
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
2,681 - 2,700 / 2,719
画像における自動造影剤制御
カテーテル又はガイドワイヤ介入の間、例えば、事前介入的な血管造影に基づく冠状動脈血管ツリーのロードマップが表示される。しかしながら、このロードマップは、当然に静的であり、従って、スクリーンにおいてそのロードマップの隣に表示されることができる、生命画像における瞬間的な心臓及び呼吸の状態と一致しない。本発明の例示的な実施形態によれば、注目対象のx線画像の系列において、注目対象が造影剤によって十分には満たされていない画像が決定される。有利には、こうした画像は、改良されたロードマップを提供するのに使用されることができる。
 (もっと読む)
(もっと読む)
異なるコントラストレベルを有する画像を比較するためのシステムおよび方法
異なるレベルのコントラストを有する画像を比較する方法論およびシステムが提供される。異なるコントラストレベルを有する画像間でコントラストが正規化され、輝度が設定される。コントラストを正規化する際、第1のコントラストレベルを有する第1のデジタル画像について、グレーレベルの導関数が求められ、第1のコントラストレベルよりも大きい第2のコントラストレベルを有する第2のデジタル画像について、グレーレベルの導関数が求められる。第1のデジタル画像についてのグレーレベルの導関数と第2のデジタル画像についてのグレーレベルの導関数との比率が求められ、第1のデジタル画像についてのグレーレベルの導関数は、第2のデジタル画像についてのグレーレベルの導関数と等化される。少なくとも一方の画像の輝度は、バックグラウンドおよびテキストを除いて平均画素値を計算することなどによって自動で、または手動で設定されてもよい。 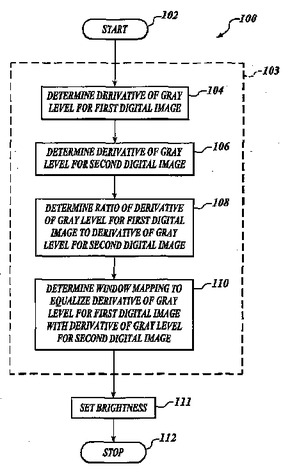 (もっと読む)
(もっと読む)
遮蔽された部分の表面を対称性の算出により見込み復元するための技術

【解決手段】所与の物体の遮蔽面の見込み3Dマップを計算するシステムに関する。このシステムは、物体の視認可能面の初期3Dマップを取得し、初期3Dマップから1以上の対称性を特定する。システムは、初期3Dマップの点を特定された対称性にしたがって遮蔽空間に投影することにより、遮蔽面の見込み3Dマップを計算する。このシステムは初期3Dマップを取得するための画像装置を含む。現実の遮蔽面は隠されているが故に完全にはわからない。しかし、計算された3Dマップは実際の遮蔽空間に多くの点で近似する。なぜなら、ほとんどの物体は1以上の対称性をもっており、計算された3Dマップは物体の初期3Dマップにおいて特定されたそのような対称性に基づくからである。 (もっと読む)
弾力的な画像位置合わせ
画像位置合わせは、従来、非常にしばしば手動で実行する必要のある面倒な仕事であった。本発明のある例示的な実施形態によれば、目印と類似性値との組み合わせに基づく逐次精製プロセスによる非剛体的な画像位置合わせが提案される。有利なことに、非常に高速かつ堅牢な方法が提供されうる。 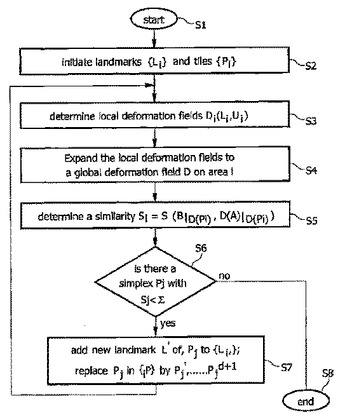 (もっと読む)
(もっと読む)
ボリュームデータセットの画像セグメント化
冠動脈セグメントは、心臓CT画像処理において重要なタスクである。これはしばしば、オペレータにより手作業により実行される面倒な作業である。本発明によると、完全かつ連続的な冠動脈ツリーを提供するため、セグメント化処理中に複数の心臓フェーズからのデータを合成する方法が提供される。効果的には、これは、冠動脈CTAなどの血管の可視化及びセグメント化を向上させるかもしれない。  (もっと読む)
(もっと読む)
空間領域における頑強で可逆なデータ隠蔽およびデータ復元のためのシステムおよび方法
