
Fターム[5C054FC14]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 輪郭抽出 (304)
Fターム[5C054FC14]に分類される特許
1 - 20 / 304
車両周辺撮影装置および車両周辺画像の処理方法
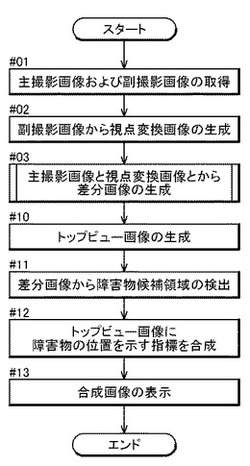
【課題】高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供する。
【解決手段】車両の周辺の情景を撮影する第1カメラと、第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、が車両に搭載されている。第1カメラと第2カメラとの一方を主カメラとするとともに他方を副カメラとし、主カメラにより撮影された画像を主撮影画像とするとともに副カメラにより撮影された画像を副撮影画像とする。視点変換部13は、副撮影画像を主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する。画像差分部14は、比較情報として主撮影画像と視点変換画像との差分画像を生成する。
(もっと読む)
横断歩道検出装置

【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
車両周辺監視装置
【課題】本発明は、画像認識における誤検出、あるいは、不検出の発生時、発生要因のデータを学習し、誤検出や不検出を繰り返さず、認識精度を向上することができる車両周辺監視装置を提供する。
【解決手段】撮影手段1で入力された画像に対して、対象物検出処理部3によって検出された対象物について、誤検出、あるいは、不検出の場合、ユーザ入力手段6により出力手段7上で該当領域を指定する。画像認識DB修正部4は、誤検出領域の辞書データを修正し、修正したデータを画像認識DB5の辞書データに格納する。
(もっと読む)
偏光画像による車両位置検知方法及びシステム
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
画像表示方法および装置
【課題】蛍光画像などの特殊画像を表示する画像表示装置において、特殊画像における発光部分の被観察部における位置を正確に把握でき、かつ発光部分の階調などの情報を正確に表した画像を表示する。
【解決手段】可視光の被観察部への照射によってその被観察部から発せられた光に基づく可視画像と可視光とは異なる波長帯域の特殊光の被観察部への照射によってその被観察部から発せられた光に基づく特殊画像とを取得し、可視画像が有する画像情報のうちの一部の情報を抽出して抽出画像を生成し、その生成した抽出画像を特殊画像上に重ね合わせた重ね合せ画像を生成し、その生成した重ね合せ画像を表示する。
(もっと読む)
画像処理装置およびこの画像処理装置を備える電子カメラおよび画像再生装置
【課題】姿勢センサを用いることなく撮像画像の水平度を把握することのできる画像処理装置ならびこの画像処理装置を備えた電子カメラおよび画像再生装置を提供する。
【解決手段】画像処理回路(画像処理装置)は、縦方向および横方向に配列された複数画素により構成された撮像画像について、縦エッジを抽出し、縦エッジの方向と縦方向とが一致する度合いを水平度パラメータとして算出する。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
ネットワークカメラシステム及びネットワークカメラシステムの制御方法
【課題】ネットワークカメラの交換時に、カメラ設定に係る設定情報を自動更新できるようにする
【解決手段】撮影装置と、前記撮影装置からの映像データを、ネットワークを介して受信して表示部に表示するクライアント機とを有するネットワークカメラシステムにおいて、前記撮影装置により取得した映像データを元に特徴情報を抽出するとともに、前記抽出した特徴情報を記憶媒体に記憶しておき、前記記憶媒体に記憶した特徴情報と、新たに抽出した特徴情報とを比較し、比較の結果に基づいて、プリセット位置、マスキング位置、動き検出位置のうち、少なくとも一つを含む設定情報を修正できるようにすることにより、ネットワークカメラの交換時に、位置ずれが発生しても自動的に修正できるようにする。
(もっと読む)
映像監視システム及び人数推定方法
