
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
701 - 720 / 2,719
撮像装置および方法、画像処理装置および方法、並びにプログラム

【課題】美しいフォトモザイクを生成するために必要となる画像を、簡単に収集することができるようにする。
【解決手段】フォトモザイク画像生成部30は、制作目標画像の各ブロックの画素値などに基づいてクラス分類を行い、画像データベース51に蓄積されている画像を同様の方式によりクラス分類し、各ブロックに相応しい画像を選択する。画像要求処理部70は、制作目標画像の各ブロックのクラス分類結果、および画像データベース51に蓄積されている画像のクラス分類結果に基づいて、撮像装置100に対する画像の取得要求のためのリクエストデータを送信する。撮像装置100は、リクエストデータに基づいて、不足しているクラスの画像であると判定された画像を撮像してフォトモザイク画像生成装置10に送信する。
(もっと読む)
携帯端末による天体の表示システム

【課題】シミュレーションによって生成された天体画像と、実際にカメラによって撮影された画像の差分を取得し、雲に隠れている天体や、天体以外の飛行体等を発見することを容易にする、携帯端末による天体の表示システムを提供する。
【解決手段】ホストシステム12と、ホストシステム12から情報を受信する1又は複数の携帯端末13とから構成される、携帯端末による天体の表示システムであって、携帯端末13は、天体の画像を撮影して、色の明るい点が表示されている位置と点の明るさを抽出した撮影天体情報と、ホストシステム12から受信した地平座標系天体情報をカメラ座標系に変換したカメラ座標系天体情報との座標が一致するように、撮影天体情報の座標を変換してマッチングを行なう手段と、マッチングした結果、両者の天体情報で一致していない箇所を強調して可視化した画像を生成し、表示部に画像を表示する手段等を備えている。
(もっと読む)
車両用撮像装置
【課題】演算負荷が増大することを防止しつつ消失点の検出精度を向上させ、車両の走行中での光軸補正を消失点に基づき精度よく行なう。
【解決手段】車両用撮像装置10は、車載カメラ11から出力された撮像画像においてオプティカルフローを演算するオプティカルフロー演算部21と、オプティカルフローに基づき車載カメラ11の光軸を補正する光軸補正部26と、オプティカルフローのX成分およびY成分を算出するXY成分算出部22と、オプティカルフローのX成分またはY成分の大きさが所定閾値以上である画像領域を抽出する画像領域抽出部23と、オプティカルフローのX成分またはY成分の大きさが所定閾値以上である画像領域に基づきオプティカルフローの消失点を算出する消失点算出部25とを備え、光軸補正部26は、消失点に基づき車載カメラ11の光軸を補正する。
(もっと読む)
半導体装置の欠陥検査方法
【課題】効率的に検査領域を設定することが可能な半導体装置の欠陥検査方法を提供する。
【解決手段】NonパターンDie10及びパターンDie11を比較して第1の仮パターンを取得し、第1の仮パターン第1の微細部分の集合とし、第1の仮パターンのY座標それぞれについて、隣り合った第1の微細部分間のX軸方向の座標差が所望の値より大きくなる第1の微細部分を抽出し、抽出された第1の微細部分から第1のエッジ領域を規定し、NonパターンDie及びパターンDieを90度回転させて比較して第2の仮パターンを抽出し、第2の仮パターンを第2の微細部分の集合とし、第2の仮パターンのY座標それぞれについて、隣り合った第2の微細部分間のX軸方向の座標差が所望の値より大きくなる第2の微細部分を抽出し、抽出された第2の微細部分から第2のエッジ領域を規定し、第1及び第2のエッジ領域に囲まれている領域を検査領域として導出する。
(もっと読む)
歯顎顔面対象をデジタル化するための方法
本発明は、歯顎顔面対象の形状を前記歯顎顔面対象のボリュメトリック画像データから捕捉するための方法に関する。該方法は、a)前記歯顎顔面対象とその背景との区別を示す少なくとも1つの算出されたセグメント化パラメータにより前記ボリュメトリック画像データのセグメント化を実行するステップと、b)前記セグメント化されたボリュメトリック画像データから前記歯顎顔面対象の形状を捕捉するステップとを含む。 (もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】AAMによる顔画像のモデル化の精度を向上し、重なり合った顔画像であっても顔輪郭の特定精度を向上する。
