
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
2,561 - 2,580 / 2,719
撮像装置

【課題】 フラッシュ撮影時においては、撮影画面内の被写体からの反射光量データをもとに調光制御を行っているため、撮影画面内に高反射率もしくは低反射率の被写体が存在した場合には、その影響を受け、適切な調光ができないことがある。
【解決手段】 プリ発光前後において得た撮影画像信号からそれぞれ被写体の顔領域の検出を行い、その得られた撮影画像信号の顔領域同士で輝度演算を行うことで、顔領域を中心とした領域で調光制御を行い、高反射率又は低反射率の物体が撮像画面内に含まれる場合であってもその影響を受けることのなく、顔領域が好適な露出となるように発光制御を行う。
(もっと読む)
画像読み取り装置およびシェーディング補正方法

【課題】 画像読み取り手段として密着イメージセンサを用い、白基準部材として白色ローラを用いる場合でも、白色ローラから得たシェーディングデータを、白基準原稿を読んだ際のデータと等しくなるように補正することで、品質の高い画像読み取りができる画像読み取り装置を提供する。
【解決手段】 画像読み取り装置において、原稿上の画像を読み取る第2画像読み取りユニット4に対向した第2読み取りローラ12の白板面を読み取った読み取りデータを用いて第1の白シェーディングデータを生成すると共に、白基準原稿を読み取った読み取りデータを用いて第2の白シェーディングデータを生成するシェーディングデータ生成回路41、第1の白シェーディングデータと第2の白シェーディングデータを比較して2つの白シェーディングデータの差分を検出する比較回路44、その差分を用いて第1の白シェーディングデータを補正するシェーディングデータ補正回路45を備えた。
(もっと読む)
映像データの補正方法
【課題】 メモリの容量や、画像処理負荷を増やすことなく、手ぶれを含む映像データの画質劣化を防ぐことが可能な映像データの補正方法を提供する。
【解決手段】 映像データを構成する各フレームを処理対象フレームFとして、直前フレームPからの移動量を算出し(S1)、移動量算出時に、処理対象フレームFと直前フレームPが連続フレームであると判断される場合には(S2)、処理対象フレームFから手ぶれによるブラーを除去するための静止画補正を行って補正フレームF´を得る(S3)。さらに、初期フレームIに対する累積移動量を算出し(S4)、この累積移動量だけ補正フレームF´を移動した画像を直前のフレームPについての処理済みフレームである直前積算フレームに上書きする(S5)。一方、S2で連続フレームでないと判断された場合には、処理対象フレームFを初期フレームIおよび直前フレームPに設定する。
(もっと読む)
多重同期ビデオストリームからの動的奥行き復元
複数台のカメラからの画像のシーケンスの動的奥行きマップを生成する方法は、カラーに基づく画像セグメンテーションによって誘起された3次元区分的に平坦な表面パッチの集合によってシーンをモデル化する。この表現は、3次元幾何、運動、及び大域的な可視性制約が空間と時間に亘って実施される増分解析を使用して連続的に評価される。提案されたアルゴリズムは、空間カラー整合性制約を組み込むコスト関数と、滑らかなシーン運動モデルとを最適化する。  (もっと読む)
(もっと読む)
画像処理装置および画像処理方法
【課題】遠景や近景といった画像に写し出された景色に左右されず、無限遠におけるオプティカルフローを推定する。
【解決手段】ステレオカメラ(カメラ2,3)は、移動体に搭載されており、移動体周囲の景色を撮像することにより、一対の画像データを時系列的に出力する。ステレオ画像処理部7は、一対の画像データを処理対象とした二次元マッチングに基づいて、視差dを算出し、これにより、距離データDを出力する。認識部11は、距離データDに基づいて、複数の立体物Onを認識し、立体物Onのそれぞれの三次元位置を特定。検出部12は、一対の画像データのうちの一方の画像データにおいて、時系列的な前後関係にある一対の画像データを処理対象とした二次元マッチングに基づいて、立体物のそれぞれのオプティカルフローOFを検出する。そして、演算部13は、複数の立体物Onの並びと、それぞれの立体物Onの視差dとオプティカルフローOFとに基づいて、無限遠におけるオプティカルフローOFinfを推定する。
