
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
2,661 - 2,680 / 2,719
レーダ画像処理装置
【課題】観測対象の範囲に対するその範囲中で時間的変化を生じる範囲の面積比が小さい場合であっても、観測対象の時間的変化の検出精度が高いレーダ画像処理装置を得ることを目的とする
【解決手段】異なる時刻にレーダ装置により取得された観測対象の2つのレーダ画像の観測対象の所定範囲に対応するそれぞれの部分画像間の相関値を算出し、所定範囲の中で異なる時刻の間に時間的変化を生ずる範囲の面積である変化面積を予測して、所定範囲の面積及び予測された変化面積に応じて相関値を補正し、この補正された相関値をもとに所定範囲における異なる時刻の間に生じた観測対象の時間的変化を検出するようにしたものである。
(もっと読む)
ブロック型画像処理のための方法及び電子装置
電子装置が、境界線検出器と、分析装置と、インクルーダとを機能的に有する電子回路を有する。該境界線検出器は、画像(41)における関連領域(45)と関連しない領域(43)との間の境界線(47)を決定するように動作する。前記分析装置は、境界線(47)により横切られるピクセルのブロック(55)を分析するように動作する。前記インクルーダは、前記分析に依存して、境界線(47)により横切られるピクセルのブロック(55)を関連領域(45)に含めるように動作する。本発明は、さらに、ブロック型の画像処理のための画像の関連領域を決定する方法に関する。該方法は、画像の関連する及び関連しない領域の間の境界線を決定するステップと、該境界線により横切られるピクセルのブロックを分析するステップと、該分析に依存して境界線により横切られるピクセルのブロックを関連領域に含めるステップとを有する。本発明は、プログラム可能な装置が本発明の方法を実行するように動作させる制御ソフトウェア、及び本発明の装置に使用する電子回路にも関する。  (もっと読む)
(もっと読む)
物体画像抽出装置および物体画像抽出方法

【課題】抽出結果画像に影が残ったり画素が欠けたり、画像中の物体の位置やサイズが影によって変化しない物体画像抽出装置および物体画像抽出方法を提供する。
【解決手段】対象画像DB3から人物の撮影された対象画像を入力する。人物抽出処理部10は、入力した対象画像をグレースケールに変換し、ガボール関数を用いたフィルタ処理を行ない、画像のエッジ情報を維持し影の情報が消えた画像を得る。人物の写っていない背景画像を、背景画像DB4から入力し、グレースケール画像に変換し、ガボール関数を用いたフィルタ処理を行い、背景のエッジ情報を維持し影の情報が消えた画像を得る。ガボール関数処理を行った対象画像と背景画像に対して、背景差分処理を行い、次に結果残された画素に対して凸包を形成する処理を行う。制御部6は、表示形式が全体表示の場合には、対象画像に凸包の多角形を重ね書きしてディスプレイ2に表示する。
(もっと読む)
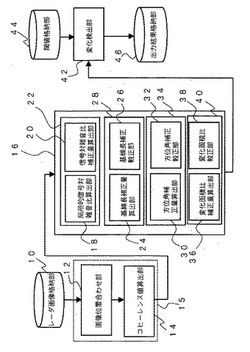
視覚情報処理装置および適用システム
【課題】
アズビルト3D−CADデータをリアルタイムで自動生成して利用することができる視覚情報処理装置及びその応用システムを提供する。
【解決手段】
移動可能な撮像装置の画像情報を入力とし、入力画像を処理して移動空間に存在する物体のCADデータを自動的に生成する機能と自動的に更新する機能を持たせる。また、CADデータの探索指令信号を入力とし、その指令信号に基づきCADデータを探索する機能と、探索したCADデータの情報を出力する機能を持たせる。更に、その視覚情報処理装置をロボット制御装置などと組み合わせて自律制御型の各種自動機械を構成する。
(もっと読む)
ビジュアル・オドメトリのための方法および装置
