
Fターム[5C054FC05]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 輝度解析 (433) | N値化処理 (104)
Fターム[5C054FC05]に分類される特許
61 - 80 / 104
障害物検出システム、及び障害物検出方法
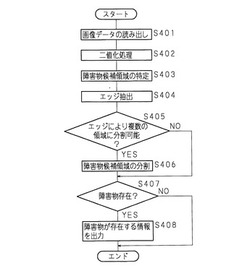
【課題】複数の検出対象物を包含して特定された障害物候補領域をさらに領域分割することにより、より精度良く障害物を検出することができる障害物検出システム、及び障害物検出方法を提供する。
【解決手段】車両の周辺を撮像する撮像装置で撮像した画像データを取得して画像中の障害物の存在を検出する。検出装置は、撮像装置から取得した画像データを二値化処理し、二値化処理された画像データに基づいて障害物候補領域を特定する。エッジを抽出して、抽出されたエッジ又は該エッジを延伸させた拡張エッジにより、特定された障害物候補領域を複数の領域に分割することが可能であるか否かを判断する。複数の領域に分割することが可能であると判断された場合、障害物候補領域を複数の領域に分割し、分割された領域各々に障害物が存在するか否かを判定する。
(もっと読む)
障害物位置算出システム、及び障害物位置算出方法

【課題】視差算出の対象となる対象領域の周辺領域の画像データも含めて視差を算出することにより、より精度良く障害物が存在する位置を算出することができる障害物位置算出システム、及び障害物位置算出方法を提供する。
【解決手段】車両の周辺を撮像する複数の遠赤外線撮像装置で撮像した画像データを取得して画像中の障害物の存在を検出し、障害物の位置を算出する。複数の遠赤外線撮像装置から取得した画像データを所定の大きさの対象領域に分割し、分割された対象領域、及び該対象領域の周囲に存在する周辺領域とで構成される拡張領域を設定する。拡張領域ごとに複数の画像間で相関値を算出し、算出された相関値に基づいて一の画像データ中の拡張領域に対応する他の画像データ中の領域との視差を算出する。視差が略一致する隣接する領域を結合して障害物候補領域として特定し、特定された障害物候補領域の代表点の実際の位置を推算する。
(もっと読む)
監視システム
【課題】監視エリア内に入ってきた、または監視エリア内で検出された物体に、その場所が監視エリアであることを知らしめること、あるいは、入ってはいけないことを伝えることが可能な監視システムを提供する。
【解決手段】監視エリアを撮像する撮像装置と、撮像装置が取得した画像から物体を検出する画像処理装置と、画像処理装置が物体を検出した場合に、照明灯の色を不快色に変更し、スピーカの警報音を不快音に変化させる。また、画像処理装置が物体を検出した場合に、登録されたポジションに物体が存在した時に、照明灯の色を不快色に変更し、スピーカの警報音を不快音に変化させる。
(もっと読む)
対象物検出装置、車両、対象物検出方法、並びに対象物検出用プログラム
【課題】車両のピッチング時に画像上に生じる残像の影響を低減して、車両に搭載された撮像手段により得られた車両周辺の画像から歩行者等の対象物の種類を精度良く判定することができる対象物検出装置、車両、対象物検出方法、並びに対象物検出用プログラムを提供する。
【解決手段】対象物判定手段12は、少なくとも車両10のピッチングが検出された時刻を含む所定期間内に撮像手段2R,2Lを介して取得された複数の画像に対し、該複数の画像から対象物抽出手段11によりそれぞれ抽出された対象物の画像部分の輝度値を、該複数の画像間の対応する画素毎に積算した輝度積算値を画素データとする輝度積算画像を表す輝度積算データを算出する手段と、該算出された輝度積算データが表す輝度積算画像のうちの輝度積算値が所定値以上である部分を抽出する手段とを備え、該抽出された部分の特徴量に基づいて、該対象物の種類を判定する。
(もっと読む)
対象物検出装置、車両、対象物検出方法、並びに対象物検出用プログラム
【課題】車両の旋回時やピッチング時に画像上に生じる残像の影響を低減して、車両に搭載された撮像手段により得られた車両周辺の画像から互いに異なる時刻で抽出された歩行者等の対象物の同一性を精度良く認識することができる対象物検出装置、車両、対象物検出方法、並びに対象物検出用プログラムを提供する。
