
Fターム[5B057DC22]の内容
Fターム[5B057DC22]の下位に属するFターム
濃淡ヒストグラム (1,167)
Fターム[5B057DC22]に分類される特許
141 - 160 / 3,614
画像処理装置、電子機器
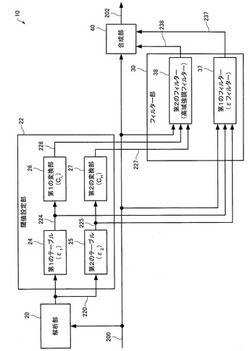
【課題】 回路規模を小さく抑えながらも、複数のフィルターの出力を合成した画像が不自然にならない画像処理装置を提供する。
【解決手段】 フィルター部30と、フィルター部30が含むフィルターのフィルター処理に関する閾値を設定する閾値設定部22と、を含み、フィルター部30は、第1のフィルター37と、第1のフィルターの入力信号を1階微分した信号を入力信号とする第2のフィルター38と、を含み、閾値設定部22は、第1のフィルターの閾値に基づいて、第2のフィルターの閾値を定める。
(もっと読む)
制御装置、画像形成装置、及び制御方法

【課題】テストプリント紙の仕分け作業をユーザーに強いたり、測色できなかった色の再現性を悪化させたりすることなく、多次色を長期間に渡って精度良く再現する。
【解決手段】画像の中から、測色するのに適した測色適応領域を探索してから(S5)、画像情報に基づいて形成した多次色トナー像における複数の測色適応領域をそれぞれ測色し(S6)、複数の測色結果について色分を求めた結果に基づいて、その差分をより小さくするように階調再現曲線TRCを補正し(S13)、且つ、その補正に先立って、複数の測色結果における色分布上での偏りの有無を判定し(S10)、偏りがある場合には、互いにトナー付着量が異なる複数のテストトナー像からなる階調パターン像を4色分形成し、それぞれのテストトナー像のトナー付着量を検知した結果を色情報に変換して、変換結果を測色結果として実際の測色結果のデータ群に加える(S11)。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】撮像画像から四辺形領域の画像の抽出を効率良く行う。
【解決手段】撮像装置100であって、撮像部1により撮像された撮像画像の画像データを取得する画像取得部4aと、取得された撮像画像の画像データに基づいて、当該撮像画像内で明るさが所定周期で変化する明るさ変化領域を検出する明るさ変化領域検出部4bと、取得された撮像画像の画像データに対して直線を検出する直線検出処理を施して、明るさ変化領域に対応する対応領域に含まれる直線を特定する直線特定部4cと、撮像画像内で特定された直線を含んで構成される四辺形領域を抽出候補領域として特定する候補領域特定部4dと、を備えている。
(もっと読む)
画像処理装置、画像処理方法及び撮像装置
【課題】ずれ量算出にかかる処理時間を短縮することのできる画像処理装置を提供する。
【解決手段】異なる位置から撮影され、複数の画素が2次元の行列状に配列された右眼画像PR及び左眼画像PLが格納されるメモリ51と、N行目の各画素に対応する切り出しブロックBRを右眼画像PRから切り出し、左眼画像PLの処理領域の全水平領域から比較ブロックBLを行方向に1画素ずつ移動させて切り出すメモリ制御部53を有する。また、切り出された各比較ブロックBLと切り出しブロックBRとを比較して輝度信号の差分絶対値和を算出するSAD演算部54と、各切り出しブロックBR毎に差分絶対値和の最小値に基づいてずれ量を算出する比較器55を有する。さらに、N+1行目の画素に対するずれ量算出処理の際に、N行目において算出された差分絶対値和に基づいて比較ブロックBLの処理領域内での移動範囲を絞るように設定する演算制御部56を有する。
(もっと読む)
目視対象物判定装置、目視対象物判定方法および目視対象物判定プログラム
【課題】目視者の目視する対象物を正確に判定すること。
【解決手段】目視者1の画像データを基にして、目視者1の視線1aを検出し、視線1aの先の視点位置1bを算出する。目視対象物判定装置100は、表示装置10に表示される対象物10A〜10Cの特徴を取得する。目視対象物判定装置100は、目視者の視点位置1bおよび対象物10A〜10Cの距離と、各対象物10A〜10Cの特徴とを基にして、各対象物が目視者に目視されているか否かを判定する。