画像ブロック内で少なくとも2つの画素サブセットを識別する工程と、少なくとも2つの画素サブセットから複数の画素グループを形成する工程であって、その画素グループの各々は、少なくとも2つのサブセットのうちの第1のサブセットから少なくとも1つの画素を含み、少なくとも2つのサブセットのうちの第2のサブセットから少なくとも1つの画素を含むことと、複数の差値を生成する工程であって、画素グループの各々は前記差値のうちの1つを提供し、前記差値の各々は、画素グループのうちの1つに存在する画素の画素値間の差に基づくものであることと、少なくとも2つのサブセットのうちの全てではないサブセットにおける画素の画素値を修正し、それによって前記ブロックに1つのビット値を埋め込む工程とを備える方法。  (もっと読む)
(もっと読む)
画像補正パラメータを用いた画像処理

【課題】 個々の画像生成装置に適した画像補正パラメータセットを用いた画像処理を容易に行う。
【解決手段】 所定のテストチャートの基準画像データとテストチャート撮像により生成された対象画像データを取得する。複数の画像補正パラメータから注目補正パラメータを選択し、基準画像データと色空間処理後の対象画像データとを比較して注目補正パラメータ値を決定し、決定値による画像補正によって色空間処理後の対象画像データを更新する処理を、複数の画像補正パラメータについて順次実行する。決定された複数の画像補正パラメータ値を特定の画像生成装置に適した画像補正パラメータセットとして設定する。設定された画像補正パラメータセットと画像生成装置により生成された画像データを画像処理装置に格納する。画像補正パラメータセットを用いて画像データの画像補正を行う。
(もっと読む)
ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法
本願では、ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法を開示する。訓練ステージにおいて、ステレオカメラの対から同時に取り込まれたイメージの対が受信され、イメージの各対内の構成要素が識別される。各構成要素に対してフィーチャが関連づけられ、各フィーチャに対して値が関連づけられる。これらのフィーチャの中から、最も良好な判別能力を有するフィーチャのサブセットが選択され、イメージの対内の所与の構成要素に対して強いクラシファイアを形成する。検出ステージでは、入力されたイメージ対においてこの強いクラシファイアを使用して、構成要素が検出される。識別された構成要素は、乗員および該乗員の頭部ポーズを検出するために使用される。ステレオ検出がステレオマッチングと体系的に組み合わされることにより、乗員の検出および位置決定が改善される。  (もっと読む)
(もっと読む)
画像生成装置用の画像補正用パラメータの生成
【課題】 個々の画像生成装置に適した画像補正パラメータセットを容易に生成する。
【解決手段】 所定のテストチャートを表す画像データとして、基準色空間で表現された基準画像データと画像生成装置によってテストチャートを撮像することにより生成された対象画像データとを格納する。複数の画像補正パラメータの中から未選択の画像補正パラメータ1つを注目補正パラメータとして選択し、基準画像データと色空間処理後の対象画像データとを比較して、色空間処理後の対象画像データを基準画像データに適合させるように注目補正パラメータの値を決定し、決定された値を用いた画像補正を施すことによって色空間処理後の対象画像データを更新する処理を、複数の画像補正パラメータの中の各画像補正パラメータについて順次実行する。決定された複数の画像補正パラメータ値を特定の画像生成装置に適した画像補正パラメータセットとして設定する。
(もっと読む)
画像処理方法及びその手段