【課題】撮像された画像内に存在する人物の人数を推定することが可能な映像監視システム及び人数推定方法を実現する。
【解決手段】撮像機器から取得した映像信号に基づく画像データから方向に関する特徴を算出するとともに、前記方向に関する特徴についてのヒストグラムを所定の大きさの時空間において算出した時空間ヒストグラムを作成し、前記時空間ヒストグラムから動きの複雑さを表す時空間評価値を算出するとともに、前記時空間評価値の時間変化を算出し、前記時空間評価値の時間変化から画像内または特定領域に存在する人数が2人以上の所定人数以上か否かを推定する。
(もっと読む)
画像監視装置
【課題】監視空間内において顔を隠蔽している人物を不審者として判定する画像監視装置において、顔を隠蔽した者が監視空間を走り抜けて撮像範囲外に消失した場合でも不審者とその他の人物を確実に識別可能とする。
【解決手段】画像監視装置1は、撮像部2にて取得された入力画像中から人物領域を抽出し、さらに人物領域周辺部から頭部候補領域を抽出する。そして抽出された頭部候補領域が顔隠蔽者か否か判定し、複数画像中で顔隠蔽者が所定回数検出された場合に不審者と判定するが、顔隠蔽者が重要監視物方向に移動した後、消失した場合は上記所定回数に満たない場合でも不審者と判定する。
(もっと読む)
画像監視装置
【課題】 照明環境により画像情報に人物の顔の情報が不足する場合であっても当該人物が不審者であるか否か判定可能とする。
【解決手段】 監視空間において顔を隠蔽した不審者を検出する画像監視装置であって、周期的に監視空間を撮像して監視画像を取得する撮像部と、予め人物の顔特徴情報を記憶するとともに撮像部が取得する監視画像を記憶する記憶部と、監視画像から人物の頭部に相当する入力頭部領域を抽出する頭部抽出部と、入力頭部領域が顔の特徴情報を有しているか顔特徴情報を用いて判定する顔特徴判定部と、周期的に取得される複数の監視画像間において対応する入力頭部領域を追跡する追跡部と、顔特徴判定部にて入力頭部領域に顔の特徴情報無しと判定された場合、追跡部にて対応付けされた過去の入力頭部領域を用いて、顔を隠蔽した不審者であるか否かを判定する不審者検出部と、を備える。
(もっと読む)
画像処理判定装置
【課題】各種の外部機器から出力される画像データに基づいて、各種の情報を運転者に的確に認識させる。
【解決手段】画像処理判定装置10のエッジ画像生成部21は、端末装置14、ナビゲーション装置15、撮影装置16などの外部機器から出力される表示データに含まれる画像から複数のエッジを抽出する。そして、抽出した複数のエッジから外部機器の特性に応じた所定の選択方法により所定のエッジを選択してエッジ画像を作成する。
(もっと読む)
画像監視装置
【課題】 頭部領域の数を用いて複数人で現れる強盗などの不審者を検出する場合に、肩部など誤検出要因の影響を低減した画像監視装置を提供する。
【解決手段】 監視空間における非常事態を検出する画像監視装置であって、周期的に前記監視空間を撮像して監視画像を取得する撮像部と、前記監視画像から人物の頭部に相当する入力頭部領域を抽出する頭部抽出部と、前記入力頭部領域の数に基づき前記監視空間内の人数を検出する人数検出部と、前記検出した人数が所定人数以上であれば非常事態と判定する非常判定部と、を備え、前記人数検出部は、前記頭部抽出部にて抽出された入力頭部領域について所定距離以内に他の入力頭部領域が存在する場合、何れか一方の領域をカウントフラグ無効とし、当該カウントフラグが無効に設定されていない入力頭部領域に基づき前記監視空間内の人数を検出する。
(もっと読む)
対象物追跡装置および対象物追跡システム
【課題】撮像画像中の対象物の追跡をより確実に行うことを可能にする。
【解決手段】テンプレートマッチングが成功して先行車両の追跡が継続されるごとに、新規追跡画像を重ねて合成していくことで新たに合成画像を生成していくとともに、新たに合成画像を生成する場合には、過去合成画像に追跡の継続回数に応じた重みを付けながら、新規追跡画像を重ねてさらに合成していく画像重畳合成部25と、画像重畳合成部25で生成された合成画像に対してエッジ検出を行って、先行車両の端部の位置を決定する車両端決定部27と、車両端決定部27で決定した端部の位置をもとに、テンプレートを更新するテンプレート更新部28とを備え、テンプレートを更新した場合は、更新後のテンプレートとのテンプレートマッチングを繰り返すことで先行車両の追跡を行う。