(もっと読む)
データ秘匿化装置、秘匿データ抽出装置、データ秘匿化方法、秘匿データ抽出方法及びこれらのプログラム
【課題】 画像に埋め込まれた秘匿情報の秘密性を高めることができるデータ秘匿化装置を提供する。
【解決手段】 データ秘匿化装置は、媒体画像710の最下位ビットに秘匿画像720を埋め込み、秘匿画像720が埋め込まれた媒体画像710’に対して、キー画像を参照して予測符号化を行う。このキー画像は、パスワードに対応するノイズが最下位ビットに配置された画像であり、媒体画像710’の最下位ビットにのみスクランブルがかけられる。したがって、このキー画像を参照せずに符号データが復号化されると、元の媒体画像710’と酷似する媒体画像710”が生成されるが、この媒体画像710”の最下位ビットは、スクランブルがかけられた秘匿画像720となる。
(もっと読む)
フラクタル画像圧縮の符号化量低減装置
【課題】 符号化による画質劣化をきたすことなく、符号化量を低減できるフラクタル画像圧縮の符号化量低減装置を提供することにある。
【解決手段】 原画像10は、画像分割・抽出部1でレンジブロックに分割され、かつ該レンジブロックは1つずつ抽出されて、シェード/エッジブロック判定部2および最適ドメインブロック決定部3に送られる。探索距離指定部4は前記レンジブロックがエッジブロックであった場合の、ドメインブロックの探索距離または探索範囲を指定する。最適ドメインブロック決定部3は該指定された探索範囲内から最適ドメインブロックを決定する。レンジブロックデータ作成部5は、前記レンジブロックがシェードの場合には符号化情報として輝度情報を作成し、一方エッジの場合には、対応するドメインブロックの位置情報(近傍領域)、輝度変換情報、回転・反転変換情報、細分化情報を作成する。
(もっと読む)
フィルムの検査装置
【課題】 フィルム中に分散する粒子の種々の分散特性を正確に検査することができるフィルムの検査装置を提供する
【解決手段】 粒子が分散された光透過性フィルムの一面側に配される光源(照明200)と、このフィルムの他面側に配されて前記フィルムの透過画像を取得する受像手段(カメラ100)を有する。また、受像手段で得た原画像から微細粒子を顕在化させて微細粒子顕在画像を作成する微細粒子顕在化手段350と、原画像から粗大粒子を顕在化させて粗大粒子顕在画像を作成する粗大粒子顕在化手段360とを有する。そして、微細粒子顕在画像と粗大粒子顕在画像から検査画像を作成する検査画像作成手段370と、検査画像中の粒子の特性を演算する特性演算手段380とを有する。
(もっと読む)
半透明表面を有するスクリーンとともに使用されるユーザ入力の装置、システム、方法、およびコンピュータ・プログラム
【課題】 スクリーンの反対側を見るカメラによって生成されるイメージの処理によって、ユーザが半透明スクリーンの表面のどこにいつ触れたかの検出を可能にするユーザ・インターフェース入力の装置および方法を提供する。
【解決手段】 装置は、半透明スクリーンと、ユーザとの相互作用が行われる第2の側と反対のスクリーンの第1の側を結像するように配置された画像取込デバイスと、画像取込デバイスの出力に結合された画像プロセッサであって、スクリーンの第2の側の領域に人が接触した場所または時間のうちの少なくとも1つを、接触領域から発する光の周囲の領域に対する強度の変化によって判定するための画像プロセッサを備える。
(もっと読む)
医用運動解析装置、医用運動解析方法および医用運動解析プログラム
【課題】 心臓病の診断に有用な心臓の収縮/拡張方向の運動成分およびねじれや回転などの運動成分を解析できるようにする。
【解決手段】 主成分分析部104は、速度ベクトル取得部103で得られる心臓の輪郭上の追跡点の時系列速度ベクトルデータを主成分分析して、追跡点の運動の第1成分方向および第2成分方向を求めて、それぞれ第1運動成分算出部105および第2運動成分算出部106に送る。第1運動成分算出部105および第2運動成分算出部106は、それぞれ速度ベクトル取得部103で得られる追跡点の速度ベクトルデータの第1成分方向の運動成分および第2成分方向の運動成分を算出する。速度ベクトルの第1成分方向の運動成分および第2成分方向の運動成分は、表示部107において表示される。