NMR像における識別を可能にする方法及び手段であって、(コントラスト後の動的画像等の)対象の連続画像の画素値における誘起された変化を記録する画像の時系列の一つであり、画像への寄与は特定の組織(例えば、脂肪)の画像対象内の存在から生ずるものを提供する。この識別は、時系列を形成する複数の独立した画像から得られた動的データ(例えば、コントラスト剤の取得に起因した画素値の変化)を用いて実行される。  (もっと読む)
(もっと読む)
補正方法
【課題】ダスト、スクラッチ及び他の光学的なブレミッシュを自動的に検出し、補正できる好適な画像補正方法を提供する。
【解決手段】光学システムに含まれるデジタル取得装置によって取得された画像内のダスト人工物領域を自動補正する補正方法であって、前記デジタル取得装置で取得する一つ以上の原画像デジタル取得ステップと、複数の画素が前記一つ以上のデジタル取得画像の中のダスト人工物領域に一致する確率を決定するステップと、一つ以上の画像が取得されたとき前記光学システムの関連する一つ以上の抽出されたパラメータとダスト人工物領域を結びつけるステップと、前記ダスト人工物確率決定と前記結びつけに基づき描かれたダスト領域を含んでいる統計的なダストマップを形成するステップと、前記結び付けられた統計的なダストマップに基づき、前記一つ以上の各原画像の中のダスト人工物領域に一致する画素を補正するステップとを有することを特徴とする補正方法。
(もっと読む)
3D自動測量装置
360度全周囲カメラで得られる動画映像を解析して、画像内の任意の対象物について高精度な三次元計測を行う。所望の計測点と座標が既知の基準点を含む動画像を撮影する周囲画像撮影部101と、撮影画像を記録する画像記録部102と、画像内の映像的な特徴点を抽出する特徴点抽出部103と、画像内の計測点を自動抽出する計測点特定部104と、画像内の基準点を自動抽出する基準点特定部105と、計測点,基準点,特徴点を各フレーム画像内で対
応付ける対応点追跡部106と、対応付けられた計測点,基準点,特徴点の三次元相対座標を演算するベクトル演算部107と、上記演算を繰り返して三次元相対座標を統計処理する誤差最小化処理部108と、基準点の既知座標により三次元相対座標を絶対座標系に変換する絶対座標取得部109と、最終座標を記録する計測データ記録部110と、記録された計測データを表示する表示部111とを備える。
(もっと読む)
移動体動き算出方法および装置、並びにナビゲーションシステム
移動体動き算出装置(100)において、対応点算出部(101)はカメラ120によって撮影された画像間の対応点を算出する。第1の動き算出部(102)は画像内に所定の平面を仮定して、対応点を用いて移動体の第1の動き(Ma)を算出する。第2の動き算出部(103)は第1の動き(Ma)と対応点を用いて、第2の動き(Mb)を算出する。  (もっと読む)
(もっと読む)
監視装置
監視装置は、カメラ(101)で撮影された全体画像をフレーム毎に受けて全体画像に対してフレーム間差分処理、又は事前に用意された背景画像との背景差分処理を行う移動体画像生成部(102)と、差分処理された画像(移動体画像)を1次元情報に変換し、周波数分析を行って、移動物体または群衆の密集の度合いを示す密集度を算出する密集度算出部(103)と、所定日時の密集度に基づいて移動物体又は群衆の基準密集度(モデル値)を算出するモデル生成部(104)と、現時刻における密集度と基準密集度との比較を行って、現時刻における密集度が基準密集度と異なるか否かを判断して判断結果を生成して報知部(107)に与える状況判断部(106)とを備える。  (もっと読む)
(もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 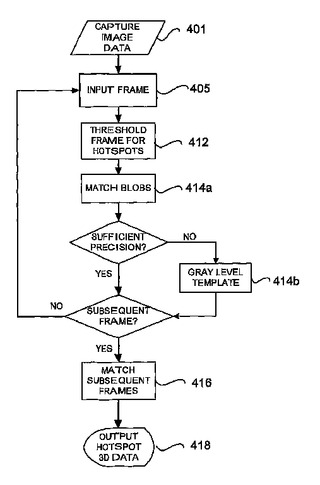 (もっと読む)
(もっと読む)
長方形状動き検索
