
Fターム[5B057DC23]の内容
Fターム[5B057DC23]に分類される特許
61 - 80 / 1,167
信号処理装置、信号処理方法、および信号処理プログラム
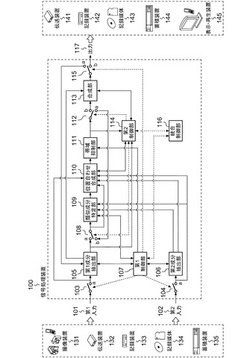
【課題】処理対象としている画像と参照として利用する画像との間で画像品質が異なっている場合であっても、本来あるべき画像の特徴に近い画像を生成することができる技術を提供する。
【解決手段】信号処理装置100において、第1成分抽出部105は、画像信号処理の処理対象となっている画像領域に含まれる信号から、所定の信号を選択的に抽出して処理対象となる抽出成分情報を生成するとともに、抽出成分情報以外の成分を抽出外成分情報として分離する。類似成分特定部109は、所定の特定方法に基づいて処理対象となっている画像領域とは異なる領域を特定し、特定した異なる領域に含まれる信号から抽出成分情報を生成して、処理対象の抽出成分情報と置き換えることで抽出成分情報の再構成処理をする際の初期の基準信号を生成する。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム

【課題】従来よりも多様な画像に適用でき、かつ、時間的なロバスト性が従来よりも高い幾何補正用情報を生成することが可能な、新規かつ改良された画像処理装置等を提供する。
【解決手段】画像処理装置は、同じ被写体が描かれた第1の画像及び第2の画像のうち、第2の画像を構成する第2の画素を、第1の画像を構成する画素のうち、第2の画素に対応する第1の画素が近接するエピポーラ線に変換する変換行列をフレーム毎に算出し、かつ、現フレームの変換行列を前フレームの変換行列に拘束させる。
(もっと読む)
手の判定方法、手の判定装置および自動車における車載機器の操作装置
【課題】 操作者の手およびステアリングハンドルを白・黒に的確に2値化して手の判定精度を高める。
【解決手段】 第1工程で、マークM1が手Hで隠されたときのステアリングハンドルSの所定領域RC,RL,RRの明度ヒストグラムを作成し、第2工程で、明度ヒストグラムの二つの山部の間に白・黒を判定する明度の閾値を設定し、第3工程で、閾値よりも明度が高い領域を白の領域であると判定する。よってステアリングハンドルSの明度に対して手Hの明度が相対的に高ければ、ステアリングハンドルSを黒に、且つ手Hを白に確実に2値化できる適切な閾値を設定することができ、白の領域を手Hであると判定することで判定精度を大幅に高めることが可能となる。
(もっと読む)
画像処理装置、画像形成装置およびプログラム
【課題】画像データに対して幾何変換処理を行った場合に、画素値がほぼ一定な領域に発生するすじ状の濃度むらの発生を防ぐ。
【解決手段】サブピクセル座標値算出部34は、原画像に対して回転処理が指示された場合に、回転処理後の画像の各画素に対応するサブピクセルの原画像における座標値を算出する。判定部33は、サブピクセル座標値算出部34により座標値が算出されたサブピクセル(仮想画素)が含まれる4画素×4画素の判定領域内の16の画素の画素値のばらつき度合いを判定する。画素値決定部35は、判定部33により判定された判定領域内の複数の画素の画素値のばらつき度合いに基づいて、回転処理後の画像における各画素の画素値を、原画像の判定領域内の16の画素の画素値から算出するのか、その判定領域内の特定の1つの画素の画素値を選択するのかを切り替えて決定する。
(もっと読む)
バックライト駆動装置、画像表示装置、画像処理装置
【課題】本発明は、様々な種類の入力画像について、その画質や視認性を高めることが可能なバックライト駆動装置を提供することを目的とする。
【解決手段】バックライト駆動装置は、液晶ディスプレイ300に表示される入力画像の輝度に関する情報を取得する輝度検出部100と、輝度検出部100の検出結果を反映して、液晶ディスプレイ300のバックライト制御を行う駆動部200と、を有して成る。