(もっと読む)
画像信号処理装置および画像信号処理方法並びにプログラムおよびそれを記録した媒体
【課題】所定のオブジェクトの領域とそれ以外の領域との画質を異にする特殊効果を簡単に実現する。
【解決手段】「第2の処理」の機能選択時には、画像信号Vinに対してDRC−ボリウム処理部112で高画質化を行い、この処理部112で得られた画像信号を出力画像信号Voutとする。この場合、処理部112は、出力画像信号Voutとして、画質パラメータの値に応じた画質のものを生成する。画像信号Vinに基づいてオブジェクト抽出処理部113で所定のオブジェクトの領域を示すオブジェクト領域情報OAIを生成し、この情報OAIを処理部112に制御信号として供給する。処理部112は、この情報OAIに基づいて、画質パラメータを局所的に変更し、背景ぼかしの特殊効果処理を行う。
(もっと読む)
撮影画像の変化抽出装置及び方法
【課題】本発明は、オルソ画像だけでなく、異なる撮影位置、照明条件、角度、縮尺で撮影された複数の画像からの変化抽出を可能とする。
【解決手段】比較対照となる画像おのおのからフットプリント情報を抽出して、フットプリント情報を比較することで、変化を抽出する。
(もっと読む)
画像解析支援方法、画像解析支援プログラムおよび画像解析支援装置
蛍光画像および明視野画像または位相差画像の撮影をおこない(ステップS401)。つぎに、撮影された蛍光画像から、細胞位置を検出する(ステップS402)。つぎに、ステップS401において撮影された明視野画像または位相差画像を用いて、明視野でステップS402において位置が検出された細胞の細胞領域を求める(ステップS403)。それによって、細胞領域以外の蛍光部分を除外する(ステップS404)。そして、ステップS404によって除外されて残った細胞領域によって特定される注目細胞のクラスを判定し、それによって当該注目細胞のクラス分けをおこなう(ステップS405)。その後、上記結果に基づいて、レポートを作成する(ステップS406)。 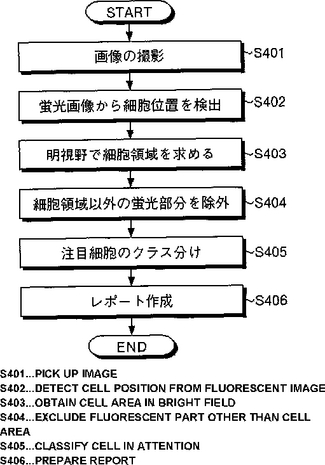 (もっと読む)
(もっと読む)
データ生成装置、データ閲覧システム、データ生成方法およびデータ生成プログラム
【課題】大量の静止画像データを効率良く圧縮した閲覧データを生成するデータ生成装置を実現する。
【解決手段】データの入出力等に関して所定の制御を行う制御部11と、入力された静止画像データに関して差分データの抽出を行う差分データ抽出部12と、抽出した差分データに基づきフレームデータを生成するフレームデータ生成部13と、複数のフレームデータに基づき閲覧データを生成する閲覧データ生成部14と、静止画像データに含まれる識別データを抽出し、識別データを抽出した静止画像データに対応するフレームデータに対して識別データを付加する識別データ付加部15とを備える。また、データ生成装置1は、コメントデータを静止画像データに付加するコメント付加部16と、コメント付加部16によって付加されたコメントデータを含む静止画像データを記録する記録部17とを備える。
(もっと読む)
乳房画像表示装置およびそのプログラム
【課題】 乳房画像の比較読影性能を向上させるための乳房画像表示装置を提供する。
【解決手段】 右乳房撮影画像SAおよび左乳房撮影画像SBより乳房が撮影された右乳房領域および左乳房領域を検出し、検出された右乳房領域と左乳房領域中の予め設定された対応する位置を検出する対応位置手段21、22、・・・、26を複数の備えるようする。1つの対応位置検出手段21、22、・・・、26で右乳房領域と左乳房領域中の対応位置が検出されないときは、他の対応位置検出手段21、22、・・・、26により右乳房領域と左乳房領域中の対応位置を検出する。
(もっと読む)
画像処理装置
【課題】 道路上の撮影画像から、より精度良く車両認識を行うことが可能な画像処理装置を提供する。
