
Fターム[5C054FC05]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 輝度解析 (433) | N値化処理 (104)
Fターム[5C054FC05]に分類される特許
81 - 100 / 104
侵入者監視方法および装置
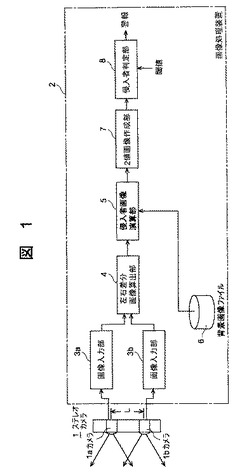
【課題】本発明の目的は外光による誤報を防止して侵入者を検知することを簡単な処理で行える侵入者監視方法および装置を提供することにある。
【解決手段】2台のカメラ1a、1bからなるステレオカメラ1は監視対象範囲への侵入者を撮像する。左右差分画像算出部4はステレオカメラ1で撮像した右画像と左画像の差分を採り左右差分画像を求める。侵入者画像演算部5は左右差分画像と予め定めた設定背景画像との差分を採り侵入者画像を抽出する。設定背景画像は右画像の右背景画像と左画像の左背景画像の左右背景差分画像である。侵入者判定部8は侵入者画像を2値化した2値化侵入者画像の領域が閾値より大きいときに侵入者と判定する。
(もっと読む)
画像処理装置、画像処理装置のはみ出し検知方法およびプログラム

【課題】ビデオカメラで撮影された画像から人物または人物の顔がはみ出したことを検知できる画像処理装置、そのはみ出し検知方法およびプログラムを提供する。
【解決手段】撮像手段31,32は対象物を含む画像を取得する。距離算出手段35は、撮像手段31,32で画像が取得されると、撮像手段31,32から、その画像の画像中央部に映っている物体までの距離を算出する。信頼性判断手段34は、距離算出手段35で求められる距離の信頼性が所定値以上に高いか否か判定する。距離判断手段36は、距離算出手段35で得られた距離が所定の閾値以下であり、かつ信頼性判断手段34で信頼性が高いと判断されると、その画像から対象物がはみ出していると判断する。
(もっと読む)
画像処理装置
【課題】画像における歩行者の高精度な識別を図る。
【解決手段】入力特徴ベクトル生成部23bは、物体の大きさ、物体の上部形状、および、物体の側部形状を要素として含む入力特徴ベクトルuを、物体の画像に基づいて生成する。カーネル判別分析演算部23cは、入力特徴ベクトルに基づいてカーネル判別分析のための演算を行うことにより、判別空間へ写像されたベクトルyを生成する。物体判別部23dは、このベクトルyが判別空間上所定の領域内にあるか否かに応じて、物体が歩行者であるか否かを判別する。
(もっと読む)
監視システム
【課題】 監視対象にセンサなどを組み込むことなく、異常発生などを検出することを実現するとともに、その監視対象の設置場所や遠隔地への異常発生などの報知や、その異常状態の把握を可能にすることにより、定常状態から外れたときに迅速に対処できるようにして、監視対象を容易に定常動作させることのできる監視システムを提供すること。
【解決手段】 機器100の動画像を撮影する監視カメラ11と、その撮影画像から注目領域を切り取って2値化処理することにより異常発生などの非定常状態を抽出したときに、その動画像を記録装置内に記録保持するのと同時に、報知信号や報知メッセージを生成してモニタ13に表示出力などするとともに管理センタに送信するPC12と、を備える。
(もっと読む)
対象物探索装置
【課題】 ガードレールの端部を的確に検出して、人物と誤判定してしまうのを防止する。
【解決手段】 人物を含む候補領域のプロジェクション値θから得られるヒストグラム(実線で示す)では、左辺40L、右辺40R側がしきい値θthより低く、しきい値を越える領域が上方へ凸となっており、左右の対象性があるといえるが、ガイドレールの端部の画像を含む候補領域のプロジェクション値から得られるヒストグラム(破線で示す)では、左辺側がしきい値よりも小さいにもかかわらず、右辺側がしきい値を越えており、左右が非対称となっている。ここから、候補領域の左辺側と右辺側のプロジェクション値としきい値から、非対称性を有すると判断できるときには、該当候補領域内の画像をガードレールの端部の画像であると判定することができる。
(もっと読む)
車載霧判定装置
【課題】 霧がかかった画像であるかどうかを判定するための画像処理の負荷を軽減させつつ、霧判定の精度を確保する。