(もっと読む)
エッジ点抽出装置、車線検出装置、およびプログラム
【課題】 低い処理負荷で車線を良好に検出できるエッジ点抽出装置、車線検出装置およびプログラムを提供する。
【解決手段】 画像処理ECU32は、カメラ30から取得した路面画像から画素グループを選択する(S2)。次に、画素グループの各画素の色成分ごとに平均輝度値を算出する(S3)。平均輝度値が第1閾値以上の色成分があれば、その中で最大のものを除いて残りの色成分に基づき輝度値変換し(S4,S5)、平均輝度値が第2閾値以下の色成分があれば、その中で最小のものを除いて残りの色成分に基づき輝度値変換し(S6,S7),または全ての色成分を用いて輝度値変換する(S8)。S5,S7,S8で変換した輝度値パラメータからエッジ点を抽出し(S9)、エッジ点に基づきエッジ線の抽出を行い(S11)、エッジ線から車線位置を算出する(S12)。
(もっと読む)
画像処理装置、画像処理方法、および制御プログラム
【課題】種々の条件において撮影された顔画像における唇の色を特定し、特定した唇の色を用いて唇の領域を特定することができる画像処理装置および画像処理方法を実現する。
【解決手段】本発明に係る画像処理装置6は、人物の口を含む顔画像から唇の特徴を特定する画像処理装置であって、顔画像の肌の代表色を特定する肌代表色特定部17と、顔画像において、少なくともいずれかの領域が唇の一部を含むように複数の領域を設定し、各領域の代表色を候補色として特定する候補色特定部18と、肌の代表色と、各候補色との色相および彩度における差に応じて、複数の候補色から唇の代表色を特定する唇代表色特定部19とを備える。
(もっと読む)
フォトプリンティングのための顔領域検出装置及び補正方法
【課題】改善された画質のフォトプリンティングのために、映像データから顔領域を検出して補正する方法を提供する。
【解決手段】映像データを映像処理装置に入力する映像データ入力段階(S100)と、前記入力された映像データから肌色領域を抽出し、顔存在候補領域から顔画像または回転された顔画像を検出する顔領域検出段階(S200)と、前記顔領域検出段階で検出された顔領域を分割する領域分割段階(S300)と、前記領域分割段階を通じて分割された領域から、歪曲されたデータ値を抽出して補正する補正段階(S400)と、前記補正段階を経て最終的に補正された映像データを視覚的に出力するフォトプリンティング段階とからなり(S500)、フォトプリンターで印刷する前に、顔映像の多様な歪曲を効果的に補正することができるため、さらに改善された画質を有する顔映像を印刷することができるようになる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 画像の階調補正を輝度低周波成分を用いた補正とトーンカーブ補正に分配して行い、ユーザの好みを反映した良好な明るさ及びコントラストの画像補正結果を得る。
【解決手段】 顔の輝度値に基づき算出した目標値とユーザの操作入力に応じて設定された補正レベルに応じて、撮影画像の輝度成分画像の低周波成分画像を用いた第1の階調補正処理の補正量とトーンカーブ補正による第2の階調補正処理の両方の補正量を決定する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】画像感性値の処理に関する画像処理装置及び画像処理方法を提供する。
【解決手段】処理対象画像と、所定の感性値が定められた複数の訓練画像との各々のマッチング度を算出するマッチング度算出部と、前記複数の訓練画像から、前記処理対象画像とのマッチング度が最高となる所定数の訓練画像を抽出し、該所定数の訓練画像の選定された感性種別に関する感性値に基づいて、前記処理対象画像の感性値を算出する感性値算出部と、を含む画像処理装置が提供される。
(もっと読む)
画像処理装置、画像処理方法
【課題】個々の画像に適した良好な輝度補正を定量的に行なうことができる画像処理装置および画像処理方法を提供する。
