
Fターム[5C054CG06]の内容
閉回路テレビジョンシステム (47,623) | 撮像装置の駆動機構の駆動制御 (887) | 関心領域への指向 (770) | 指向のための制御信号 (547) | 映像変化 (117)
Fターム[5C054CG06]に分類される特許
1 - 20 / 117
監視装置、監視方法および監視プログラム
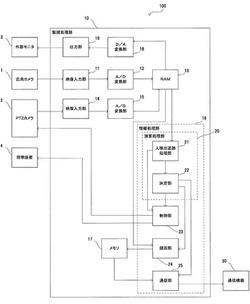
【課題】最も拡大画像の撮像対象とする必要のある人物を、より確実に撮像することができる監視装置、監視方法および監視プログラムを提供する。
【解決手段】第1撮像部1により撮像された第1画像に含まれる人物の行動評価値Nを算出し、算出した行動評価値Nに基づいて、第2画像を撮像する第2撮像部2の撮像対象を決定する演算処理部20と、演算処理部20により決定された撮像対象が第2画像に含まれるように第2撮像部2を調整する制御部23と、を備え、演算処理部20は、第2撮像部2による第2画像の撮像と並行して、第1撮像部1により第1画像が新たに撮像されると、新たに撮像された第1画像における行動評価値Nを再び算出して撮像対象を更新し、制御部23は、演算処理部20により撮像対象が更新されると、更新された撮像対象の第2画像が撮像されるように第2撮像部2を調整する。
(もっと読む)
動体検出装置及びその制御方法、プログラム

【課題】 振動のある環境下においても、振動が終了するのを待たずに、かつ、少ない計算機資源を用いて、動体検出を行うことである。
【解決手段】 撮像画像から動体を検出するための動体検出処理を実行する。撮像画像に基づいて、前記撮像装置に起因する振動を検出する。振動を検出した場合、動体検出可能な位置までワイド側に現在のズーム位置を移動する。
(もっと読む)
撮像監視画面及び全方位撮像画面監視システム
【課題】全方位撮像画面の撮像エリアの外周での映像の分解能が粗い場合でも、鮮明な画像を得られる撮像監視画面及び全方位撮像画面監視システムを提供する。
【解決手段】全方位撮像画面監視システムSは、全方位を動画として撮像可能な固定された第1の撮像手段10と、動画として撮像可能な固定された第2の撮像手段20と、第1の撮像手段10と第2の撮像手段20で撮像した動画を録画する記録手段30と、記録手段30を制御する制御手段40と、第1の撮像手段10、第2の撮像手段20、記録手段30からの撮像を表示する表示手段50と、を備え、第2の撮像手段20は、第1の撮像手段10の撮像領域の外周を撮像する位置に配置されたものである。
(もっと読む)
監視装置、その方法、及び、そのプログラム
【課題】監視対象物が移動しても確実に追従できる監視装置を提供する。
【解決手段】監視対象物を指し示す指示部22と、前記監視対象物を撮像して時系列の画像を取得するカメラ12と、前記時系列の画像から複数の特徴点を抽出すると共に、前記各特徴点の移動量を算出し、予め設定された基準移動量より前記移動量が大きな特徴点の第1の集合の移動先位置Bを予測する予測部14と、前記時系列の画像間の差分に基づいて変化領域を抽出し、前記変化領域の重心位置Oを検出する検出部16と、前記平均移動量が第1の閾値と比較して大きい場合には前記移動先位置Bを指示位置と設定し、小さい場合には前記重心位置Oを指示位置と設定する判定部18と、前記指示部が前記指示位置を指し示すように前記指示部を制御する制御部20とを有する。
(もっと読む)
撮像システム
【課題】広い撮像対象エリアを確保しつつ、撮像画像に含まれる各種物体の正確な認識が可能な撮像システムを提供する。