【解決手段】 画像処理部は、車両の撮影画像を基に特徴画像作成部51で作成された特徴抽出画像を垂直・水平特徴コード化部54で垂直方向及び水平方向に特徴をコード化し、この特徴抽出データについて、車幅条件の車両判定値に基づいて幅小データ等を水平特徴結合部61で結合するとともに、幅大データを幅大データ分離部62で分離して補正する。その後、車両認識部66で特徴補正データによって車尾検出、車長算出、車体確定を行う。また、背景差分画像作成部52で作成されたライト検出用の背景差分画像を用いて、ライト検出を行って車尾位置を算出する。そして、車尾確定部69において、車体解析とライト解析によるそれぞれの車尾の検出結果を統合し、車尾位置を確定する。
(もっと読む)
基板検査用ウィンドウの設定条件の決定方法、基板検査方法、基板検査用の検査データ作成方法、および基板検査装置
【課題】 基板検査用のウィンドウの設定条件を簡単に決定できるようにする。
【解決手段】 部品検査機1は、部品実装後基板のモデルを撮像するとともに、前工程の検査機であるはんだ印刷検査機3から同一基板の画像の提供を受ける。そして、これらの画像間の差分演算や差画像の2値化処理により、基板上の各部品を抽出した後、各種部品の標準検査データが登録された部品ライブラリを抽出した部品の大きさにより照合することにより、各部品を特定する。また抽出された部品に応じて部品ウィンドウの設定条件を決定し、その設定条件を部品の特定情報とともに登録する。そして、検査の際には、登録された設定条件に基づき検査対象の部品実装画像上に部品ウィンドウを設定し、そのウィンドウ内の画像データと部品特定情報に対応する標準検査データとを用いて部品の実装状態を検査する。
(もっと読む)
立体内視鏡用表示制御装置
【課題】 適用範囲が広く、立体観察に適した画像表示を行うことができる立体内視鏡用表示制御装置を提供する。
【解決手段】 立体内視鏡における左右に配置された撮像素子によりそれぞれ撮像され、信号処理装置により生成された左右の映像信号Vl,VrはA/D変換器31L,31Rによりデジタル信号に変換された後、画像メモリ33L,33Rに格納される。CPU38は、操作スイッチ39による操作により、視点モードが近点側等に変更されると、その画像メモリ33L,33Rから水平方向に読み出すタイミングを変更して、左右の画像表示素子により表示される左右の画像の表示位置を適正な位置に移動すると共に、共通に表示されない不一致の領域をマスクする制御を行い、立体観察に適した画像表示を行うようにした。
(もっと読む)
表層構造を視覚化するシステム
本発明は、物体(104、204、304)の表層構造を視覚化するシステム(100、200、300)を提供する。本システムは、物体(104、204、304)の複数の画像を撮影するカメラ(106、206、306)と、カメラ(106、206、306)が撮影する各画像に関連するそれぞれのロケーションを監視するロケーションモニタ(108、208、308)とを備える。本システム(100、200、300)はまた、マイクロプロセッサ(112、212、312)と、物体(104、204、304)の表層構造を表示するディスプレイ(114、214、314)と、マイクロプロセッサ(112、212、312)のためのソフトウェアルーチンとを備える。ソフトウェアは、複数の画像を処理するとともに、各画像に関連するそれぞれのロケーションを考慮に入れて、物体(104、204、304)の表層構造をディスプレイにより視覚化できるようにする。 (もっと読む)
表面の生来の視覚的特徴を用いて3次元シーンにおける表面の追跡
対象表面の識別された透視イメージの中の対象表面の3次元位置及び向きを決定する装置が記載されている。対象表面は固有の視覚的特徴を有し、当該視覚的特徴のサブセットが選択される。該装置は、識別された透視イメージより時間的に前にある対象表面の透視イメージにおける選択された視覚的特徴の位置を用いて、識別された透視イメージの中の探索ゾーンを識別する。該装置は、選択された視覚的特徴を求めて識別された探索ゾーンを探索して、その選択された視覚的特徴が生じる2次元位置の決定する。決定された2次元位置に基づいて、該装置は、識別された透視イメージにおける対象表面の3次元位置及び向きを決定する。  (もっと読む)
(もっと読む)
2,561 - 2,580 / 2,719
[ Back to top ]