(例えば周囲の環境の中をナビゲートする)ビジュアル・オドメトリのための方法および装置が開示される。一実施形態では、周囲の環境の少なくとも一部を表すシーン・イメージのシーケンスが(例えばビデオ・カメラまたはステレオ・ヘッドから)受領される。シーン・イメージのシーケンスが(例えばビデオ処理技法に従って)処理され、周囲の環境に対するポーズの推定が導出される。この推定は、グローバル・ポジショニング・システム、あるいは慣性センサまたは機械センサなどの他のセンサからのデータでさらに補足することができる。 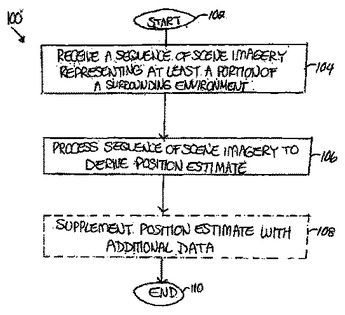 (もっと読む)
(もっと読む)
監視装置及びプログラム
【課題】 人が発報装置を携帯・操作することなく防犯サービスを享受でき、監視者が広い監視区域を少ない労力で監視でき、なおかつ警察の初動捜査にも貢献しえる装置を提供する。
【解決手段】 検知部11において監視区域内から発せられた物理信号及びその発信位置を検知し、画像撮影部12において監視区域内の画像を時系列的に撮影し、撮影された画像情報を、その撮影時刻に対応付けて画像記憶部13に記憶する。そして、検知結果解析部14において、検知部11が検知した物理信号が所定の設定条件を満たした場合に、その物理信号の発信位置(対象地点)及び検知時刻(検知位置)を抽出し、画像抽出部15において、この検知時刻を含む時系列的な期間である抽出期間内に画像撮影部12が撮影した画像情報を、画像記憶部13から抽出する。その後、被疑物体画像抽出部16において、画像抽出部15が抽出した画像情報を解析し、対象地点に接近する物体の画像を抽出する。
(もっと読む)
瞳孔検出方法及びシステム
異なる波長の光を放射する単一の広帯域な光源又は複数の光源(104、106)により、検出対象の物体(300)を照射する。ハイブリッドフィルタによってカバーされた光検出センサ(700)を含むイメージャ(102)により、光をキャプチャする。 (もっと読む)
デジタルカメラ画像における赤目の特定
デジタルカメラによって生成されるカラーデジタル画像における赤目を検出する方法は、前記デジタルカメラを使用して、フラッシュによる第1カラーデジタル画像とフラッシュなしの第2カラーデジタル画像による同一のシーンの2つのオリジナルカラーデジタル画像をキャプチャし、前記デジタル画像のそれぞれに対して、赤色、緑色及び青色の画素を有する同一のプライマリカラースペースによる複数の画素を生成するステップと、前記第1及び第2デジタル画像のプライマリカラースペースを特定のカラーのペアと相対強度を特定する同一のクロミナンスチャネルに変換するステップとを有する。本方法はさらに、フラッシュなしにキャプチャされた前記画像のクロミナンスチャネルとフラッシュによりキャプチャされた前記画像のクロミナンスチャネルとの間の差分を計算するステップと、前記差分に応答して、前記第1カラーデジタル画像内の赤目の位置を特定するステップとを有する。
 (もっと読む)
(もっと読む)
情報強調された画像誘導介入
介入的及びリアルタイム超音波情報と、例えばX線回転血管造影法により提供される血管又は腫瘍脈管化の非リアルタイムな生体構造情報とのリンク付けは、高い計算性能を必要とする。本発明の側面によれば、超音波基準画像が異なる画像化システムにより得られる高品質画像に関して較正される。そして、操作的な介入の間、その介入の間得られるデータセットの位置合わせ又は較正が、(従来技術のデバイスにおける)高品質画像に対してではなく、基準画像に対して行われる。有利なことに、これは、高品質画像とリアルタイム画像との高速な融合を可能にすることができ、従って、患者に関して行われる操作的な介入の改良されたトラッキングを可能にすることができる。  (もっと読む)
(もっと読む)
撮像制御装置及びプログラム
【課題】 エネルギーの浪費を抑制し、常に最適な撮像が可能な撮像制御装置及びプログラムを提供すること。
【解決手段】 ステップ110では、メイン投光器3により近赤外光を照射し、ステップ120にて、メインカメラ1により撮像を行う。ステップ130では、サブ投光器7により近赤外光を照射し、ステップ140では、サブカメラ5により撮像を行う。ステップ160では、顔位置を検出する。即ち、メインカメラ1及びサブカメラ5の画像を用いて、三角測量の原理を利用して、顔との距離を求める。従って、2回目からは、各カメラ1、5と顔との距離に応じて、メイン投光器3から照射する近赤外光の好ましい投光量(従ってメイン投光器3のパワー)を算出する。