【解決手段】対象画像TIに含まれる顔画像の輪郭を特定するにあたり、顔領域検出部M1が対象画像TIから顔領域FAを検出し、各顔領域FAの検出された座標に基づいて重複範囲を設定する。そして、検出順位設定部M2は、顔領域FAの信頼度や顔領域FAのサイズや顔領域FAにおける器官検出の有無などに基づいて検出順位情報RIを作成する。顔特徴位置特定部M3は、検出順位情報RIに基づいて特徴点CPの位置を特定すべき顔領域FAを選択し、この顔領域FAよりも順位が上位の顔領域FAとの重複範囲については考慮しつつ、順位が下位の顔領域FAとの重複範囲については考慮せずに、特徴点CPの位置を特定することにより顔画像の輪郭を特定する。
(もっと読む)
カメラパラメータのキャリブレーション装置及びプログラム
【課題】直感的なキャリブレーション処理を可能とする、カメラパラメータのキャリブレーション装置を提供する。
【解決手段】キャリブレーション装置は、各撮影画像内の同じ被写体の同じ点である対応点それぞれについて、撮影画像内での位置を示す画像座標系での第1の座標を保存する手段と、各カメラのカメラパラメータから世界座標系と画像座標系とを変換する射影行列をそれぞれ計算する手段と、各カメラそれぞれについて、カメラの射影行列及び該カメラの撮影画像内の第1の座標に基づき実空間内の直線を求める手段と、各カメラの射影行列及び各撮影画像の第1の座標に基づき実空間上の1点の世界座標を求め、求めた世界座標と座標変換手段が求めた各直線との距離に基づき誤差量を算出する手段と、算出した誤差量を表示する手段と、保存している各カメラのカメラパラメータを変更する手段とを備えている。
(もっと読む)
車両周辺監視装置および車両周辺監視方法
【課題】静止立体物と移動体とを区別して検出する。
【解決手段】車両周辺監視装置は、車両に取り付けられた撮像カメラと、撮像カメラからの撮像データを画像処理し特徴点を抽出する画像処理部210と、特徴点についての物体の判定を行う物体判定部220とを有する。画像処理部210は、撮像データの特徴点の動きベクトルを検出する第1の検出手段と、俯瞰画像に変換された特徴情報の動きベクトルを検出する第2の検出手段とを含む。物体判定部220は、第1の検出手段および第2の検出手段によって特徴点の動きベクトルが検出されたとき、当該特徴点を移動体と判定し、第1の検出手段によって特徴点の動きベクトルが検出されずかつ第2の検出手段によって特徴点の動きベクトルが検出されたとき、当該特徴点を静止立体物と判定し、第1の検出手段および第2の検出手段によって特徴点の動きベクトルが検出されないとき、当該特徴点を背景と判定する。
(もっと読む)
車両周辺監視装置
【課題】赤外線画像から自転車運転者を検出する車両周辺監視装置を提供する。
【解決手段】赤外線画像を2値化画像に変換し、基準テンプレート(104a)から領域(Pt1−Pt4)のそれぞれの相関誤差(Ed)を算出する。相関誤差(Ed)の振幅が周期的に変動しているとき、対象物が自転車運転者であると判定する。
(もっと読む)
物標検出装置および物標検出方法
【課題】高い認識精度と、高いリアルタイム性とを兼ね備えた物標検出装置および物標検出方法を提供する。
【解決手段】記憶部4には、対象物の認識に用いるトレーニング用および参照用の特徴量(ポジティプデータ、ネガティブデータ)として、画像中のROIの大きさを考慮して、複数の画像サイズのものが記憶されている。制御部4では、複数の参照用の特徴量のうち、特徴量の距離(サイズ)に対応した特徴量が選択された上で、マッチングが行われる。これにより、ステレオカメラ2から得られたROIの2次元画像の距離(サイズ)が、あらかじめ用意された参照用の特徴量の距離(サイズ)と大きく異なることをなくすることができる。
(もっと読む)
経時的な動的挙動に基づくパラメトリック画像