【解決手段】本発明に係る撮像システム(1)は、広角レンズを有し、予め設定された所定の方向を撮像するように固定された固定撮像手段(5)と、広角レンズの光軸の結像側の延長線を中心に回動可能に設置され、固定撮像手段より画角の小さいレンズを有する可動撮像手段(6)とを備えており、特に可動撮像手段は、固定撮像手段の撮像画角と可動撮像手段の撮像画角とが少なくとも部分的に重複するように設置されていることを特徴とする。
(もっと読む)
画像記録装置
【課題】画像記録装置内の画像を記録する記録媒体には、HDD(Hard Disk Drive)またはSSD(Solid State Drive)のいずれか一方のみが用いられており、それぞれの特徴に応じていずれかが選択されるのみであり、どうしてもそれぞれ苦手な場面が存在した。
【解決手段】本発明によると、記録媒体にHDDとSSDを併用し、それぞれの特徴を生かして、通常記録時にはHDDに、アラーム記録時にはSSDに記録することで、より安全性が高く効率的な画像記録を実現することができる。
(もっと読む)
移動体画像追尾装置
【課題】付加センサを追加せず、追尾性能の劣化を改善する。
【解決手段】実施形態の移動体画像追尾装置は、駆動部、カメラセンサ、追尾誤差検出部、角度センサ、角速度センサ、第1計算部、第2計算部、補正追尾誤差検出部、生成部、および制御部を含む。追尾誤差検出部は、画像データから、移動体の視野中心からのずれ量である追尾誤差を検出する。第1計算部は、追尾誤差と角度とを用いて、移動体の位置ベクトルと速度ベクトルを計算する。第2計算部は、角度からカメラセンサの視軸ベクトルを計算する。補正追尾誤差検出部は、視軸ベクトルと位置ベクトルとの関係および速度ベクトルから、追尾誤差検出値が一定であるサンプリング期間よりも短い期間ごとに補正追尾誤差を計算する。生成部は、補正追尾誤差を使用して移動体を追尾するように駆動部を駆動する角速度指令値を生成する。制御部は、角速度指令値と角速度との差がなくなるように駆動部を制御する。
(もっと読む)
数値制御機器のテレビカメラモニター画面の関連操作方法
【課題】複数のコンピュータシステムのシステムプログラムの変更無しに、簡単に早く操作変更できるようにする。
【解決手段】制御機器の操作方法と、追加したい別の操作方法をテレビモニター画面上で関連付けるようにした。関連付けに使用する、テレビモニター画面は、多くの制御機器で使用され、その機能も簡単で、ほぼ共通の使用方法である。テレビモニター画面上での関連付けの演算は、関連付けの方法として使用し、関連付けの時のみの演算で、演算結果の関連数値を使用する、その関連数値の使用は、そのテレビモニター画面上の操作だけでなく、その関連数値を別の操作機器に関連付けて使用することで、別の制御機器の操作機器で操作出来る。
(もっと読む)
監視領域制御方法
【課題】 監視システムと警備員が存在する監視環境において、監視の隙を作らない事と、撮影する映像中で不要なパン/チルト/ズームを軽減する事の二つを両立させる。
【解決手段】 監視システムが監視領域内での異常状態を検知し、警備員の注目領域を検知した場合に、警備員の注意が払われていない領域が監視領域となるようにパン/チルト/ズーム処理を実行することにより、監視の隙を作らない事と、撮影する映像中で不要なパン/チルト/ズームを軽減する事の二つを両立する事を可能とした。
(もっと読む)
関心領域の動的検知に基づいたシーン状態切換システム及び方法
【課題】関心要素に基づくシーン状態の切換システム及び切換方法を提供する。
【解決手段】関心要素に基づくシーン状態の切換システムは、撮像装置で撮像した現撮像画像を現フレーム画像として入力する入力装置と、前記入力装置から入力される前記現フレーム画像から関心要素の最大可能存在領域を決定する検知装置と、予め定義されたそれぞれのシーン状態及び切換条件に基づいて、前記最大可能存在領域のシーン状態間の切換を行う状態切換装置と、前記状態切換装置により切り換えられた現シーン状態に応じて、前記最大可能存在領域から、前記現シーン状態と一致する関心領域を表示する表示装置と、を含む。