長方形状動き検索のための方法が開示される。当該方法のある実施形態は、長方形の検索領域をなす複数の動き検索点に対して動き測定を実行し、前記動き測定の結果に基づいて動き検索点のうちで最小動き検索点を見出し、該最小動き検索点が当該長方形検索領域の内部領域にあれば当該ピクセルブロックの第一のビデオフレームから第二のビデオフレームへの相対的な移動に対応する動きベクトルを見出すことを含む。
 (もっと読む)
(もっと読む)
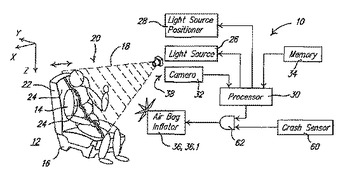
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
複数のイメージセンサ間における視野関係を決定するためのコンピュータ化された方法及び装置
第1の光景を表す複数の第1のビデオフレームについての第1のイメージデータを受容する(図5の502)ことを含むコンピュータ化されたイメージ解析方法。第1のビデオフレームの各々(図1の102(1))が複数のイメージ領域から構成され、少なくとも1つの第1のビデオフレームの1つのイメージ領域内に第1のオブジェクトが存在する。第2の光景を表す複数の第2のビデオフレームについての第2のイメージデータ(図1の102(2))が受容される。第2のビデオフレームの各々が複数のイメージ領域(図5の504)を含み、少なくとも1つの第2のビデオフレームの1つのイメージ領域内に第2のオブジェクトが存在する。本方法はまた、第1のイメージ領域内に存在する第1のオブジェクトの発生と第2のイメージ領域内に存在する第2のオブジェクトの発生との間の確率的な相関関係に基づいて、第1のイメージ領域と第2のイメージ領域との間の関係を決定する(図5の510〜512)。 (もっと読む)
映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置
【課題】 映像に基づいたフォトリアリスティックな3次元の顔モデリング方法及び装置を提供する。
【解決手段】 描写された多角形のメッシュモデルによって表現される3次元のフォトリアリスティックな顔モデル生成方法において、入力映像の正面及び側面の顔映像内の顔特徴を検出する段階と、特定顔の3次元形状を決定するために、検出された顔特徴を利用して初期モデルを変形させて3次元の顔モデルを生成する段階と、入力映像からフォトリアリスティックなテクスチャを生成する段階と、前記テクスチャを前記3次元モデル上にマッピングする段階と、を含むことを特徴とする3次元の顔モデリング方法。これにより、デジタルカメラのように相対的に高価ではない装置を利用してデータを獲得し、可能な限り自動化を具現して、完全でない入力データから望ましく実際の人間らしい顔のモデ
リング方法を提供する。
(もっと読む)
車両システム
両システムを操作する操作装置と、操作装置を介する車両システムの操作を制御する制御部とを備えた自動車における運転のための車両システムにおいて、操作装置への操作アクセスが車両ドライバにより行われるか、車両の他の乗員により行われるかを識別するために構成されている装置が設けられおり、制御部は操作装置を介する車両システムの操作を少なくとも、操作装置への操作アクセスが車両ドライバにより行われるか、車両の他の乗員により行われるかに依存して制御するよう構成されていることを特徴とする、車両システムが提案される。独立請求項の特徴を備えた本発明による車両システムは、車両システムに車両ドライバがアクセスするか、その他の車両の乗員がアクセスするかに依存して操作が制御されるという利点を有する。したがって、車両ドライバを本来の運転任務から過度に注意を逸らさせる可能性のある操作アクセスは効果的に阻止される。しかしながらそれと同時に車両システムはその他の車両乗員に対して少なくとも広範に操作可能のままであるか、完全な範囲で操作可能のままである。 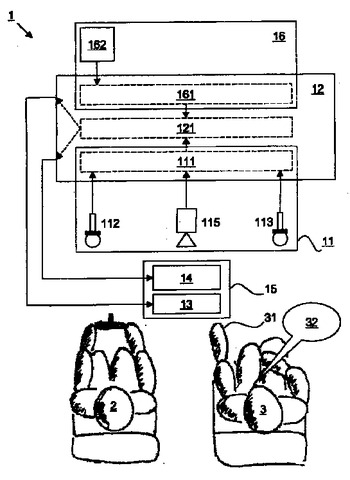 (もっと読む)
(もっと読む)
2,681 - 2,700 / 2,719
[ Back to top ]