【解決手段】 車載カメラによって撮像された画像内において車両が走行している道路の形状を白線認識等に基づいて決定し(S100)、決定した道路の形状に基づいて、画像内において車両から所定の遠方距離にある道路上の領域(遠方道路領域)を決定し、S300で画像処理する領域をその遠方道路領域とする。このようにすれば、車載カメラ12により撮像された画像全体を解析するのに比較して画像処理の負荷が軽減する。また、遠方道路領域は、画像内において車両から所定の遠方距離にある道路上の領域であり、通常、道路は遠方まで続いていることから、その領域には遠方部分が撮像されている可能性が高いので、霧判定の精度が確保される。
(もっと読む)
夜間に道路を検出する方法及びシステム
赤外線感知カメラから得られる画像信号における道路の特徴を検出する方法が与えられる。その方法は、要約すると、その代表的な温度に応じてフレームにおけるピクセルにバイナリ値を割り当てることにより画像フレームを処理するステップを有し、その後、互いに同様なバイナリ値が割り当てられているピクセル領域を特定するためバイナリマスクを空間的に解析するステップを有する。道路の特徴は、相互に類似するバイナリ値を持つことが特定された領域の解析と、ユーザに提供される画像フレームに関連する道路の特徴の視覚的な識別とから連続的に見つけられる。  (もっと読む)
(もっと読む)
車両用画像処理装置
【課題】 本発明は、立体物検出と白線検出のそれぞれの処理に適した画像を得ることができる車両用画像処理装置の提供を目的とする。
【解決手段】 カメラは、白線の検出に適するように算出されたカメラ制御値をフレーム毎に適用して撮像するとともに、立体物の検出に適するように算出されたカメラ制御値をフレーム毎に適用して撮像する。撮像したフレームは、フレームカウンタと撮像する際に適用したカメラ制御値が付与された上でステレオECUに送信され、ステレオECUはその付与されたフレームカウンタに応じて白線用フレームと立体物用フレームを区別する。ステレオECUは、区別がされたフレームに基づいて、白線用検出若しくは立体物用検出を行うとともに、白線用カメラ制御値若しくは立体物用カメラ制御値を算出して、その算出されたカメラ制御値をカメラに送信する。
(もっと読む)
顔画像抽出装置及び顔画像抽出方法
【課題】少ない演算量で監視に必要な顔画像を確実に取得することのできる顔画像抽出装置及び顔画像抽出方法を提供する。
【解決手段】入力された映像をメモリに蓄積し、前記入力映像をフレームレート変換手段で時間方向に間引いてフレームレートを変換し、前記メモリ又は前記フレームレート変換手段からの入力画像から人物の顔を抽出し顔画像を出力し、前記顔画像を所定の方法で評価して評価値を算出し、算出された前記評価値を蓄積し、蓄積された前記評価値から最も高い評価値が得られると考えられる範囲を決定し、前記メモリに該当する範囲の映像の再生を指示し、算出された前記評価値の中から最も高い評価値を選択し対応する顔画像を出力する。
(もっと読む)
火炎可視化装置
【課題】屋外であっても無色・透明の火炎の可視化ができる装置であって、小型であり且つコスト性に優れた火炎可視化装置の提供。
【解決手段】OH基又は水蒸気の発光スペクトルに透過波長中心を有する第1の光学バンドパスフィルターと、その透過光を撮像する撮像素子からなる第1の撮像手段と、OH基又は水蒸気の発光スペクトルと近接し、且つ、透過する光の波長域が重ならない第2の光学バンドパスフィルターと、その透過光を撮像する撮像素子からなる第2の撮像手段と、監視対象空間からの光を第1および第2の撮像手段へ導く集光手段と、演算手段と表示手段を有する画像処理部とを備え、画像処理部は、第1の撮像手段により得られた画像と第2の撮像手段により得られた画像との差分画像を抽出し、二値化し、着色した画像を第2の撮像手段により得られた画像に重畳表示することで背景画像上に火炎を可視化することを特徴とする火炎可視化装置。
(もっと読む)
映像フレーム内におけるスプリアス領域の識別
【課題】映像フレーム内におけるスプリアス領域の識別
【解決手段】