【解決手段】同一性判定手段16は、少なくとも時刻Taにヨーレートの大きさが所定閾値以上であるとき(又はピッチングが検出されたとき)に、時刻Taに取得された画像における第1の対象物の画像部分の左右の両側部分のうちの、車両10の旋回方向(又はピッチング方向)と逆側のエッジ寄りの部分の特徴量と、時刻Tbに取得された画像における第2の対象物の画像部分の左右の両側部分のうちの、車両10の旋回方向(又はピッチング方向)と逆側のエッジ寄りの部分の特徴量とに基づいて、第1の対象物が第2の対象物と同一であるか否かを判定する。
(もっと読む)
動体追跡装置,動体追跡方法およびその方法を記述したプログラムを格納した記録媒体
【課題】複数の動体を撮像する複数の撮像装置から送られる画像を統合し、各動体の動きを安定して追跡する。
【解決手段】1又は複数の撮像装置を用いて動体を撮像した複数画像データに基づき、各時刻に複数の前記動体の対象状態を予測する手段11と、前記画像データを取得する手段12と、前記動体を写した領域を抽出したシルエット画像を作成する手段13と、シルエット画像と、実世界の三次元構造と、前記撮像装置の内部パラメータ及び外部パラメータと、を用いて、対象状態分布を推定する手段14と、現時刻において最大確率になる対象状態と前時刻において最大確率になる対象状態に基づいて変化ベクトルを計算する手段15と、実世界の三次元構造と前記内部パラメータ及び外部パラメータを保存する手段21と、対象状態の確率的分布を記憶する手段22と、前記変化ベクトルを記憶する手段23と、を用いて、動体を追跡する。
(もっと読む)
車両判別装置及びそのプログラム
【課題】大量の車体静止画像データを車種ごとに判別させる際に、高速処理にて判別できる車両判別装置を提供する。
【解決手段】撮像画像の等間隔の位置の画素を明度成分に変換し、微分フィルターをかけ、求めた変化量の中で一定以上大きいものが何個存在するかをカウントし、そのカウント値に基づいて対象画像に撮像されている車両を判別するので、撮像画像中で撮像される対象物の大きさに従いカウント値も変化し、占有領域の大きいものはカウント値も大きく、占有領域の小さいものはカウント値も小さく、それによって車両を正しく判別することができる。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、および画像処理プログラムを記録した記録媒体、ならびに移動物体検出システム
【課題】対象物の移動の検出精度を落とすことなく、より少ない画素数に対して基準画像と参照画像との間の対応付けに関する画像処理を行うことを可能とする画像処理装置を提供する。
【解決手段】対象物領域設定部12は、撮像部2によって撮影された動画データから、第1の時点での撮像画像を基準画像として取得し、該基準画像中の対象物の画像領域を含む相関窓を基準点との相対位置が特定された状態で複数箇所選択する。移動検出部14は、第1の時点とは異なる第2の時点での撮像画像を参照画像として取得し、基準画像における各相関窓内の画素値の状態と、参照画像における各相関窓内の画素値の状態との相違が最も小さくなる基準点の位置を参照画像において算出することによって、基準画像と参照画像との間の対象物の移動を検出する。
(もっと読む)
車両の周辺監視装置、車両、車両の周辺監視方法、および車両の周辺監視用プログラム
【課題】撮像装置の撮像画像から抽出された対象物の種別が人などの生体であるか否かを高い信頼性で、簡易に判定することができる車両の周辺監視装置を提供する。
【解決手段】撮像装置2R,2Lの撮像画像から人などの対象物を抽出し、その対象物の上下方向における対称性の度合いの高低を判断する(STEP33)。対称性の度合いが高いと判断された対象物は、生体以外の種別であると判定する(STEP33a)。対称性の度合いが低いと判断された対象物は、生体である可能性が高いと判定する(STEP33b)。生体である可能性が高いと判定された対象物については、さらにその対象物が、所定種類の生体(例えば人)であるか否かを該対象物の画像に基づいて判定する(STEP34、35)。
(もっと読む)
車両用方向者検出装置
【課題】昼間であっても、遠赤外線による歩行者の検出精度の向上を図ることができる車両用歩行者検出装置の提供。