(もっと読む)
動体検知装置及び動体検知プログラム
【課題】画像から迅速に動体を検知できる動体検知装置及び動体検知プログラムを提供することを課題とする。
【解決手段】画像から動体を検知する動体検知装置34であって、カメラ制御実績をカメラ21毎に記憶する第1記憶部38を参照して、カメラ21毎に撮影頻度の高い画角優先で撮影させる手段と、動体検知実績をカメラ毎に記憶する第2記憶部40を参照して、カメラ21毎に撮影した画像を動体検知実績のある範囲優先で動体検知する手段とを有することで上記課題を解決する。
(もっと読む)
撮像装置及びインターホン装置、インターホンシステム
【課題】製造コストの上昇を抑えつつ人物の顔を確実に追跡して撮像する。
【解決手段】子機Sにおいては、顔検出処理部5の顔検出処理実行中にバッファメモリ2に記憶される画像データに対して画像処理部3が調整処理を行っている。したがって、画像処理部3並びに顔検出処理部5を構成するハードウェアが高性能なものでなく且つ顔検出処理に比較的長い時間を要する場合であっても、人物の顔を確実に追跡して撮像することができるとともに、製造コストの上昇を抑えることができる。
(もっと読む)
全周警戒システム
【課題】高解像度カメラの台数に関係なく全ての対象を追尾可能な全周警戒システムを提供するにある。
【解決手段】走行車100に搭載された全周囲センサ50により全周囲を走査して全周囲センサ画像を取得し、全周囲センサ画像中の全ての対象を追尾し、全周囲センサ画像中の対象から操作者が高解像度カメラにより撮影を意図する1又は2以上の撮影対象a,b,…を選択すると、選択された撮影対象a,b,…の三次元位置に基づいて、走行車100に搭載された複数台の高解像度カメラ11,12,13,…のうち撮影対象a,b,…に対して最も近い距離にあるものを当該撮影対象a,b,…にカメラ割当器30にて割り当てるので、走行車100と撮影対象a,b,…との相対的位置の変化に対応して、高解像度カメラ11,12,13,…を切り替えながら撮影対象a,b,…を高解像度カメラにより撮影し続けることができる。
(もっと読む)
特定人物検知システムおよび検知方法
【課題】特定人物検知システムおよび特定人物検知システム方法は、検知の高精度化、即ち、見逃しや誤検知の低減を図る。
【解決手段】撮影画像中から任意の登場人物を検知する手段と、特定人物の一覧と登場人物との特徴照合から類似性を求め、特定人物検知を行う手段を有する、撮像装置と検知装置と端末装置から構成される特定人物検知システムにおいて、登場人物の撮影条件を求める手段と、最類似人物の撮影条件を求める手段と、両条件の比較から次の撮影条件の方向性を判断する手段と、該判断に従い撮像装置を制御する手段と、該制御から得られる複数条件下の撮影画像を用いて特定人物検知を行う手段を設けた。
(もっと読む)
監視システム
【課題】監視領域内の混雑状況に応じて、少ないカメラ台数で効率よく監視を行うことができる監視システムを提供する。
【解決手段】場所を移動可能な監視カメラと、前記監視カメラを制御する制御部とを有する監視システムであって、前記制御部は、監視領域内の監視対象を感知するとともに、前記監視領域内における前記監視対象の混雑度を算出し、前記混雑度が小さい場合には、前記監視カメラを前記監視対象の場所に移動させて監視を行わせ、前記混雑度が大きい場合には、前記監視カメラを巡回させて監視を行わせる。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】外乱の影響によって、撮像器の指向方向にずれが発生することを抑制する。