デジタル映像監視システムにおいて、映像シーケンスにおいて動いているオブジェクトを表す前景領域を識別するために幾つかの処理段階が採用される。現在のフレーム内の候補オブジェクトと1つ以上の以前のフレームにおいて既に識別されているオブジェクトとの間の対応性を識別するためにオブジェクト追跡段階5も提供される。この方法により、前記前景オブジェクト又は各前景オブジェクトによってとられる経路を計算すること及びこの経路情報を軌跡データベースに格納することが可能である。追跡性能を向上させるために、オブジェクト追跡段階5は、特定のオブジェクトを追跡すべきかどうかを決定する状態遷移オブジェクト管理方式を採用する。前記オブジェクト管理方式の一部として、動き上の特徴に基づいて識別されるスプリアスオブジェクトが前記システムから削除される。この削除は、例えばノイズ又はランダムな動きを表している可能性がある不要なアーティファクトの追跡に貴重な処理資源が浪費されないようにする。
(もっと読む)
移動物体抽出用画像作成方法
【課題】 屋外の使用にも耐え、さらにマスク領域の設定を不要とする移動物体抽出用画像の作成方法を提供すること。
【解決手段】 監視用テレビカメラから得られる画像から動く物体を検出するときの移動物体抽出用画像作成方法であって、前記監視カメラからの画像を時系列に所定の時間間隔で複数枚記憶し、基準となる画像と該基準となる画像よりも前に記憶された画像とを所定の時間間隔毎に複数枚の差分画像を算出し、該複数枚の差分画像の論理積画像を得て、該論理積画像を所定閾値で二値化処理して二値化処理画像を得て、該二値化処理画像を多数決処理して移動物体を抽出するための画像を作成する。
(もっと読む)
車両監視方法及び特定文字パターン認識装置及び車両監視システム
【課題】 車両の特定文字パターン認識による車両監視方法及び特定文字パターン認識装置及び車両監視システムに関し、特定文字パターンの認識結果に応じて伝送データ量を制御する。
【解決手段】 撮影部による撮影画像データを処理して車両の特定文字パターンを認識する認識装置7と、複数の認識装置と回線6を介して接続したセンタ1とを含み、認識装置7は、撮影画像データを基に車両特定文字パターンの認識処理を行い、文字パターンが認識できない時は、撮影画像データから車両領域を切出して低圧縮率で圧縮し、文字パターンの一部のみ認識できた時は、特定文字パターン領域を切出して低圧縮率で圧縮し、文字パターンの全部を認識できた時は、特定文字パターン領域を切出して高圧縮率で圧縮して、記録又は送出し、センタ1は、認識装置からの圧縮データを回線6を介して受信して格納する管理テーブル4及び表示する表示部3を有する。
(もっと読む)
車両周辺監視装置
【課題】赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】人工構造物判定処理では、グレースケール画像において、縦方向の各縦位置J毎での横方向に沿った輝度値の平均値の縦位置Jに応じた変化(横平均輝度プロジェクション)F(J)と、F(J)での縦位置Jに応じた傾きの変化(微分係数)S(J)とに基づき、最大ピーク位置j_enを検知する。最大ピーク位置j_enを含み、横平均輝度プロジェクションF(J)と、グレースケール画像において、横方向の各横位置I毎での縦方向に沿った輝度値の平均値の横位置Iに応じた変化(縦平均輝度プロジェクション)W(J)とにおいて、輝度値が平均輝度値AVE_Hよりも大きい領域の縦幅c_Hと横幅c_Wとの縦横比が所定上限値R_THUよりも大きい、あるいは、所定下限値R_THLよりも小さい場合には、2値化対象物が人工構造物であると判定する。
(もっと読む)
車両周辺監視装置
【課題】赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】少なくとも2値化対象物OBの下端部を含む所定の対象領域(マスク)OA内にて検出した水平エッジの幅方向での含有率RATEが所定閾値RATE_TH(例えば、80%等)よりも大きい場合には、2値化対象物が、2値化対象物の下端部に、例えば人体の肩部の横幅よりも過剰に大きな横幅を有する構造物を備える人工構造物であると判定し、含有率RATEが所定閾値RATE_TH以下である場合には、2値化対象物が、2値化対象物の下端部に、例えば人体の肩部の横幅よりも過剰に長い横幅を有する構造物を備える人工構造物以外であると判定する。
(もっと読む)
不良検査装置及びPTP包装機
【課題】PTPシートの製造過程における不良を検査するに際し、検査精度の飛躍的な向上を図ることのできる不良検査装置、及び、PTP包装機を提供する。