【解決手段】車両に搭載された車両用歩行者検出装置であって、車外の遠赤外線画像を撮像する遠赤外線カメラ1と、撮像された遠赤外線画像から歩行者像を含むの可能性がある候補領域を抽出する候補領域抽出部61と、遠赤外線画像に影響を与える車外環境を検出する車外環境検出手段3と、遠赤外線画像の歩行者モデルを車外環境状況と対応付けて記憶したROM4と、車外環境検出手段3によって検出された車外環境に対応する歩行者モデルを、ROM4から抽出する歩行者モデル抽出部62と、候補領域抽出部61によって抽出された候補領域と、歩行者モデル抽出部62によって抽出された歩行者モデルとを対比して、候補領域が歩行者像を含むか否かを判定することにより、歩行者を検出する歩行者判定部63とを備える。
(もっと読む)
車載表示システム
【課題】一次衝突した歩行者等によってドライバの視界が遮られた場合に、車両前方の情報をより確実に取得・提示する。
【解決手段】表示判定部6eは、車両が前方の物体に衝突した場合、ステレオカメラ5から出力された一対の撮像画像のそれぞれに関するフレーム間の時系列的な輝度変化に基づいて、カメラ視界が遮られていないカメラを特定する。表示制御部6fは、表示判定部6eの判定結果に応じて、視界が遮られていないカメラの撮像画像を表示装置7に表示させる。
(もっと読む)
白線認識装置
【課題】光環境の変化にかかわらず、安定した2値化画像を得て白線を精度良く認識できるようにする。
【解決手段】カメラ1の映像信号をA/D変換器2で変換して画像メモリ5に格納し、画像前処理部6においてカメラ画像をグレースケール2値化画像と輪郭強調2値化画像の2値化画像とし、その論理積で生成したAND画像を基に白線認識部で白線を認識する。2値化に際して、路面に対応する開口領域を残してカメラ画像にマスクをかけ、開口領域について作成した明度のヒストグラムからカメラ画像の明るさ分布を判定し、所定の閾値算出基準線をヒストグラムが横切る明度に、明るさ分布に基づく所定のオフセット値を加算して2値化閾値とする。明るさ分布に対応した適切な2値化閾値を求めることができ、これを繰り返すことにより走行中光環境が変化しても常に最適のAND画像が生成される。
(もっと読む)
動き検出装置
【課題】撮像対象となる画像の輝度や当該照射光量等の変化に起因して誤った判定をしてしまう虞れのない動き検出装置を提供すること。
【解決手段】撮像対象の色の状況に応じて、特定色の信号に関する混合比率を高く設定した比率で、撮像カメラから出力される原色系信号乃至補色系信号を混合してなる映像信号を出力する色系信号混合手段と、色系信号混合手段から供給された映像信号から、近接乃至隣接する関係にある所定の両単位領域に係る各映像信号のレベルの差分に対応した差分データを得る差分データ生成手段(3a,3b)と、一定の時間間隔をおいた両時点での上記差分データの比較値に基づいて、上記単位領域に係る映像信号の傾斜が逆になるときに検出出力を発する検出手段(5)と、この検出手段の出力に依拠して上記映像信号に係る上記撮像対象の動きを表わす判定出力を得る判定手段(6)とを備える。
(もっと読む)
画像処理装置
【課題】動画像中からの特定対象の抽出の成否やノイズの検出に起因する画像上のちらつきを低減し、動画像中から安定して特定対象を抽出することが可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、移動体に搭載され移動体の周囲を撮像する撮像装置21と、処理プログラムに基づいて撮像装置21により時間間隔をおいて撮像された複数枚の画像Iに画像処理を施して画像中から特定の対象Pを抽出し特定の対象Pが抽出された出力画像Oを形成する画像処理部3と、画像処理部3から出力された現在から所定フレーム前までの出力画像Oの各画素の輝度値を重み付けして重ね合わせて結果画像Rを形成する重ね合わせ処理部4とを備え、重ね合わせ処理部4は、移動体の移動状態に基づいて出力画像Oの重ね合わせの条件を決定する。
(もっと読む)
移動物体検出装置および移動物体検出方法
【課題】特定の移動物体がカメラの視野内で長時間にわたって停止したような場合であっても、移動物体を正しく検出することが可能な移動物体検出装置を提供する。