【解決手段】原画像の推定照明光成分を算出する照明光成分推定部と、推定照明光成分を補正した補正推定照明光成分を出力する推定照明光成分補正部と、原画像の輝度成分を補正推定照明光成分で除算することで輝度成分を補正するレチネックス処理部とを備え、推定照明光成分補正部は、推定照明光成分の最低輝度側から最高輝度側までの値を複数の区分に分割した度数分布の第1閾値以上の区分において、第2閾値以上の度数値を有する最低輝度側区分を求め、求めた区分の最小輝度値以上の推定照明光成分値を補正推定照明光成分の最大値に補正する画像処理装置。
(もっと読む)
画像検査装置、画像検査方法、及びコンピュータプログラム
【課題】検査対象領域を撮像して取得した多値画像の明暗が変化した場合であっても、非検出対象物であるノイズを効果的に除去し、検出対象物であるブロブ(集合体)状の傷、汚れ等の欠陥の有無、大きさ、形状等を検査する画像検査装置、画像検査方法、及びコンピュータプログラムを提供する。
【解決手段】検査対象領域の多値画像を取得し、取得した多値画像の濃度情報に基づいて基準濃度値を算出する。多値画像の各画素の濃度値と算出した基準濃度値との差分を画素ごとに算出し、基準濃度値の変化に追従して変化するように基準濃度値に対して相対的に閾値を設定して記憶する。算出した差分が閾値より大きい複数の画素を抽出し、抽出された複数の画素の輝度値の連結性に基づいて画素の集合体を特定し、特定された画素の集合体に対して、差分を用いた特徴量を算出する。算出した特徴量に基づいて、特定された画素の集合体の欠陥を判別する。
(もっと読む)
印刷用データ作成装置、印刷用データ作成方法、プログラム及び記録媒体
【課題】印刷を行うための版データの作成時に画像の光沢部のようなクリアトナーを乗せる部分の指定を自動的に行うことができる印刷用データ作成装置の提供。
【解決手段】データを保持するメモリー20と、印刷用の画像データをメモリー20に入力する画像入力部10と、画像データの表示を行う画像表示部30と、メモリー20に記憶されている光沢検出用画像分割数に応じて画像データを部分画像に分割する画像分割部81と、部分画像の輝度データから歪度を算出する歪度算出部82と、歪度をメモリー20に記憶されている光沢検出用閾値と比較して判定する閾値判定部83と、閾値判定部83の判定結果に基づいて光沢検出を行う光沢検出部80と、光沢検出部80により光沢が検出された部分画像について、輝度の高い部分にクリアトナーを乗せる領域のマーカーを、輝度の低い部分にクリアトナーを乗せない領域のマーカーを自動的に設定するマーカー自動設定部90と、マーカーに基づいて自動的に領域分割を行う領域分割部50と、を備えて構成される。
(もっと読む)
画像処理装置及びこれを備えた画像形成装置
【課題】分散値に着目して裏写り除去処理を行い、画像データから適切に裏写り部分を除去する。
【解決手段】画像処理装置は、原稿の画像データを装置に入力するための画像入力部と、画像データに含まれる画素のうち、注目画素を定める注目画素設定部と、注目画素設定部により定められた注目画素を含む一定範囲の領域の分散値を求める分散値演算部と、分散値演算部の演算結果が、予め定められた分散基準値以下のとき、注目画素を裏写り画素と定める裏写り画素設定部と、裏写り画素設定部により定められた裏写り画素に対して、裏写り除去処理を行う裏写り補正部と、を含む。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】主被写体よりも他の被写体がハイライト部分を多く占めるようなシーンで、主被写体を適切に階調補正できるようにする。
【解決手段】まず、入力画像の階調数の分布を算出し、算出された分布に応じて、階調補正する領域を前記入力画像の全領域か、前記入力画像からハイライトの部分領域を除いた領域かを判定する。そして、ハイライトの部分領域を除いて階調補正する場合には、前記入力画像を複数の部分領域に分割し、前記分割された部分領域ごとに階調数の分布を算出する。次に、前記入力画像から算出された分布に基づいて定められる第1の値と、部分領域ごとに算出された分布を代表する第2の値とを比較し、前記第2の値が前記第1の値より大きいと判定された部分領域を除いた画像領域を用いて画像全体の階調補正を行う。