【解決手段】不良検査装置21は、照明装置22、カメラ23及び画像処理装置24等を備えている。照明装置22により、錠剤5及び容器フィルム3に対し、赤外光が照射され、当該光によって錠剤の欠け等に関する透過光検査が実施される。照明装置22が角度透過率制御フィルタ29を具備しており、当該角度透過率制御フィルタ29によって、容器フィルム3越しにカメラ23に直接入射する光が除去又は減光させられる。すなわち、光源と、カメラ23のレンズ部中心を結ぶ直線上の光並びに当該直線に対しレンズ部の画角以内の光が、全反射される。これにより、光源からの光のカメラ23への直接の入射が制限され、カメラ23に入射される光が強すぎることに起因する不具合を防止できる。
(もっと読む)
車両周辺監視装置
【課題】第1画像及び第2画像から対象物の視差を求める際のパターンマッチングを迅速且つ正確に行う。
【解決手段】右位置PRに配置されたエイミングターゲット134a〜134cを右の赤外線カメラ16Rによって撮像して右グレースケール画像54を得る。左位置PLに配置されたエイミングターゲット134a〜134cを左の赤外線カメラ16Lによって撮像して左グレースケール画像58を得る。予め設定された右画像の切り出し領域162Rにおけるエイミングターゲット134a〜134cのy座標の平均値yraを求め、左画像の切り出し領域162Lにおけるエイミングターゲット134a〜134cのy座標の平均値ylaを求める。平均値yraと平均値ylaの差分Δyaを求め、切り出し領域162Lをy方向へ差分Δyaだけ移動設定する。
(もっと読む)
車両周辺監視装置
【課題】 赤外線画像上において歩行者と人工構造物とを的確に区別して抽出する。
【解決手段】 ランレングスデータに変換された画像データから検出される2値化対象物の上端位置OBJ_TOPと、エッジ検出位置j_FL_TOPとの差分(|OBJ_TOP−j_FL_TOP|)が所定閾値DIFF_H_THよりも大きい場合には、2値化対象物が縦方向(例えば鉛直方向上方)に伸びる人工構造物であると判定する。2値化対象物の下端位置OBJ_BOTと、エッジ検出位置j_FL_BOTとの差分(|OBJ_BOT−j_FL_BOT|)が所定閾値DIFF_H_THよりも大きい場合には、2値化対象物が縦方向(例えば鉛直方向下方)に伸びる人工構造物であると判定する。
(もっと読む)
人物検出装置及び方法
【課題】 車両から撮像した熱画像を用いて、周囲の気温や背景物体等に拘わらず、確実に人物を検出することができる人物検出装置及び方法を提供する。
【解決手段】 物体の温度に相当する輝度値の画素からなる熱画像を撮像する処理(S1,S2)と、熱画像のうち、人物の温度に相当する輝度値の上限しきい値と下限しきい値との範囲内の画素とそうでない画素とを区別した2値化画像を作成する処理(S3,S4)と、2値化画像を参照して、人物の温度に相当する輝度値の上限しきい値と下限しきい値との範囲内の画素群が所定面積以上となっている領域を検出する処理(S5,S6)と、検出された領域のうち、所定の距離しきい値以内に存在する一又は複数の領域を人物候補領域としてグループ化する処理(S7)と、グループ化されてなる人物候補領域の面積及び形状に基づいて、当該人物候補領域の物体が人物であるか否かを判定する処理(S8)とを有する。
(もっと読む)
電子内視鏡装置及び内視鏡画像処理装置
【課題】観察部位の画像の観察性を損ねることなく、内視鏡の先端部を操作する方向を容易に把握することができ、操作性のよい電子内視鏡装置を提供する。
【解決手段】挿入部から伝達された複数の管路を有する観察部位の光学像を撮像する撮像手段17と、撮像信号を信号処理して画像信号を生成する信号処理手段25と、画像信号を処理して観察部位の画像における管路領域と管路の数とを特定する情報処理手段32と、特定された管路領域と画像信号とを組み合わせて、管路領域を強調した観察部位の画像を生成する加工手段30と、加工手段で得られた画像を表示する表示部4と、表示部に表示された複数の管路から特定の一つの管路を選択する選択手段39と、選択された特定の管路へ挿入部を挿入するための内視鏡操作情報を生成する操作情報生成手段38とを備え、生成された内視鏡操作情報を前記表示部に表示する。
(もっと読む)
81 - 100 / 104
[ Back to top ]