【解決手段】現画像入力部10と、背景画像作成部30と、差分画像作成部51と、移動物体を認識する車両認識部54と、停止物体を認識する停止車両認識部56と、第1の停止物体が認識された後、第2の停止物体もしくは移動物体と第1の停止物体との間の距離が所定距離よりも近い場合、両者は同一であると認識する同一性認識部とを有し、背景画像作成部30は、第1の停止物体が認識された場合、第1の停止物体を含む領域を有する現画像の領域を背景画像中に取り込むことで更新済み背景画像を作成し、同一性認識部によって同一であると認識された場合、更新済み背景画像の領域を現画像もしくは背景画像に基づいて復元する。
(もっと読む)
車両の周辺監視装置
【課題】複数の撮像手段を介して取得される画像から車両周辺の対象物を検出する際に、検出対象物と背景対象物とが基準画像上で重なる可能性を低減して、対象物を精度良く検出することができる車両の周辺監視装置を提供する。
【解決手段】車両10に搭載された撮像手段2R,2Lを介して取得した画像から、車両10の周辺に存在する対象物を検出する。撮像手段2R,2Lを介して取得された画像のうちの所定の基準画像に対して、対象物を抽出する処理を実行する対象物抽出手段1と、車両10の走行環境を検出する走行環境検出手段1と、検出された走行環境に応じて対象物抽出手段1の処理で使用する基準画像を新たに選択する基準画像選択手段1とを備える。
(もっと読む)
駅ホーム監視システム
【課題】人と人の重なりなどホーム上における事情を考慮せずに高精度の監視を行う。
【解決手段】撮像を行って画像情報を得る複数の赤外画像式撮像装置である撮像装置1−1〜1−nと、前記撮像装置1−1〜1−nを駅ホーム監視を行う撮像位置と監視を行わない退避位置との間において移動させるカメラ移動装置3−1〜3−nと、前記撮像装置1−1〜1−nから得られる画像情報を処理して列車の軌道に人の有無を検出する画像処理装置2とを具備する。カメラ移動装置3−1〜3−nは、列車が通過する軌道上の位置から、列車の通過を妨げない位置までの間において移動させる。
(もっと読む)
監視装置
【課題】背景動体による変動領域と侵入者による変動領域とを適確に弁別し、背景動体の前方に出現した侵入者を高い確度で検出することを可能とする。
【解決手段】基準時に監視空間を撮像して取得した背景画像と、前記基準時とは異なる時刻に監視空間を撮像して取得した入力画像と、の差分値が所定の変動閾値以上である変動画素を求める背景差分処理部14と、差分値が同一極性である変動画素が所定の判定閾値以上に密に存在する領域を抽出する領域分類部16と、抽出された領域に基づいて侵入物体の有無を判定する侵入者判定部18と、を備える監視装置によって上記課題を解決することができる。
(もっと読む)
物体検出装置
【課題】物体検出対象となる画像に含まれる物体の画像を検出する物体検出装置で、TVカメラの光軸方向や画角が変化した場合においても、正確な物体検出を行う。
【解決手段】物体検出対象画像視野変化検出手段が物体検出対象となる画像の視野に関する変化(光軸方向や画角の変化)を検出し、検出条件設定手段が物体検出対象画像視野変化検出手段により検出される変化に基づいて、物体の画像を検出するために使用される検出条件を設定し、物体画像検出手段が検出条件設定手段により設定される検出条件を使用して、物体検出対象となる画像に含まれる物体の画像を検出する。
(もっと読む)
画像監視記録装置及び画像監視記録システム
【課題】監視領域内での人物の動きから危険の状況を認識し、その認識した危険の状況に応じて通報先や画像記録の仕方などを異ならせることを可能にする。
【解決手段】人物の危険の度合いに応じた複数の異なる特定の動きの画像が、テンプレート画像として、画像メモリ106に登録されている。CCD200の監視領域の動画像信号が画像認識処理部105に供給され、フレームの画像毎に監視領域内での人物が抽出され、画像メモリ106のテンプレート画像と比較されてこの人物の動きが特定の動きであるかどうか、また、どの特定の動きであるかが判定され、この判定により、人物の動きが表わす危険の度合いが認識される。この認識があると、CCDカメラ200からの動画像信号が大容量記録部108に記録されるが、この認識結果(危険の度合い)に応じて記録時間が指定され、また、この認識結果に応じて、ルータ500やWebを介した異常の通報先を異ならせる。
(もっと読む)
61 - 80 / 104
[ Back to top ]