(もっと読む)
3次元測定装置、3次元測定方法及びプログラム
【課題】測定対象物が明るさ(色)の異なる複数の領域を有している場合に、適切にその測定対象物を3次元測定することができる3次元測定装置等の技術を提供すること。
【解決手段】本技術の一形態に係る3次元測定装置は、投影部と、撮像部と、制御部とを具備する。前記投影部は、照度を変化可能な照明を有し、前記照明からの光により測定対象物に縞を投影する。前記制御部は、前記撮像部により前記測定対象物の画像を撮像させ、撮像された前記測定対象物の画像から輝度値を取得し、取得された前記輝度値に基づいて、前記測定対象物に対して複数の検査ブロックを割り当て、割り当てられた前記検査ブロック毎に、前記照明の測定照度を決定し、決定された前記測定照度で、それぞれ、前記投影部により前記検査ブロックに対して縞を投影し、前記縞が投影された前記検査ブロックの縞画像を前記撮像部により撮像し、撮像された前記縞画像に基づいて前記測定対象物を3次元測定する。
(もっと読む)
画像処理装置
【課題】 平均濃度保存処理を、高速、高スループットで実行可能な画像処理装置を提供する。
【解決手段】 隣接する2つの画素データを同じクロックで取得し、注目画素直前の量子化結果が確定する前に平均濃度値を想定することにより、各画素データに対するNの2乗個の平均濃度算出処理をあらかじめ行う。注目画素直前の量子化結果が確定したのち、確定した量子化結果を基づき各画素データに対する平均濃度値を選択することにより、平均濃度保存処理に用いる平均濃度値算出に必要な処理時間を削減し、隣接する2つの画素データに対する平均濃度保存処理を行うことを可能にする。
(もっと読む)
画像処理装置及び画像処理方法
【課題】入力解像度が異なる場合でも、100%近傍の高濃度領域での文字や細線画像のつぶれ抑制効果や、中間調の文字や細線画像のジャギー感の低減効果に違いが現れるのを抑制することを可能とした画像処理装置及び画像処理方法を提供する。
【解決手段】画像データからエッジ部か否かの判定を行うエッジ判定手段102と、前記エッジ判定手段102の判定結果に基づいて前記画像データのエッジ領域を広げてエッジ部と再判定するエッジ再判定手段103と、前記エッジ判定手段102及び前記エッジ再判定手段103によってエッジ部であると判定された画像データと、非エッジ部であると判定された画像データとで異なる処理を施す処理手段105と、前記画像データの入力解像度に基づいて前記エッジ再判定手段103による再判定処理の内容を変更する変更手段104とを備えるように構成した。
(もっと読む)
撮像装置
【課題】 システム構成を複雑化させることなく、撮影中の視野を全焦点画像上の適切な位置に表示させることができる撮像装置を提供する。
【解決手段】 カメラの焦点位置を変更する焦点位置変更手段と、焦点位置を変更して取得された2以上の静止画像を合成する全焦点画像生成手段と、全焦点画像、又は静止画像に基づいて抽出される画像を基準画像として当該基準画像とフレーム画像とから特徴量を抽出する特徴量抽出手段と、特徴量の比較によって、基準画像とフレーム画像間の相対位置を判定するライブ位置合わせ手段と、外部からの取込み指示を受け付けた際に、焦点位置の異なる2以上の静止画像を取得する静止画像取得手段と、取得した静止画像を合成することにより全焦点画像生成手段が生成した新たな全焦点画像と、過去に取得した全焦点画像とを連結してモザイク画像を生成するモザイク画像生成手段とを備える。
(もっと読む)
画像処理装置およびその制御方法
【課題】 簡易な方法でスクリーン処理(組織的ディザ法)を適切に補正し、良好なハーフトーン処理結果を出力する。
