
Fターム[5C054HA31]の内容
閉回路テレビジョンシステム (47,623) | 用途 (7,416) | 自動追尾 (188)
Fターム[5C054HA31]の下位に属するFターム
レーダーとの組合せ (4)
Fターム[5C054HA31]に分類される特許
1 - 20 / 184
撮像装置、撮像装置の制御方法及びプログラム
【課題】被写体が検出された場合の処理の負荷を低減するとともに、ネットワークの通信にかかる負荷を低減できるようにする。
【解決手段】既に検出されている被写体とは異なる新たな被写体が検出された場合に、拡大画像を生成する対象を前記新たな被写体を含む周辺領域に変更する。もしくは、既に検出されている被写体と新たな被写体とを含む周辺領域に変更する。このとき、被写体を切り出し拡大表示している間は、切り出し拡大表示している領域外で被写体の検出は行うが、拡大表示している領域内では被写体の検出を行わないようにしてもよい。
(もっと読む)
画像処理装置およびデジタルカメラ

【課題】背景に動きがある場合でも適切に前景候補を判断し得る画像処理装置を提供すること。
【解決手段】画像処理装置は、nフレーム目の画像と、(n−1)フレーム目の画像において背景を示す画像とをそれぞれ用いて該nフレーム目の画像において背景を示す画像を合成する画像合成手段20と、(n+1)フレーム目の画像と、画像合成手段20により合成された画像とをそれぞれ用いて該(n+1)フレーム目の画像において前景を示す画像を生成する画像生成手段20とを備える。
(もっと読む)
監視装置、監視方法および監視プログラム
【課題】最も拡大画像の撮像対象とする必要のある人物を、より確実に撮像することができる監視装置、監視方法および監視プログラムを提供する。
【解決手段】第1撮像部1により撮像された第1画像に含まれる人物の行動評価値Nを算出し、算出した行動評価値Nに基づいて、第2画像を撮像する第2撮像部2の撮像対象を決定する演算処理部20と、演算処理部20により決定された撮像対象が第2画像に含まれるように第2撮像部2を調整する制御部23と、を備え、演算処理部20は、第2撮像部2による第2画像の撮像と並行して、第1撮像部1により第1画像が新たに撮像されると、新たに撮像された第1画像における行動評価値Nを再び算出して撮像対象を更新し、制御部23は、演算処理部20により撮像対象が更新されると、更新された撮像対象の第2画像が撮像されるように第2撮像部2を調整する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】対象物体の追尾を適切に打ち切る。
【解決手段】消失領域設定部602は、撮像部601により撮像された画像データに対して領域を設定する。物体追尾部603は、画像データ内における対象物体を追尾し、対象物体が前記領域内に入った場合、対象物体の追尾を停止する。
(もっと読む)
車両周辺監視装置
【課題】単眼カメラによる距離検出と単眼カメラ以外の構成による距離検出とを切替えて、車両周囲の対象物の位置を追跡するときに、対象物の距離検出の信頼性が低下することを防止した車両周辺監視装置を提供する。
【解決手段】単眼距離検出部11による検出距離が切替距離以下になった後は、ステレオ距離検出部12により車両1と対象物間の距離を検出して対象物の位置を追跡し、走行状況検知部15により検知されている車両1の走行状況が、単眼距離検出部11による距離検出精度を低下させるおそれがある精度低下懸念状況であるときは、切替距離hを、精度低下懸念状況でないときよりも長く設定する対象物位置追跡部13を備える。
(もっと読む)
監視装置、監視方法およびプログラム
【課題】画面表示された移動体の経路上の指定した場所から映像を再生する。
【解決手段】監視装置10は、移動体の動きを検出する動き検出部22と、検出した動きの特徴に基づいて検出ポイントを設定するとともに、その検出ポイントにおける移動体の位置と録画時刻とを含む経路情報を生成する経路生成部23とを備え、経路情報を参照して、検出ポイント間を結ぶ線を移動体の経路として表示装置130の画面上に表示する。さらに、監視装置10は、前記経路上の位置を指定する入力を受け付けて、指定された位置と検出ポイントとの位置関係に基づいて録画時刻を算出する時刻算出部25を備え、指定した位置に対応する録画時刻から映像を再生する。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
動画提示装置
【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
追尾装置、追尾方法及び追尾プログラム
【課題】少なくとも2つの領域を用いて被検体の追尾を行う場合に、確実に被検体の追尾を行うこと。
