
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
2,641 - 2,660 / 2,719
画像処理装置及び該画像処理装置を用いた画像監視システム

【課題】 従来の画像監視システムは、監視画像に降雨や降雪等の不要な移動体が映っていてもそのまま監視員に表示しているため、画像が非常に見づらいものになり監視が困難な場合が発生するという課題があった。
【解決手段】 画像処理装置1において、不要移動体除去部3が画像蓄積部2に蓄積させ連続時間で映した連続画像の各画素毎に処理して画像に映りこむ不要な移動体を除去した画像を出力するため、監視員へ降雨雪等の不要な移動体を除去した見やすい監視画像を表示できる。
(もっと読む)
ナンバープレート認識装置及び方法

【課題】
進行方向が切替わる交互通行道路において、上りと下りの2台のナンバープレート認識装置を、1台で実施できるナンバープレート認識装置を提供する。
【解決手段】
車両の画像を撮影する車番認識用カメラ1と、車番認識用カメラ1で撮影された画像を画像処理する画像処理プロセッサ13を有する画像処理装置2を備え、画像処理装置2により車番認識用カメラ1で撮影された2つフレームの画像投影間の像投影差分からテンプレート46を算出し、時間経過後の2つのフレームの画像投影間の画像投影差分からテンプレート46とマッチした領域を検索し、テンプレート46とマッチした領域から移動ベクトル50を計算して前面ナンバープレート認識処理と後面ナンバープレート認識処理を切替える。
(もっと読む)
タンパリングされた画像の配置
メディアコンテントの真正を実証する方法及び装置(8)を提供する。実施の形態によれば、デジタル画像認証に対する正確なタンパリング位置を設ける。典型的には、疑いのある画像はブロックに分割される。各ブロックに対して、画像コンテントの特性を演算した後に前記特性をしきい値によって判断して‘0’又は‘1’を与えることによって認証ビットを発生させる。疑わしい画像の認証ビットは、元の画像の認証ビットと比較される。不整合が存在するとともにコンテントが実際にタンパリングされた場合、タンパリングが検出される。圧縮のような許容される動作に起因する不整合は、誤アラームと称され、それは回避されるべきものである。いわゆるROC曲線(受信機動作特性)は、検出確率と誤アラーム確率との間の関係を与える。認証ビットを決定するために用いられるしきい値は、ROC曲線の動作点を表す。本発明の実施の形態によれば、低い誤アラーム確率に対応する動作点が最初に選択される。タンピング画像領域を更に正確に識別するために、認証決定が、互いに相違する動作点を用いながら隣接ブロックに対して繰り返される。これは、タンパリングブロックが他に見つからなくなるまで継続する。したがって、例えばセキュリティカメラによって取得された画像を認証し及び任意のタンパリング領域を配置するのに有益な向上した配置が行われ、これによって、これら画像の値は、例えば、法廷の証拠として増大する。  (もっと読む)
(もっと読む)
画像処理装置及び推奨度表示方法
【課題】 従来、時系列に並んだ複数の画像のうちの或る画像を用いて所定の画像処理を施し、この画像処理の効果の度合いの高い画像を得ようとする場合、ユーザは、実際に、これら複数の画像の各画像に画像処理を施し、トライアンドエラーで所望の画像を得るようにしていた。そのため、ユーザの負担が大きく、所望の画像を得るまでに相当の時間を要していた。
【解決手段】 時系列に並んだ複数の画像について、各画像毎に所定の画像処理に適した度合いを推奨度として算出する推奨度算出部と、推奨度算出部により算出された推奨度を、各画像の時間的な位置と対応付けてそれぞれ記憶する記憶部と、を備える画像処理装置。
(もっと読む)
ステレオ写真画像の検索方法及び表示方法並びに管理システム
【課題】 ステレオ写真画像の管理、検索を容易に行え立体視及び三次元計測できるようにする。
【解決手段】 同一被写体を重複して撮影した複数の写真画像群からなるデジタルの画像データと標定図データを格納するデータ記憶手段5と、標定図の中に写真画像群のそれぞれの主点及びステレオ立体視を行うのに必要な写真画像のペアとしてステレオ写真画像対の主点同士を結ぶ基線を表示する標定図処理手段1と、ステレオペアの生成、登録、左右画像へのリンク情報の検索を行うステレオペア処理手段3と、ステレオ立体視を可能にするシステムとの通信を行い検索されたステレオペアの画像の情報を送信する立体表示連携処理手段4とを備え、基線又は主点をクリックまたは選択してステレオ写真画像対を検索して立体視及び三次元計測するためステレオ写真画像対を再配置して表示する。
