従って、入射光を各撮像素子(310a、310b)に順次入射させる光学素子(光入射部)315と、露光時間中に発生する手振れを検出し、手振れの軌跡を示す手振れ情報を生成する手振れ検出部345と、複数の撮像素子(310a、310b)によって取得した複数の画像を処理する画像処理部220とを備える。画像処理部220は、手振れ情報および時間符号化パターンに基づいて、各画像の手振れによるぼやけを規定する点広がり関数を決定するPSF決定部と、点広がり関数を用いて各画像を復元する画像復元部と、復元された複数の画像を合成する画像合成部とを有する。
(もっと読む)
顔マスキング装置及び方法
【課題】常に適切なマスキングが行える顔マスキング装置及び方法を提供する。
【解決手段】画像ウインドウ抽出部103は、入力画像から少なくとも2つの画像ウインドウを抽出し、スコア算出部104は、抽出された画像ウインドウ内の顔の確からしさを示すスコア値を算出し、比較器105は、算出されたスコア値を所定のスコア閾値Aと比較し、その結果に応じて顔検出領域を設定し、顔群領域判定部106は、比較器105で設定された顔検出領域間の距離を所定の距離閾値Aと比較し、その結果に応じて顔検出領域を含む顔群領域を設定する。比較器105及び顔群領域判定部106は、スコア値がスコア閾値A以上の1又は複数の領域を包括する範囲を顔群領域範囲として判定するので、人物の顔の一部が隠蔽、顔同士が近接していた場合においても、従来技術において発生していたマスキングミスを抑制でき、顔領域を的確にマスキングすることができる。
(もっと読む)
倍率色収差・像歪補正装置およびそのプログラム
【課題】本発明は、簡易な構成で正確な補正が可能な倍率色収差・像歪補正装置およびそのプログラムを提供する。
【解決手段】倍率色収差・像歪補正装置1は、補正データ生成手段2と、補正データを記憶する補正データ記憶手段6と、補正データが複数入力されると共に、補正データ記憶手段6の記憶容量又は所定の評価値に基づいて補正データの記憶数を算出し、入力された補正データを記憶数以下に間引いてから補正データ記憶手段6に書き込む補正データ間引き手段3と、信号入力手段4と、レンズパラメータ入力手段5と、補正データ記憶手段6と、補正データ選定手段7と、補正量算出手段8と、収差補正手段9と、信号記憶手段10と、信号出力手段11とを備える。
(もっと読む)
位置姿勢計測装置
【課題】 対象物体と非対象物体の像を含む距離画像データを入力として対象物体の位置姿勢を推定する処理の高速化、及びメモリ消費量の軽減を目的とする。
【解決手段】 物体を撮影した距離画像上で物体に相当する物体領域に基づいて、該物体の位置姿勢を計測する。そのために、距離画像の領域を分割した部分領域群のうち少なくとも1つの部分領域を物体領域として設定する。物体領域に物体の形状モデルを当て嵌めて、物体の位置姿勢を推定する。当て嵌めの誤差に基づいて、物体領域を更新する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】シームカービングにおいて、計算コストを低減させつつ、ピクセルずれを抑制できるようにする。
【解決手段】全画像探索部31は、入力画像の隣接する画素間のエネルギーに基づいて、入力画像エネルギーマップを縮小した縮小画像エネルギーマップより縮小シームを探索し、部分画像探索部32に供給する。部分画像探索部32は、入力画像エネルギーマップのうち、全画像探索部31により探索された縮小シームに属する画素を起点とする部分シーム候補を探索し、積算エネルギーが最小となる部分シームを探索する。加工部16は、探索された部分シームに属する画素を入力画像より削除、または挿入することにより、入力画像を縮小、または拡大する。本発明は、画像処理装置に適用することができる。
(もっと読む)
位置姿勢推定装置及びその方法
【課題】 物体・撮影環境において、安定的に物体の位置及び姿勢を計測することを目的とする。
【解決手段】 物体を撮影した撮影画像を入力する。物体の3次元座標を含む距離画像を入力する。撮影画像から画像特徴を抽出する。画像特徴に対応する距離画像上の位置における3次元座標から、画像特徴が物体の形状を表すか否かを判別する。物体の形状を表すと判別された画像特徴と物体の形状を有する3次元モデルの一部とを対応付ける。対応付けに基づいて、物体の位置姿勢を推定する。
(もっと読む)
量子化およびデータ埋め込みのための対称格子のクラス
【課題】電子透かしが入れられたイメージに対して行い得る攻撃のタイプを考慮した電子透かしシステムを提供する。