【解決手段】被写体を追尾する追尾装置は、被写体が撮像された画像デ―タ中から被写体の顔部を検出し、画像データ中における顔部に対応する色情報の領域を検出し、これら検出された顔部又は色情報の領域に基づいて顔部を追尾し、被検体中の顔部以外の周辺部位を周辺部位追尾部により追尾し、顔部の追尾が出来ない場合、顔部以外の周辺部位の追尾に切り替え、かつ胸部の位置から顔部として推定される位置で、顔部が検出される、又は顔部に対応する色情報が検出されると、顔部の追尾に戻る。
(もっと読む)
追尾装置及び追尾方法
【課題】例えば特殊な画像処理を行う場合等の、追尾性能の劣化が生じ得る場合であっても、適切な追尾処理を行うことができる追尾装置及び追尾方法を提供すること。
【解決手段】撮影して得た画像データである第1の画像データを生成する第1の画像生成モードと、前記第1の画像データを生成すると共に前記第1の画像データに所定の処理を施した第2の画像データを生成する第2の画像生成モードと、のうち何れかの画像生成モードに設定し、画像データについて特徴情報を検出し且つ被写体の顔部位を検出するシステムコントローラ130を追尾装置に具備させる。前記システムコントローラ130は、画像データから検出した特徴情報または顔部位に基づいて、追尾対象の移動位置を演算する。前記システムコントローラ130は、第2の画像生成モードを設定した場合には、第1の画像生成モードを設定した場合に実行する演算とは異なる演算に切り換える。
(もっと読む)
移動物体追跡装置及び参照点追跡方法
【課題】追跡している移動物体上点に対して移動物体の移動方向に所定長さだけ離れた点の方向を精度良く把握可能な移動物体追跡装置を提供する。
【解決手段】移動物体を撮像する撮像器と、撮像器の視野内に移動物体を捉えるように撮像器を駆動するとともに、その指向角度及び移動速度のセンサ信号を出力する駆動機構部と、撮像器で取得した画像データに基づいて移動物体上の追跡点の撮像画像上における座標を算出し、撮像器の視軸方向又は追跡の基準とする方向の撮像画像上における座標を表す追跡原点座標と移動物体の追跡点の座標との差異から追跡誤差を算出する画像処理器と、画像処理器で得られた追跡誤差と駆動機構部からのセンサ信号に基づいて、駆動機構部を駆動する駆動信号を生成するとともに、撮像器の視軸角速度を算出する制御処理器と、制御処理器で得られた視軸角速度に基づいて、移動物体上の追跡点から移動物体の移動方向に所定長さだけ離れた参照点を追跡するための参照点追跡角度を算出する参照点追跡角度算出部とを、具備する。
(もっと読む)
監視装置とそれを用いた監視システム
【課題】本発明は、監視装置とそれを用いた監視システムに関するもので、監視機能の低下を抑制することを目的とする。
【解決手段】撮影部8と、前記撮影部8の駆動部14と、前記撮影部8に接続された映像処理部17と、前記映像処理部17および前記駆動部14に接続された制御部22とを備え、前記映像処理部17は、前記撮影部8から伝送された映像から顔を認識する顔認識部21と、前記顔認識部21による顔認識判定結果により、他の監視装置に応援要請信号を送信する送信部25と、他の監視装置からの応援要請信号を受信する受信部26と、前記顔認識部21による顔認識判定結果により、前記駆動部14の動作モードを、自者優先モードと、他者優先モードから選択する判定部27とを有する構成とした。
(もっと読む)
情報提供装置、システム、方法及びプログラム
【課題】有用な情報提供サービスを実現できる情報提供装置が求められる。
【解決手段】本実施形態によれば、情報提供装置は、映像取得部と、画像認識部と、カメラ追尾制御部と、表示制御部とを備えた構成である。映像取得部は、カメラから目標物体の映像データを取得する。画像認識部は、前記映像データに基づいて指定された目標物体を認識する。カメラ追尾制御部は、前記画像認識結果に基づいて、前記カメラを前記指定の目標物体に追尾させる。表示制御部は、前記指定の目標物体に追尾している前記カメラから取得される映像データを表示装置に出力する。
(もっと読む)
計算装置、計算方法及び計算プログラム
【課題】手間を掛けずに精度高く、カメラの設置高や設置角度を計算可能な計算技術を提供することを目的とする。
【解決手段】計算装置は、各々異なる位置にあるときの同一の対象物が同一のカメラにより各々撮影された複数の画像を対象物毎に取得し、対象物毎に、複数の画像及び対象物の平均の高さを用いて、設置角度及び設置高を計算し、当該設置角度及び設置高に対して投票を行い、投票を行った回数が最も多い設置角度及び設置高を決定する。
(もっと読む)
移動体画像追尾装置
【課題】付加センサを追加せず、追尾性能の劣化を改善する。