(もっと読む)
2次元画像のコピー画像に領域指定した画像を中間画像とし、3次元画像を形成および体積を測定するシステム
【課題】特徴ある画像の領域指定を行なうことにより、2次元画像の接触・重なりにかかわらず3次元画像を形成し、体積を測定するコンピュータ等のシステムを提供する。
【解決手段】2次元画像をディスプレイに表示しA1、その2次元画像のコピー画像A2を中間画像として領域指定を行ないA3、その領域毎にA4、位置と高さ情報を読み取りA5、領域指定毎3次元画像を形成しA6、体積を測定するA7。A1〜A7の機能を有した3次元画像形成および体積測定システム。
(もっと読む)
指紋照合装置および指紋照合方法
【課題】 全体指紋画像の再構成が不要で、比較演算量を少なくすることが可能な指紋照合装置を提供する。
【解決手段】 ユーザの指がセンサ2に対して相対的に移動すると、センサ2はその指の指紋から互いに異なる複数の部分を順番に読み取り、その読み取った部分に応じた互いに異なる複数の分割指紋画像を読み取った順番に出力する。抽出器3は、センサ2が出力した複数の分割指紋画像から互いの距離が所定値だけ離れた複数の特定部分指紋画像8を抽出し、その抽出した複数の特定部分指紋画像8を特定部分指紋画像メモリ41に格納する。比較器5は特定部分指紋画像メモリ41に格納された特定部分指紋画像8を登録指紋画像メモリ42に格納されている登録指紋画像9と照合する。判定器6は比較器5の照合結果に基づいて特定部分指紋画像8が登録指紋画像9と一致するか否かを判定する。
(もっと読む)
撮像装置
【課題】 マーカ等を必要とせずに非接触且つ現場計測可能であり、また、解析するために高性能のパーソナルコンピュータを必要としないスタンドアローン型の計測機能付きの撮像装置を提供する。
【解決手段】 撮像装置10は、少なくとも2つのディジタルカメラ111,112と、ディジタルカメラ111,112によって撮像された可視画像データに対して各種画像処理を施す画像処理部52と、少なくとも画像データを表示部12に表示させる主制御部54とを備える。画像処理部52は、撮像対象物を平面の集合体であるものと近似して2次元情報を取得する画像解析を、ディジタルカメラ111,112によって撮像された少なくとも2枚の可視画像データに基づいて行い、主制御部54は、画像処理部52によって算出された当該可視画像データ上の任意の2点間の寸法値データを表示部12に表示させる。
(もっと読む)
空撮画像の解析作業支援装置とそのための方法とプログラム。
【課題】 同一の地域を異なる時点に撮影した空撮画像群において相違している地点をより正確に特定する技術を提供し、空撮画像群を比較観察して撮影地域の変遷を把握する作業を支援する。
【解決手段】 同一の地域を異なる時点に撮影した空撮画像群を比較観察し、撮影地域の変遷を解析する作業を支援する装置であり、この解析支援装置は、第1の空撮画像を記憶している第1記憶手段と、第1の空撮画像と同一の地域を異なる時点に撮影した第2の空撮画像を記憶している第2記憶手段と、第1記憶手段が記憶している第1空撮画像の日影範囲を特定する第1特定手段と、第2記憶手段が記憶している第2空撮画像の日影範囲を特定する第2特定手段と、第1特定手段が特定した日影範囲と、第2特定手段が特定した日影範囲の一方のみに含まれる範囲を特定する第3特定手段と、第3特定手段が特定した範囲を表示する表示手段を備えている。
(もっと読む)
異常事象通知システムおよび異常事象通知方法
【課題】 監視カメラの撮影範囲外で異常事象が発生した場合、監視カメラの撮影範囲内で規模の小さな異常事象が発生した場合や照明設備がない場所で夜間に異常事象が発生した場合であっても異常事象の発生を検出させる。
【解決手段】 異常事象通知システム20の二次元画像生成部22は、映像受信部21により受信された映像に基づいて二次元画像を生成する。車両検出部23は、複数の二次元画像から車両に対応する車両画像を検出する。走行状態判定部24は、検出された車両画像に対応する車両が、異常事象発生時に特有の走行状態にあるか否かを判定する。異常事象発生時に特有の走行状態にあると判定された場合に、異常事象通知部25は、異常事象が発生した旨をユーザ端末30にメールで通知する。