【解決手段】実施形態によれば、撮像部11にて撮像視野内の目標に関する画像情報を得て、この画像情報を画像処理部にて画像処理することで撮像部の指向方向と目標の方向との差異となる目標方向情報を得て、駆動部12、14にて目標方向情報及び当該駆動部の駆動に関するセンサ情報に基づいて撮像部11の視軸方向を目標の方向に指向させて追跡する目標追跡装置において、センサ情報に基づいて、駆動部自体に内在する外乱の量を算出する外乱量演算手段143と、この外乱量演算手段で得られた外乱の量に基づいて、当該外乱が印加された場合に発生する撮像部の指向方向のずれ量を算出するずれ量算出手段144と、画像処理部から出力される目標方向情報をずれ量で補正する補正手段とを備えた目標追跡装置を提供する。
(もっと読む)
監視カメラを使用する能動的客体追跡装置及び方法
【課題】能動的客体追跡装置及び方法を提供する。
【解決手段】本発明による能動的客体追跡装置は、カメラ部と、上記カメラ部の撮影方向を変更するモータ駆動部と、上記カメラ部を用いて第1の比較映像及び第2の比較映像を順次に取得し、上記第1の比較映像を上記第2の比較映像と比較し、上記第1の比較映像及び上記第2の比較映像に存在する同一の客体の移動方向及び速度を検出し、上記検出された移動方向及び速度に基づいて上記第2の比較映像を受信した後に上記客体の予想移動位置を決定し、上記客体の予想移動位置で上記客体を拡大撮影する制御部とを有する。
(もっと読む)
撮像システム
【課題】 撮影される領域の設定を直感的かつ小さな負荷で実行できる撮像システムを提供する。
【解決手段】 撮像システム1は、車両3の室内を撮影する車内カメラ11と、車内カメラ11にて撮影された映像を表示する表示部15と、操作部17と、システム制御部23と、を有する。操作部17は、3次元位置指定装置41と、操作者位置指定装置43と、位置検出装置45と、からなる。この3次元位置指定装置41は、運転者5が手に持って操作する装置である。操作者位置指定装置43は、運転者5の体に取り付けられる。位置検出装置45は、3次元位置指定装置41および操作者位置指定装置43の3次元位置を検出する。カメラ姿勢制御手段31は、取得した3次元位置の情報に基づいて車内カメラ11の撮影方向を設定する。
(もっと読む)
移動体軌跡表示装置および移動体軌跡表示プログラム
【課題】 撮影領域が可変の撮影手段から得られる撮影画像上の移動体の軌跡を当該撮影画像上に表示する。
【解決手段】 撮影手段としてのPTZカメラから得られる撮影画像上に移動体100が現れると、この移動体100を自動追尾するように、当該カメラのパン/チルト/ズーム動作が制御される。併せて、この自動追尾中のカメラから得られる撮影画像上の移動体100の重心位置に、当該移動体100の現在位置を表す現在位置マーク120が付される。さらに、撮影画像がMフレームずつ更新されるごとに、現在位置マーク120が辿ってきた過去の位置を表す軌跡マーク130が付されると共に、現在位置マーク120を先頭として各軌跡マーク130を時系列で順次結ぶように、軌跡線140が付される。つまり、自動追尾中のカメラから得られる撮影画像上に移動体100の軌跡が表示される。
(もっと読む)
監視カメラ装置、ならびに、その制御方法および制御プログラム
【課題】監視カメラ装置の監視性能を向上させる。
【解決手段】鏡筒3が、その視野が枠F1から枠F2まで移動すると、その後、鏡筒3の回転移動の速度が低減される。視野が枠F2にまで移動したとき、人物を表わす被写体OB1の顔面が含まれるからである。鏡筒3が、その視野が枠F3まで移動され、さらに、枠F3を超え枠F4に向けて移動するように、回転移動されると、鏡筒3の視野に被写体OB1の顔面が、顔認識処理において顔を認識される態様では含まれなくなる。したがって、それ以降の、つまり、顔認識処理において顔を認識されなくたった後の回転移動では、元の所定の速度で鏡筒3が回転移動する。
(もっと読む)
1 - 20 / 117
[ Back to top ]