【解決手段】実施形態の移動体画像追尾装置は、駆動部、カメラセンサ、追尾誤差検出部、角度センサ、角速度センサ、第1計算部、第2計算部、補正追尾誤差検出部、生成部、および制御部を含む。追尾誤差検出部は、画像データから、移動体の視野中心からのずれ量である追尾誤差を検出する。第1計算部は、追尾誤差と角度とを用いて、移動体の位置ベクトルと速度ベクトルを計算する。第2計算部は、角度からカメラセンサの視軸ベクトルを計算する。補正追尾誤差検出部は、視軸ベクトルと位置ベクトルとの関係および速度ベクトルから、追尾誤差検出値が一定であるサンプリング期間よりも短い期間ごとに補正追尾誤差を計算する。生成部は、補正追尾誤差を使用して移動体を追尾するように駆動部を駆動する角速度指令値を生成する。制御部は、角速度指令値と角速度との差がなくなるように駆動部を制御する。
(もっと読む)
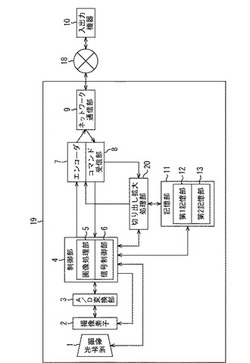
追尾装置
【構成】イメージャ16によって捉えられた被写界を表す探索画像データは、メモリ制御回路30によってSDRAM32の探索画像エリア32cに取り込まれる。CPU26は、顔辞書DC_Fに収められた辞書画像に対する符合度が閾値を上回る顔画像を探索画像エリア32cに格納された探索画像データから探索し、探知された顔画像上の特徴画像を追尾対象として指定し、そして指定された追尾対象を探索画像データを参照して追尾する。追尾時間は、探知された顔画像の辞書画像に対する符合度が大きいほど長くなるように制御される。また、顔画像の探索処理は、追尾処理が起動状態にあるとき停止される。
【効果】追尾性能が向上する。
(もっと読む)
数値制御機器のテレビカメラモニター画面の関連操作方法
【課題】複数のコンピュータシステムのシステムプログラムの変更無しに、簡単に早く操作変更できるようにする。
【解決手段】制御機器の操作方法と、追加したい別の操作方法をテレビモニター画面上で関連付けるようにした。関連付けに使用する、テレビモニター画面は、多くの制御機器で使用され、その機能も簡単で、ほぼ共通の使用方法である。テレビモニター画面上での関連付けの演算は、関連付けの方法として使用し、関連付けの時のみの演算で、演算結果の関連数値を使用する、その関連数値の使用は、そのテレビモニター画面上の操作だけでなく、その関連数値を別の操作機器に関連付けて使用することで、別の制御機器の操作機器で操作出来る。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を時刻毎に生成した複数の予測位置に基づいて追跡する装置において、監視空間内の障害物の領域に設定された予測位置を画一的に排除すると物体位置の判定精度が劣化する。
【解決手段】ペナルティ設定部50は、障害領域に対応して障害物の高さに応じたペナルティ値を設定する。物体位置判定部53は、各予測位置に対応して画像から抽出される移動物体の特徴量に応じた評価値を算出し、当該評価値に基づいて物体位置を判定する。当該判定に際して、物体位置判定部53は各予測位置の評価値を当該位置でのペナルティ値に応じて低める補正を行う。
(もっと読む)
画像認識装置、画像認識方法及びプログラム
【課題】画像中の被写体を精度良く追尾できるようにする。
【解決手段】入力された画像から被写体領域を特定し、前記特定された被写体領域の位置を代表する注目点を算出して前記被写体領域を追尾する画像認識装置であって、前記注目点を含む領域が前記被写体領域と異なる領域である場合には前記注目点の位置を前記被写体領域の内部に補正し、前記補正された位置の注目点に基づいて前記被写体領域を追尾するようにして、例えば、ドーナツ型の形状の被写体を検出する場合も精度良く被写体を追尾できるようにする。
(もっと読む)
全周警戒システム
【課題】高解像度カメラの台数に関係なく全ての対象を追尾可能な全周警戒システムを提供するにある。
【解決手段】走行車100に搭載された全周囲センサ50により全周囲を走査して全周囲センサ画像を取得し、全周囲センサ画像中の全ての対象を追尾し、全周囲センサ画像中の対象から操作者が高解像度カメラにより撮影を意図する1又は2以上の撮影対象a,b,…を選択すると、選択された撮影対象a,b,…の三次元位置に基づいて、走行車100に搭載された複数台の高解像度カメラ11,12,13,…のうち撮影対象a,b,…に対して最も近い距離にあるものを当該撮影対象a,b,…にカメラ割当器30にて割り当てるので、走行車100と撮影対象a,b,…との相対的位置の変化に対応して、高解像度カメラ11,12,13,…を切り替えながら撮影対象a,b,…を高解像度カメラにより撮影し続けることができる。
(もっと読む)
1 - 20 / 184
[ Back to top ]