【解決手段】 前記入力画像データをスクリーン処理するスクリーン処理手段と、前記入力画像データにおける注目画素に対して、前記スクリーン処理手段によって生成されたスクリーン画像データにおいてモアレが発生しているか否かを判定する判定手段と、前記注目画素において、前記判定手段による判定結果に応じて、スクリーン画像データを構成するスクリーン画素値か、前記スクリーン画像データのうち前記判定手段によりモアレが発生していると判定された画素を、前記入力画像データを構成する入力画素値に置換した中間データを生成した後、前記中間データに基づき前記入力画素値を印刷可能な画素値に変換した値、のいずれかを印刷可能な画像データにおける前記注目画素の値として出力する出力手段とを有することを特徴とする。
(もっと読む)
画像処理装置及び画像処理方法、並びにプログラム
【課題】リアルな水墨画により近い画像を得ること。
【解決手段】原画像取得部51は、原画像のデータを取得する。特徴領域検出部61は、原画像のデータから、特徴領域を検出する。筆運びパターン決定部62は、筆運びパターン記憶部71に予め記憶されている、少なくとも2種類以上の筆運びパターンのデータの中から、特徴領域に対して適用する筆運びパターンのデータを決定する。筆運びパターン変換部63は、決定された筆運びのパターンのデータに基づいて、特徴領域中の原画像のデータを変換する。
(もっと読む)
撮像装置及びこれを備えた物体検出装置、並びに、光学フィルタ及びその製造方法
【課題】受光素子1画素程度の微小領域ごとに領域分割された偏光フィルタ層や分光フィルタ層を積層した構造を実現することを課題とする。
【解決手段】画像センサ206の前段に配置される光学フィルタは、特定方向の偏光成分Pのみを選択して透過させる鉛直偏光領域と該特定方向とは異なる方向の偏光成分Sのみを選択して透過させる水平偏光領域とが撮像画素単位で領域分割された偏光フィルタ層222と、赤色波長帯の光のみを選択して透過させる赤色分光領域と波長選択を行わずに光を透過させる非分光領域とが撮像画素単位で領域分割された分光フィルタ層223とを、光透過方向に積層した構成を有し、積層方向下側に位置する偏光フィルタ層の積層方向上面の凹凸を充填材224で充填して平坦化した後に分光フィルタ層を形成したものである。
(もっと読む)
画像処理装置、情報処理装置、方法、プログラムおよび記録媒体
【課題】投影画像の明度補正におけるユーザビリティを向上させると共に、投影画像の視認性を向上させることが可能な画像処理装置、情報処理装置、方法、プログラムおよび記録媒体を提供すること。
【解決手段】本発明の画像処理装置は、白色画像を投影し、投影された画像を撮影して撮影画像を生成し、撮影画像の明度の高い領域および明度の低い領域を特定する。そして、画像処理装置は、撮影画像に含まれる明度の高い領域の明度を、撮影画像に含まれる明度の低い領域の明度に漸次的に変更して投影画像の明度を補正し、明度を補正した投影画像と、明度の変更に対してユーザの意思表示する方法を示す画像とを投影する。また、画像処理装置は、撮影画像に含まれる明度の低い領域を提示する画像を生成して投影する。
(もっと読む)
画像計測装置及びコンピュータプログラム
【課題】計測結果が計測対象物のどの部分のどの計測結果であるのかを使用者が的確に把握することができる画像計測装置及びコンピュータプログラムを提供する。
【解決手段】撮像手段で取得した計測対象物の画像を表示し、表示された画像上で特徴画像、及び計測位置の指定を受け付ける。指定を受け付けた特徴画像と、計測位置及び該計測位置を示す寸法線の表示位置を表す、特徴画像に対する相対位置に関する情報とを記憶しておく。新たに取得した計測対象物の画像と記憶してある特徴画像とを照合し、計測対象物の画像の姿勢及び位置に関する情報を特定する。姿勢及び位置が特定された計測対象物の画像に対して計測位置を設定し、該計測位置のエッジ部分を検出して、所定の物理量を計測する。記憶された寸法線を表示する特徴画像に対する相対位置に関する情報に基づいて、計測位置を示す寸法線及び計測結果を所定の位置に表示する。
(もっと読む)
環境認識装置及びプログラム