データ処理方法は、分析期間の臓器を表す一連インプット画像を提供するステップであって、個々のインプット画像は、分析期間内の対応する取得瞬間における臓器の対応する位置の呼掛信号に対する応答を、各々が示すインプット値のセットを含む、ステップと、選択された位置のセットの内の各々と時間に関する分析関数を関連付けるステップであって、分析関数は一連インプット画像内の選択された位置のインプット値の傾向をモデル化する、ステップと、分析関数に対して時間に関する参照関数を提供するステップと、個々の選択された位置の分析関数を、選択された位置の分析関数と参照関数との間の発散の極性の分析期間における傾向を表す極性傾向を判別する参照関数と比較するステップと、個々の選択された位置に対するパラメトリック値を含むパラメトリック画像を生成するステップであって、パラメトリック値は選択された位置の極性傾向を示す、ステップとを含む。 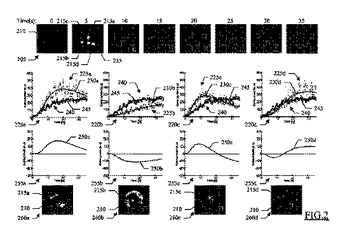 (もっと読む)
(もっと読む)
画像処理装置および画像処理方法
【課題】多重解像度画像を用いた対応点探索処理の処理性能を改善する。
【解決手段】互いに対応する画像内容を含んだ原基準画像と原参照画像とを取得する画像取得手段と、取得した原基準画像と原参照画像とを低解像度化することによって、解像度の異なる複数の画像を階層的に生成する多重解像度画像作成手段と、注目階層に属する注目基準画像に注目点を設定する注目点設定手段と、注目点についての、注目基準画像と注目参照画像との視差を求める視差特定手段と、視差特定手段が視差を求めるにあたって1)注目点を内包するウィンドウが注目基準画像内に収まるときには、ウィンドウ内の画像情報を用いる第1視差特定規則を、2)ウィンドウが注目基準画像からはみ出すときには、注目基準画像の外部領域からの寄与度を第1視差特定規則よりも低めた第2視差特定規則を、選択的にそれぞれ適用させる選択適用手段と、を備える。
(もっと読む)
マスク画像を抽出する方法及びプログラム並びにボクセルデータを構築する方法及びプログラム
【課題】床面付近およびシルエット輪郭上の不要部を逐次的に除去することが可能な不要部除去処理を備えている精度の高いマスク画像を抽出する方法を提供する。
【解決手段】複数の被写体画像と複数の背景画像とから背景差分により、複数の第1のマスク画像を抽出し、複数の第1のマスク画像から視体積交差法により、3次元ボクセルデータを構築する。3次元ボクセルデータに対して、欠損を充填する及び/又はノイズを除去する加工を施し、第2の3次元ボクセルデータを構築する。第2の3次元ボクセルデータを基に、複数の第1のマスク画像の欠損を充填する及び/又はノイズを除去する、被写体画像及び/又は背景画像の色情報をもとにした加工を施し、複数の第2のマスク画像を抽出する。
(もっと読む)
3次元データ生成装置、3次元データ生成方法およびプログラム
【課題】ステレオ画像から比較的簡易に2枚の画像の対応点を求める3次元データ生成装置、3次元データ生成方法およびプログラムを提供する。
【解決手段】画像データ入力部2は、異なる位置から所定の領域を撮影した2つの画像の画像データを取得する。位置指定部3は、2つの画像データのそれぞれの画像で、1つの構造物の領域に含まれる画像上の指定点を取得する。閉領域抽出部4は、2つの画像データのそれぞれの画像で指定点を含み、指定点との色の差が所定の範囲であって連続する画素の集合である閉領域を抽出する。外形ベクトル生成部5は、2つの画像のそれぞれで抽出した閉領域の輪郭に沿って一巡する外形ベクトルを抽出する。3次元データ計算部7は、2つの画像データのそれぞれの外形ベクトルが同じ構造物の外形に対応するとみなして、2つの画像データからその構造物の外形の3次元の位置座標を算出する。
(もっと読む)
画像処理装置、画像処理方法、プログラムおよび記録媒体
【課題】 ユーザの意図に沿うよう画像加工処理の種類およびパラメータを決定し、画像データに対して画像加工処理を施すこと。
【解決手段】 本発明の画像処理装置100は、参照画像それぞれを感性語に対応付けて登録する画像データベース22にアクセスして、入力画像Pに画像特徴が類似する参照画像に対応する感性語を取得する感性語取得手段104と、感性語と、画像特徴が感性語へ与える影響度を表す特徴重み値とを対応付けて登録する感性語データベース24にアクセスして、取得された感性語に対応する特徴重み値を取得する特徴重み値取得手段104と、取得された感性語が表現する印象を実現する度合いを表す感性パラメータ値の入力を受領する受領手段106と、受領された感性パラメータ値および取得された特徴重み値を入力として、画像加工処理の種類および処理パラメータを決定する決定手段108とを含む。