(もっと読む)
3次元形状測定装置および方法
【課題】 測定点密度を増加させながらコード探索エラーを減少させる。
【解決手段】 2つのストライプパターンがフレームメモリ110に記憶される。パターン切替部190によりストライプパターンが切り替えられ、2つのストライプパターンを連続して投射し、それぞれのストライプパターンの投影像を撮像して2つの撮像画像を得る。それぞれの撮像画像にエッジ抽出処理とコード付与処理を行い、2組のコード化エッジ画像を獲得する。得られた2組のコード化エッジ画像を重畳して、エッジ密度が高く、コード分布の良好なひとつの統合コード化エッジ画像を獲得する。求められた統合コード化エッジ画像に対して距離計測の計算を実施することで、複数のコード化エッジ画像に対して各々に距離算出を行う場合に比べて、距離算出時のアルゴリズムに起因するエラーの発生をより少なくすることが出来る。
(もっと読む)
端成分データベース構築方法、端成分データベース構築装置及び端成分データベース構築プログラム
【課題】 複数の物質より成る物体の端成分を格納する端成分データベースを構築する。
【解決手段】 端成分抽出部101は、ハイパースペクトル画像151から入力端成分群153を生成する。照合部103は、入力端成分群153のうちスペクトルライブラリ105にも端成分データベース107にも登録されていない端成分群を新規端成分群155として出力する。入力端成分分布画像生成部111は、入力端成分毎に入力端成分分布画像を生成する。新規端成分分布画像選択部113は、入力端成分分布画像のうちの新規端成分に対応するものを新規端成分分布画像として選択する。ユーザは、新規端成分分布画像、ハイパースペクトル画像及び高分解能画像を基に、各新規端成分がどのような物体に対応するかを認識し、各新規端成分毎に、それを端成分データベース107に登録することについての可否を判断し、それを指示する。
(もっと読む)
ステレオ画像の関連付け方法及び3次元データ作成装置
【課題】
複数画像間のパスポイントの対応付けが簡単に行える様にし、ステレオマッチングの効率向上、更にステレオマッチングの自動化を可能とする。
【解決手段】
第1地点から第2地点迄移動しつつ対象物1を撮像可能な撮像装置5と、該撮像装置の位置座標を検出するGPS装置9と、前記撮像装置の撮影方向を検出する方位センサ11と、前記撮像装置の捉えた画像を処理する制御演算部7とを備え、該制御演算部は前記第1地点の画像に複数のパスポイントを設定し、経時的に前後する2つの画像を比較し、前画像のパスポイントを後画像中に検索特定し、パスポイントの検索特定を前記第1地点の画像から第2地点の画像迄順次行い、前記第1地点の画像と前記第2地点の画像とをパスポイントを介して関連付け、前記GPS装置が検出した撮像装置の座標位置データ、前記方位センサが検出した撮像装置の撮像方向データとに基づき前記対象物の3次元データを演算する。
(もっと読む)
画像解析装置,プログラム
【課題】 操作者の手を煩わせることなく、簡単なアルゴリズムにて左右の手を確実に識別する画像解析装置及びプログラムを提供する。
【解決手段】 現画像と背景画像とを比較して変化した部分を差分領域Dとして抽出し、その差分領域Dの重心G、及び差分領域Dを楕円近似することで差分領域D(即ち手を含む前腕)の向き(偏角φ),長軸半径Ra,短軸半径Rbを求める(S110〜S180)。差分領域Dが十分に扁平(Ra/Rb>Hr)である場合に、重心Gと偏角φとに基づいて、仮想肘位置Pを求め、その仮想肘位置Pから差分領域Dが左手或いは右手のいずれを撮像したものであるかを判定し、その判定結果から指先の位置を推定する(S200〜S220)。つまり、画像の細部(個々の指等)を解析することなく、左右判定を行っているため、処理量を大幅に削減でき、また、手の状態の影響を受けることなく左右の手を確実に識別できる。
(もっと読む)
指紋入力装置、指紋入力方法及びプログラム
【課題】ライン指紋センサー面に常時存在する汚れやくもりによって、指が入力されたと誤判断することを防止する指紋入力装置、指紋入力方法及びプログラムを提供する。
【解決手段】ライン指紋センサー11から現在取得した画像の画素出力と、直前に取得した画像の画素出力との差分値の分散値を確認することによって、ライン指紋センサー11に指が入力されているかどうかを判断する。現在取得した画像の画素出力と、直前に取得した画像の画素出力との差分値の分散値に大きな値が認められた場合は、ライン指紋センサー11に指が入力されていると判断し、指紋画像の取得処理を開始する。