(もっと読む)
画像処理装置及び画像処理装置の制御方法
【課題】 画像の領域ごとの輝度、彩度、色相の変化量によってシーン判定することによって、シーンの判定精度を高め、誤判定の頻度を少なくすることを可能にした画像判定装置、及びそれを用いた画像処理装置を提供する。
【解決手段】 画像データの撮影された画像のシーン判定を行う画像処理装置であって、画像データを小領域ごとのブロックに分割し、ブロック毎の輝度、色相、彩度から、輝度、色相、彩度の少なくとも一つについて、隣接するブロック同士の変化量を評価する評価値を算出する。この評価値に基づいて、前記画像データの画像のシーンを判定することを特徴とする構成とした。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より簡単かつ迅速に診断のための診察用動画像を得ることができるようにする。
【解決手段】観察位置検出辞書生成部22乃至観察順序生成辞書生成部24は、任意の医用画像から、注目すべき観察位置や、それらの観察位置の観察すべき順序などを得るための各辞書を生成する。診察用動画像生成部25は、生成された各辞書を用いて、入力された医用画像から、観察位置を検出するとともに、それらの観察位置を観察すべき順序と観察パラメータを特定する。そして、診察用動画像生成部25は、各観察位置が、特定された順序および観察パラメータで表示される診察用動画像を生成する。本発明は、画像処理装置に適用することができる。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】 平滑化フィルタをベースとするノイズ低減技術では、被写体像の高周波成分も抑圧されてしまい、細かなテクスチャ成分が除去されてしまうという課題があった
【解決手段】 撮像部により取得された入力画像データを入力し、入力画像データに基づいて、入力画像データの入力ヒストグラムを生成し、入力画像データの示す画像中の画素の特徴を決定し、ノイズ特性データと入力ヒストグラムと画素の特徴とに基づいて、入力画像データを補正する。ノイズ特性データは、注目画素の特性値の理想値が、複数の特性値の各々である確率に応じたデータである。
(もっと読む)
画像処理装置およびその制御方法
【課題】自動的に検出された主被写体領域を追尾するにおいて追尾性能を向上する。
【解決手段】画像処理装置は、動画像のフレームからユーザの関心が高い被写体の領域である主被写体領域を検出し、その主被写体領域内の特定の位置を主被写体位置として取得する。そして、画像処理装置は、追尾処理で用いられるテンプレートを生成するための参照範囲を、取得された主被写体位置に基づいて、上記主被写体領域とは無関係に、フレームにおいて設定し、設定された参照範囲の画像情報に基づいて、主被写体位置を追尾するためのテンプレートを生成する。その後、画像処理装置は、生成したテンプレートを用いて、上記フレームに後続するフレームについて追尾処理を実行する。
(もっと読む)
マップ変換方法、マップ変換装置及びマップ変換プログラム
【課題】3次元画像の表示に関し、再現可能な奥行き範囲内でより良好な奥行き感を得られるように奥行きマップを変換可能なマップ変換技術を提供する。
【解決手段】マップ変換装置は、3次元画像の表示に関し、入力画像の一部の画素を含む画像領域の奥行きを画素毎に示す奥行きマップを用いて、奥行きの存在頻度の累積を表す累積ヒストグラムを算出し、当該累積ヒストグラムを用いて、入力画像における奥行きマップを、出力先における奥行き範囲内の奥行きを画素毎に示す奥行きマップに変換する。
(もっと読む)
61 - 80 / 1,167
[ Back to top ]