(もっと読む)
薬物動力学的画像レジストレーション
非常に多くの場合、画像レジストレーションは、手動で実行されなければならない退屈な作業であった。本発明の1つの実施例によれば、画像時系列のレジストレーションは、薬物動態学的モデルに基づいて関心領域の代替変換列が互いに比較される、薬物動態学的モデルに基づいて実行され、最高の変換ベクトル列は、画像レジストレーションのために用いられる。有利なことに、これは、たとえ解剖学的コントラストが全く又はほとんどない場合でも、臓器運動の効果的な補償を可能にすることができる。  (もっと読む)
(もっと読む)
データ処理装置、データ処理方法、及びデータ処理プログラム
【課題】 構造物のひび割れや浮き、空洞等の変状部の有無及び位置を容易且つ安価に特定することを可能とし、また、当該変状部の経年変化をも容易且つ安価に把握することを可能とする。
【解決手段】 データ処理装置は、寸法情報を有する線図情報からなるCAD図面データを入力するCAD図面データ入力部21と、画像データを入力する画像データ入力部22と、この画像データ入力部22によって入力された画像データ上における座標値を算出する座標算出部23と、画像データ入力部22によって入力された画像データ上の情報をCAD図面データ入力部21によって入力されたCAD図面データ上に写像する写像処理部24と、この写像処理部24によって作成された写像後のCAD図面データを含む各種データを出力するデータ出力部25とを備える。
(もっと読む)
3Dデータ表示方法、装置、およびプログラム
【課題】 自分の体の動きを入力情報としてバーチャルな試着を行ない自分の体の動きに応じた試着結果を見ることができる3Dデータ表示方法を提供する。
【解決手段】 マーカ位置算出部4は可視光カットフィルタが入れられている。カメラ1から画像データを取り込み、位置マーカを検出、位置マーカ情報(マーカID、カメラ画面上での座標、大きさ、回転角など)を取得し、位置マーカ情報およびカメラ1の位置、角度より各位置マーカの絶対座標を求める。モーション処理部5は、各位置マーカの位置、傾きデータから各円柱の中心座標、中心軸の傾きのデータ(モーションデータ)を求める処理を一定時間ごとに繰り返し、モーションデータを蓄積する。表示部品加工部7は人体モデルの各部品に対する服飾データを服飾DB6から取り込み、部品の大きさに合わせて服飾データをスケーリングし、出力する。表示部8は服飾データを対象物に表示する。
(もっと読む)
パンタグラフのすり板検査装置。
【課題】
従来のカメラによるパンタグラフすり板の検査では、すり板側面の照明を当ててパンタグラフを撮像していたが、この方法では、すり板上面と側面を高精度に分離することが難しかった。
【解決手段】
カメラでパンタグラフを撮像する際に、パンタグラフすり板上面を照射するストロボ照明と、パンタすり板側面を照射するストロボ照明を設け、すり板上面を照射するストロボ光に比べてすり板側面を照射するストロボ光の光量を少なくして撮像する構成とした。
(もっと読む)
画像のマルチモーダル登録のための装置及び方法
本発明は、例えば、手術前に得られる三次元X線画像(A)及び手術中に得られる超音波画像(B)である、異なるイメージング方法の画像が登録される装置及び方法に関する。次いで、第1変換画像(A′、B′)がデータ処理装置(10)で生成され、それらの画像は、各々のイメージング方法の特性に関して互いにアライメントされる。特に、三次元CT画像(A)から、超音波システムの表現の特徴的手段に従う二次元画像(A′)が生成される一方、骨及び/又はガスが満たされたボリュームの背後のシェーディングの領域が、調和される。変換画像(A′、B′)の特徴に基づく登録により、エラーは回避され、それにより、それぞれのイメージング方法のアーティファクト及び独特性にトレースバックすることができる。  (もっと読む)
(もっと読む)