【課題】環境認識の精度を向上させることができる環境認識装置及びプログラムを提供すること。
【解決手段】被写体を撮像することにより得られた画像を、明度情報に基づき同一の物体である可能性が高い領域に分割し、同一の分割領域に存在する複数の特徴点となる画素の距離情報に基づいて、特徴点以外の画素の距離情報を補完して距離画像を生成し、注目画素の距離情報に基づいて特徴量を抽出するためのウインドウのサイズを変更し、該ウインドウ内の画素から注目画素の特徴量を抽出し、抽出した特徴量と予め求めておいた対象物毎の特徴量とを比較することにより画素毎に物体を識別し、分割領域内の画素の識別結果を統合して、分割領域毎に対象物を識別して環境認識を行う。
(もっと読む)
接近障害物検出装置及びプログラム
【課題】光源が自車両に接近することを検出して警告する接近障害物検出装置を提供する。
【解決手段】路面反射した光が、光源を起点として、撮影カメラの方向に延びる縦長の楕円形に類する形状を有することに着目して、路面湿潤時に自車両周辺を撮影した画像より、高輝度領域追跡部25が特定の形状からなる高輝度領域の位置及び動きの時間的な変化を検出する。そして、光源接近判定部29は、撮影画像において縦長楕円形で現れる路面反射部分の時間的な移動方向をもとに、自車両に接近してくる光源(自車方向に接近する障害物)を検出する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】 簡単な処理で、且つ適切に画像を解析することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】 オリジナル画像を縮小する縮小し、当該縮小で得られた縮小画像を拡大する。また、オリジナル画像を拡大する。そして、縮小画像の拡大で得られた第1の拡大画像と、オリジナル画像の拡大で得られた第2の拡大画像とを比較することにより、オリジナル画像を解析する。
(もっと読む)
画像形成装置及びその制御方法、並びにプログラム。
【課題】自動階調補正を実施することで大きく出力画質が変化してしまう場合、ユーザーが許容できる変化量か容易に確認できるようにすること。
【解決手段】予め決められた入力濃度値に対して、生成された補正LUTを用いて出力した場合の出力濃度と、現在設定されている設定LUTを用いて出力した場合の出力濃度とをユーザーインターフェース上に表示する。そして、ユーザーインターフェースを介するユーザー入力に応じて使用するLUTを決定する。
(もっと読む)
車両検出装置、車両検出システム及びコンピュータプログラム
【課題】輝度変化が少ない場合でも精度よく所定の警告灯を点滅している車両の検出を行うことができる車両検出装置、車両検出システム及びコンピュータプログラムを提供する。
【解決手段】時間差分画像生成部103は、撮像時点が異なる複数の撮像画像の画素値の差分に基づいて時間差分画像を時系列に複数生成する。一致・不一致判定部107は、時間差分画像生成部103で生成した時間差分画像のうちの直近の時間差分画像と他の時間差分画像との所定の画素ブロックの一致/不一致を判定する。車両検出部108は、一致/不一致判定部107で判定した一致/不一致の遷移回数に基づいて車両を検出する。
(もっと読む)
移動体検出装置、移動体検出システム及びコンピュータプログラム
【課題】従来よりもさらに精度良く移動体を検出することができる移動体検出装置、移動体検出システム及びコンピュータプログラムを提供する。
【解決手段】鳥瞰画像生成部103は、透視変換行列を用いて撮像画像を複数の画素で構成される鳥瞰画像に変換する。移動体候補領域抽出部104は、鳥瞰画像の画素値に基づいて、鳥瞰画像上で移動体候補領域を抽出する。移動体検出部107は、抽出された移動体候補領域の境界の近傍で列状をなす列状画素それぞれの位置から所定の向きで走査した所定数の画素のうち、移動体候補領域内に含まれる画素数に基づいて、列状画素を移動体の一部として検出する。
(もっと読む)
141 - 160 / 3,614
[ Back to top ]