【解決手段】量子化およびデータ埋め込みのシステムを示す。700は計算システム、702はマーキングコンポーネント、704は変換コンポーネント、706は線形統計ジェネレータ、708は格子量子化器、710は電子透かしジェネレータ、712は電子透かし埋め込み器、714は電子透かしレシーバである。電子透かしが入れられるべきイメージに変換が適用され、そのイメージに関連した統計情報が計算される。計算された統計情報は対称格子を使用して量子化され、そしてその格子量子化された統計情報を使用して電子透かしが計算される。次に、電子透かしがイメージに挿入される。
(もっと読む)
カメラ装置、カメラ装置用プログラム、および、画像マッチング方法
【課題】計算コストを増大させずに高精度な画像マッチングを実現するカメラ装置、カメラ装置用プログラムとこれを記録した記録媒体、および、画像マッチング方法を提供する。
【解決手段】複数のカメラ100からそれぞれ出力された複数の画像を取得する画像取得手段110、111と、画像取得手段が取得した複数の画像内において複数の画素を包含する同一サイズのウィンドウを設定し、ウィンドウを比較することにより、各画像における対応する箇所を検索する対応箇所検索手段120、121、130、131、140と、を有し、対応箇所検索手段は、複数のカメラの基線長方向の長さのみが異なる複数種類のウィンドウを用いて対応する箇所を検索する。
(もっと読む)
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】高速道路のサービスエリアなど、多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】本発明の駐車検出装置1は、複数の駐車マスを含む駐車検出対象エリアの画像を撮影する撮影手段(カメラ10)と、所定の画像処理を施す画像処理手段(エッジ抽出処理部24)と、駐車検出対象エリアの画像に所定の画像処理を施した判定対象データ(エッジ抽出処理画像データ23c)と、予め駐車マス毎に設定された判定の基準となる判定基準データ23dと、を比較して車両の有無を判定する判定手段(相関率算出部25、相関率判定処理部26)と、を備え、判定基準データは、表示パターンが撮影された駐車検出対象エリアの画像から取得した表示パターンを含む画像領域に所定の画像処理を施したデータであることを特徴とする。
(もっと読む)
画像処理回路、半導体装置、画像処理装置
【課題】黒帯部分を含む入力画像に対しても適切な輝度変換処理を施して所望の出力画像を生成する。
【解決手段】画像処理回路は、入力画像を構成する複数の画素を輝度値毎または所定の輝度範囲毎にカウントして輝度ヒストグラムを取得し、これに基づく輝度変換係数を算出する輝度変換係数算出部12と、前記入力画像を構成する各画素に対して、前記輝度変換係数に応じた輝度変換処理を施す輝度変換処理部11と、前記入力画像を構成する各画素毎に、各々の輝度値が所定の閾値TH以下であるか否かを判定する低輝度画素判定部15と、輝度変換係数算出部12で前記輝度ヒストグラムを取得する際、低輝度画素判定部15でその輝度値が閾値TH以下であると判定された低輝度画素のカウント値を前記輝度ヒストグラム内で分散させる低輝度画素分散部16とを有する構成とされている。
(もっと読む)
画像処理システム
【課題】暗黙知になっている配色ルールをデジタル化することで、規則的な色の配列を画像処理に適用することができ、配色の大きな変更を含みつつ統一感のとれた画像処理を行うことができる画像処理システムを提供する。
【解決手段】画像処理システム200は、任意のデジタル画像である入力画像00を入力する入力部10と、色座標値並びに色の数及び色の順番が予め規則化された配列型の色座標情報を格納する色配列データベース20と、色配列データベース20の色座標情報をもとに色階調分布であるグラデーションパレットを作成するパレット部30と、入力画像00の各画素をパレット部30で作成した色階調分布の色座標と比較し指定条件に基づいて置換する画像処理部40と、を有する。
(もっと読む)
対応点探索装置
【課題】ステレオカメラを用いて得られた2つの画像についての対応点探索処理において、遠近競合を抑制した対応点探索装置を提供する。
【解決手段】ステレオカメラSCで得られた画像データが入力される画像入力部11と、画像入力部11から出力される画像データに対して、解像度変換を行う解像度変換部12と、解像度変換された画像データに対して対応点探索を行うためのポイント設定を行うポイント設定部13と、ポイント設定された画像データに対して多重解像度処理のための視差を設定するための視差設定部14と、ポイント設定された画像データに対して、ウインドウを設定するウインドウ設定部15と、ウインドウが設定された画像データに対して対応点探索処理を実行する対応点探索処理部16とを備えている。
(もっと読む)
81 - 100 / 810
[ Back to top ]