(もっと読む)
ボリュームデータ間の対応付け方法
【課題】処理時間を短縮し、かつ精度よくボリュームデータ間の位置合わせを行う。
【解決手段】参照ボリュームデータ(D1)から探索ウィンドウ(3次元ブロック)を複数抽出する。抽出した複数の探索ウィンドウに設定される基準点に対応する入力ボリュームデータ(D2)の探索ウィンドウ内の対応点を、各探索ウィンドウより抽出したボクセルデータの相関(3次元POC)から探索する。探索した対応点と基準点との対応関係から参照ボリュームデータと入力ボリュームデータとの間の剛体変形パラメータ(回転ずれ、位置ずれを示すパラメータ)を推定し、入力ボリュームデータを剛体変形(回転ずれ、位置ずれを補正)する。剛体変形処理後の入力ボリュームデータと参照ボリュームデータについて、同様にして対応点を探索し、探索した対応点の情報を用いてFFD(Free-Form Deformation)により、入力ボリュームデータをさらに非剛体変形させる。参照ボリュームデータを剛体・非剛体変形させてもよい。
(もっと読む)
コンピュータプログラムとのインタフェース時に深さと方向の検出を可能とする方法およびシステム
【課題】コンピュータプログラムとの相互対話を容易にする装置および方法を提供する。
【解決手段】コンピュータプログラムとのインタフェース時に指し示す方向を検出する方法は、二つ以上の対応する画像取得装置の前に現れた二つ以上の画像を取得することができる。各画像取得装置は座標空間内の取得位置を有している。画像取得装置を、各画像取得装置にとって可視のストロボ信号と同期させることができる。画像内に人が捕らえられたとき、画像内の人の第1体部位および第2体部位を特定し、座標空間内の第1位置および第2位置を割り当てることができる。取得位置から観察するとき、第1位置と第2位置の間の座標空間内で、深さの寸法を含む相対位置を特定することができる。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】効率的にランダムノイズを抑制することのできる画像処理装置を得る。
【解決手段】周波数領域変換処理部30は、原画像1と帯域制限フィルタ処理画像11との第1の差分画像21に対して周波数領域変換を行い、周波数領域変換係数31を出力する。周波数領域変換係数抑制対象領域抽出部40は、周波数領域変換係数31に対し係数抑制の対象領域を抽出する。周波数領域変換係数抑制部50は対象領域の係数を抑制する。周波数領域逆変換処理部60は周波数領域変換係数51の逆変換を行って第2の差分画像61を生成する。ノイズ成分抽出部70は、第1の差分画像21と第2の差分画像61に基づいてノイズ成分71を抽出し、ノイズ除去処理部80は、ノイズ成分71を原画像1から減算してノイズを除去する。
(もっと読む)
撮像装置、撮像方法及びプログラム
【課題】被写体画像との合成用の背景画像の生成を適正に行う。
【解決手段】撮像装置100であって、背景内に動く被写体が存在する背景生成用画像を連続して撮像する電子撮像部2及び撮像制御部3と、電子撮像部により撮像される画角内で被写体画像の位置を指定する選択決定ボタン12bと、電子撮像部により連続して撮像された複数の背景生成用画像のうち、所定枚数の背景生成用画像に基づいて、背景内から動く被写体を消去して被写体画像との合成用の背景画像を生成する背景生成部8dと、を備えている。
(もっと読む)
画像処理装置および画像処理方法
【課題】
三次元ディスプレイのように2個以上のペアを持つステレオ画像についてImage-retargetingを適切に実施する。
【解決手段】
第1の画像データの連結画素のパスを画素勾配エネルギーに基づいて算出し、第1の画像データと第2の画像データのステレオ対応関係に基づいて、第1の画像データの連結画素の各画素に対応する、第2の画像データの各画素を初期探索点として算出し、初期探索点近傍において第1の画像データの画素と第2の画像データの画素の間のエネルギーが最小となる画素を第2の画像データの連結画素のパスとして算出し、エネルギーを用いて第1の画像データの最適連結画素のパスを算出する。
(もっと読む)
701 - 720 / 2,719
[ Back to top ]