(もっと読む)
車載用表示装置
【課題】給電装置と充電器とが接近した場合においても、給電装置と充電器との位置合わせをする際の案内を行うこと。
【解決手段】車載用表示装置100は、地上の給電装置より非接触方式で車載蓄電池を充電する充電器を有する車輌に搭載される。カメラ101は、車輌の周囲の画像を撮影する。給電装置位置検出部102は、カメラにより撮影した周囲の画像における給電装置の相対位置を検出する。表示部105は、充電器の絶対位置及び給電装置位置検出部102により検出した給電装置の相対位置を、カメラ101により撮影した画像と共に一画面に表示する。
(もっと読む)
対象物追跡装置、対象物追跡方法、および制御プログラム
【課題】追跡対象の追随性と処理速度の高速化を両立できる対象物追跡装置を実現する。
【解決手段】この物体追跡装置は、第1フレームにおいて対象物の詳細輪郭モデルを生成する詳細輪郭モデル生成部30と、第2フレームにおいて複数の探索位置を設定する探索位置設定部31と、上記複数の探索位置の各々において上記詳細輪郭モデルからラフ輪郭モデルを生成するラフ輪郭モデル生成部32と、上記ラフ輪郭モデルの上記詳細輪郭モデルに対する尤度を判定する尤度判定部33と、上記尤度判定部33により判定された尤度に基づいて、上記複数の探索位置の中から探索位置を絞り込む探索位置絞込部34と、上記探索位置絞込部により絞り込まれた探索位置の中から、上記第2フレームにおける上記対象物の位置を特定する対象物位置特定部36とを備える。
(もっと読む)
画像処理装置、画像表示システム及び画像処理方法
【課題】不要な指標の表示を防止する。
【解決手段】画像表示システム10では、物体検出部22aが、撮影画像中の検出領域に存在する物体データを検出する物体検出処理を周期的に実行する。また、対応判定部22bが、直近の物体検出処理で検出された物体データと、管理テーブル24bに登録された過去の物体検出処理で抽出された物体データとを対応付ける対応判定処理を実行する。そして、第1削除部22cが、対応付けできない回数が所定条件を満足する物体データを管理テーブル24bから削除する。さらに、第2削除部22dが、検出領域DAの外縁に到達した物体データを、管理テーブル24bから削除する。そして、枠重畳部22eが、管理テーブル24bに登録されている物体データの位置を示す強調枠を撮影画像に重畳する。したがって、検出領域の外縁に到達した物体データの強調枠が表示されない。
(もっと読む)
物体検出装置、および、物体検出方法
【課題】撮影画像中の物体の物体像を確実に検出することを目的とする技術に関する。
【解決手段】
撮影画像に基づいて、カメラの光軸の実際の方向を示す情報を導出し、カメラの光軸の基準の方向を示す情報とカメラの光軸の実際の方向を示す情報との差に応じて、撮影画像中において検出領域とする範囲を変更する。これにより、物体の物体像の検出領域を撮影画像中の適正な範囲に設定でき、検出対象とすべき物体の物体像を確実に検出できる。
(もっと読む)
映像監視装置
【課題】夜間や霧の発生等が原因でカメラの映像が不鮮明である場合でも、カメラにより撮影されている場所を容易に把握することができる映像監視装置を得ることを目的とする。
【解決手段】画角制御部12からカメラ11のPTZ値を取得して、データベース15から上記PTZ値に関連付けられている輪郭データ及び表示座標を取得するデータ取得部14bを設け、映像出力部16が、カメラ11から出力された映像内の上記表示座標に、データ取得部14bにより取得された輪郭データが示す輪郭を表す線を重畳し、輪郭重畳後の映像を出力する。
(もっと読む)
車両用周辺監視装置
【課題】移動体検出のための画像処理負荷を効率的に低減しつつ誤検知を低減する車両用周辺監視装置を提供する。
【解決手段】移動体検出部は、ソナーが障害物を検出していないときの近接領域Aの輝度(路面の輝度と推定)と、遠方領域B、Cの輝度とを比較し、輝度の差が小さい遠方領域B、C(路面と推定)での前記移動体の検知感度を高くし、輝度の差が大きい遠方領域B、C(路面だけではない。)での前記移動体の検知感度を低くするようにしたので、移動体検出のための画像処理負荷を効率的に低減しつつ誤検知を低減することができる。
(もっと読む)
1 - 20 / 304
[ Back to top ]