通過車両をダイナミックなバックグランドから頑強な情報フュージョンを使用して検出するための装置および方法
通過車両を検出するための装置および方法が開示される。複数の画像フレームを含みビデオシーケンスが受信される。画像強度が測定され、画像の動きが各画像フレームで評価される。バックグランドダイナミクスを表す仮説が定式化される。測定された画像強度と動き評価は、バックグランドダイナミクスが所定の画像フレームで妨害されているか否かの決定に使用される。バックグランドダイナミクスが妨害されている場合、バックグランドダイナミクスの妨害が通過車両によって引き起こされているか否かの決定に動き一貫性が使用される。  (もっと読む)
(もっと読む)
構造化オブジェクトの画像を登録するための装置及び方法
本発明は、患者の胸部(2)のような対象物の第2の記憶された画像(A2)と共に第1画像(A1)を登録するための装置及び方法に関する。画像(A1、A2)は、例えば、X線CTシステム(1)により生成され、肺腫瘍の傾向制御において用いられる。画像(A1、A2)は、複数のオブジェクト構成要素(a、b、c)に自動的にセグメント化される。これに後続して、進行中のタスクに関連するオブジェクト構成要素(b)の画像領域(B1、B2)のみが登録される。肺腫瘍の傾向制御において、例えば、肺の領域(b)の登録は満足できるものである。 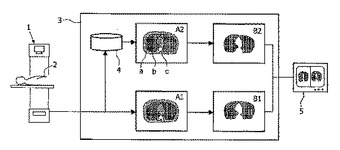 (もっと読む)
(もっと読む)
画像処理装置と画像処理方法およびプログラム
画像内の動きオブジェクトを追従しながら、この動きオブジェクトの動きボケを軽減する。動きベクトル検出部30は、時間積分効果を有する画像センサにより取得された複数画素か
らなる画像の画像データDVaを用いて、この画像内の動きオブジェクトについて動きベクトルを検出する。動きボケ軽減オブジェクト画像生成部40は、検出された動きベクトルを用いて、画像内の動きオブジェクトに生じた動きボケを軽減させて動きボケ軽減オブジェクト画像の画像データDBfを生成する。出力部50は、背景成分画像データDBbに基づく画像上の検出された動きベクトルに対応する時空間位置に、動きボケ軽減オブジェクト画像の画像データDBfを合成して動きボケ軽減画像の画像データDVoutを生成する。
(もっと読む)
照明アーチファクトの画像減算
画像システムのインライン照明デバイスからもたらされるアーチファクトを被写体画像から除去する方法。この方法は、第1のアーチファクト照度レベルを使用して、アーチファクトの第1の画像を獲得し、照明デバイスが被写体照度レベルを使用している画像システムを使用して、被写体を画像化することを含む。アーチファクト画像は、被写体とは独立であり、照度レベルに関連するピクセル値を有する。このため、アーチファクトは、被写体画像のそれぞれ値からアーチファクト画像のそれぞれのピクセル値を、ピクセルアドレスごとに減算することによって除去されることが可能である。様々な照度レベルを使用して、複数のアーチファクト画像を生成することができる。減算のためのアーチファクト画像は、撮影された画像の1つであることも、アーチファクト画像が、被写体照度レベルまで変倍された、変倍された画像であることも可能である。  (もっと読む)
(もっと読む)
手術中の2次元画像および手術前の3次元画像をアフィン重ね合わせするための方法およびシステム
手術中のターゲットフィーチャの2次元(2D)医学画像を手術前のターゲットフィーチャの3次元(3D)医学画像と重ね合わせるためのシステムおよび方法が開示される。ターゲットフィーチャの3D画像は第1スケルトングラフに変換される。ターゲットフィーチャの2D画像は第2スケルトングラフに変換される。第1スケルトングラフと第2スケルトングラフのグラフマッチングがグラフの荒いアライメントを得るために実行され、第1スケルトングラフト第2スケルトングラフが重ね合わされる。 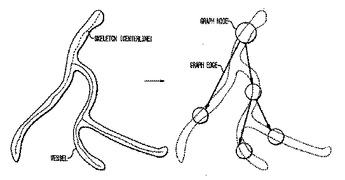 (もっと読む)
(もっと読む)
2,661 - 2,680 / 2,719
[ Back to top ]