(もっと読む)
画像パターン補正方法、及びそれを適用した模擬画像生成方法、並びにパターン外観検査方法
【課題】補正処理パラメータを最適化できて設計画像中のパターンにおけるコーナー部を簡易に精度良く補正し得る画像パターン補正方法を提供すること。
【解決手段】本発明の画像パターン補正方法を実施する装置には、設計データ入力手段からの設計画像に対して設計画像補正処理フィルタ係数計算手段で算出された加工過程特性フィルタと加工過程応答関数とを用いてパターンの補正処理を行うための設計画像補正実行手段5が備えられ、その細部構成は連続量の補正処理フィルタ係数で制御されてフィルタ処理を設計画像に施す加工過程特性フィルタ処理実行手段11と、連続量の補正処理応答関数パラメータ(何れの補正処理パラメータも公知の統計的学習則により算出される)で制御されてその出力結果を加工過程応答関数に入力して出力値を計算することで補正処理後の設計画像として出力する加工過程応答関数計算手段12とから成る。
(もっと読む)
安全保証記録文書
【課題】文書を処理するための改竄防止方法を提供する。
【解決手段】符号化工程に関して、記録されるべきN値レベル画像に関して、画像の画素を、N個の可能な値を有する主成分に分解する工程(ステップ2303)と、主成分、及び画像内の画素の位置に依存するパターン要素を選択する工程(ステップ2303)と、選択パターン要素を転送媒体上に記録する工程(ステップ2308)とから成る。対応する復号工程に関して、方法は、画素に対する検索パターン要素を、記録文書から抽出する工程と、検索パターン要素から抽出された主成分、及び記録文書上の画素の位置に依存するパターン要素を判定する工程と、検索パターン要素及び判定パターン要素を比較する工程とから成る。
(もっと読む)
物体画像抽出装置および物体画像抽出方法
【課題】抽出結果画像に影が残ったり画素が欠けたり、画像中の物体の位置やサイズが影によって変化しない物体画像抽出装置および物体画像抽出方法を提供する。
【解決手段】対象画像DB3から人物の撮影された対象画像を入力する。人物抽出処理部10は、入力した対象画像をグレースケールに変換し、ガボール関数を用いたフィルタ処理を行ない、画像のエッジ情報を維持し影の情報が消えた画像を得る。人物の写っていない背景画像を、背景画像DB4から入力し、グレースケール画像に変換し、ガボール関数を用いたフィルタ処理を行い、背景のエッジ情報を維持し影の情報が消えた画像を得る。ガボール関数処理を行った対象画像と背景画像に対して、背景差分処理を行い、次に結果残された画素に対して凸包を形成する処理を行う。制御部6は、表示形式が全体表示の場合には、対象画像に凸包の多角形を重ね書きしてディスプレイ2に表示する。
(もっと読む)
視覚情報処理装置および適用システム
【課題】
アズビルト3D−CADデータをリアルタイムで自動生成して利用することができる視覚情報処理装置及びその応用システムを提供する。
【解決手段】
移動可能な撮像装置の画像情報を入力とし、入力画像を処理して移動空間に存在する物体のCADデータを自動的に生成する機能と自動的に更新する機能を持たせる。また、CADデータの探索指令信号を入力とし、その指令信号に基づきCADデータを探索する機能と、探索したCADデータの情報を出力する機能を持たせる。更に、その視覚情報処理装置をロボット制御装置などと組み合わせて自律制御型の各種自動機械を構成する。
(もっと読む)
ビジュアル・オドメトリのための方法および装置
(例えば周囲の環境の中をナビゲートする)ビジュアル・オドメトリのための方法および装置が開示される。一実施形態では、周囲の環境の少なくとも一部を表すシーン・イメージのシーケンスが(例えばビデオ・カメラまたはステレオ・ヘッドから)受領される。シーン・イメージのシーケンスが(例えばビデオ処理技法に従って)処理され、周囲の環境に対するポーズの推定が導出される。この推定は、グローバル・ポジショニング・システム、あるいは慣性センサまたは機械センサなどの他のセンサからのデータでさらに補足することができる。 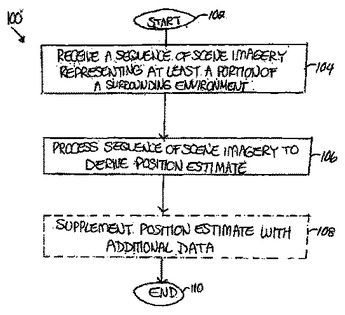 (もっと読む)
(もっと読む)
2,641 - 2,660 / 2,719
[ Back to top ]