
Fターム[5C122HB06]の内容
Fターム[5C122HB06]の下位に属するFターム
Fターム[5C122HB06]に分類される特許
21 - 40 / 5,547
ズームレンズおよび撮像装置
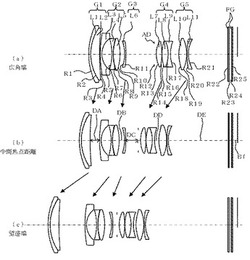
【課題】 小型で且つ高性能のズームレンズであって、AF動作の高速化およびAF動作に要する駆動系の小型化を図ることができ、1000万画素を超える撮像素子に対応した解像力が得られるズームレンズの実現、さらには、このようなズームレンズを用いる撮像装置の実現を目的とする。
【解決手段】 光軸に沿って、物体側から、順次、正の第1レンズ群G1と、負の第2レンズ群G2と、負の第3レンズ群G3と、正の第4レンズ群G4と、正の第5レンズ群G5とを配置する。第3レンズ群G3でフォーカシングする。広角端での焦点距離Fw、望遠端での焦点距離Ftより、中間焦点距離Fm=√(Fw×Ft)として、広角端から中間焦点距離Fmまでの第1レンズ群の移動量をTwm、広角端から望遠端までの第1レンズ群の移動量をTwtとして、
〔1〕 0.1<Twm/Twt<0.4
を満足する。
(もっと読む)
撮像装置及びその制御方法、並びにプログラム

【課題】低輝度限界以下の被写体輝度となる測光領域が存在する場合でも適正な露出となるように制御可能な撮像装置及びその制御方法、並びにプログラムを提供する。
【解決手段】撮像装置1は、輝度限界値に応じた補正を行わない測光値に対する重み付け係数を輝度限界値に応じた補正を行う測光値に対する重み付け係数よりも大きくして、測光されることで得られた複数の測光値の重み付け演算を行い、演算結果に基づいて露出値を決定する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】被写体領域近傍の背景領域のぼけ滲みの発生を抑えた画像データを得る。
【解決手段】背景ぼかし画像生成部111は、撮像装置100により撮像された画像データにおける被写体を含む領域を判定し、上記画像データにおける対象部分と被写体を含む領域との距離に応じてゲイン値を決定する。そして背景ぼかし画像生成部111は、決定したゲイン値を用いて対象部分を補間した上で画像データに対してフィルタリング処理を施し、フィルタリング処理を施した画像データと、被写体を含む領域に該当する画像データとを合成する。
(もっと読む)
撮像装置
【課題】撮像装置において、人体検出をフォーカス制御に利用する。
【解決手段】撮像装置としてのデジタルカメラは、デジタル信号処理回路18及びシステム制御回路20を備える。デジタル信号処理回路18は、時系列上の画像から人体を検出し、人体のサイズ変化を検出する。システム制御回路20は、人体のサイズ変化を用いてレンズ10を近距離側あるいは遠距離側のいずれかに移動させ、その後、コントラスト方式によるオートフォーカスを実行する。
(もっと読む)
画像処理システム、画像処理システムを備えた車両、画像処理方法及びプログラム
【課題】低い消費電力や、安全性の向上を実現できるとともに、異物検出用のフレームの挿入によるセンシング用のフレームレートの低下を抑えることが可能な画像処理システム、画像処理システムを備えた車両、画像処理方法及びプログラムを提供する。
【解決手段】フロントガラス105に向けて光を照射する光源202と、フロントガラス105に付着した雨滴203によって反射された光源202からの光、及び、車両外部からフロントガラス105を透過した光を撮像する撮像装置201と、撮像装置201で撮像された撮像画像データを解析する画像解析ユニット102と、を備え、撮像画像データは、雨滴検出用のフレーム及び車両周辺情報検出用のフレームからなり、画像解析ユニット102は、撮像装置201における雨滴検出用のフレームの読み出し規則を、車両周辺情報検出用のフレームの読み出し規則と異ならせる。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】撮影画像に含まれるノイズの低減処理を行う装置、方法を提供する。
【解決手段】撮像装置の撮影画像の区分領域である局所領域単位の特徴量を算出し、算出した特徴量から構成される画像確率モデルであり、各ノイズ無し画素値の発生確率を示す画像確率モデルを生成する画像確率モデル生成部と、撮像素子対応のノイズ特性情報から生成されるノイズ確率モデルであり、あるノイズ無し画素値が発生した場合に、あるノイズ有り画素値が発生する条件付き確率を示すノイズ確率モデルを格納したメモリと、画像確率モデルと、ノイズ確率モデルを適用したベイズ推定処理により、撮影画像のノイズを低減したノイズ低減画像を生成する。
(もっと読む)
撮像装置、再生装置、その制御方法、撮像システム、及びプログラム
【課題】1つの撮像光学系の異なる射出瞳を通過した光束から生成された両眼立体視用の画像を、観測者に与える不快感を低減して提示する。
【解決手段】左眼用及び右眼用の画像が撮像された際の焦点レンズの駆動位置である合焦駆動位置を示す情報を取得する。そして、焦点レンズが該合焦駆動位置にある場合に撮像された左眼用の画像及び右眼用の画像の少なくともいずれかの画像についてのシフト量を決定し、左眼用及び右眼用の画像と関連付けて記録する。このときシフト量は、撮像装置との距離が所定距離である被写体について、シフト後の該画像間における第1の像ずれ量と、焦点レンズが予め定められた基準駆動位置にある場合に得られる左眼用及び右眼用の画像間における第2の像ずれ量との差分が所定の範囲内に収まるように決定される。
(もっと読む)
情報処理装置、撮像装置、情報処理方法およびプログラム
【課題】撮像動作時における設定内容を適切に決定する。
【解決手段】情報処理装置は、制御部を備える。制御部は、音取得部により取得された周囲の音と、撮像部により生成された画像とに基づいて、その撮像部の撮像動作時における設定内容を決定するための制御を行う。また、情報処理装置は、音取得部により取得された周囲の音に基づいてその音を発する対象物を判定する第1判定部と、撮像部により生成された画像に基づいてその画像に含まれる対象物を判定する第2判定部とをさらに具備するようにしてもよい。この場合に、制御部は、第1判定部による判定結果と、第2判定部による判定結果とに基づいて、その設定内容を決定する。
(もっと読む)
画像処理装置、サーバ、携帯端末装置、及び画像処理方法
【課題】渋滞時においても走行速度の増減により画質を切り替える場合でも、表示させる撮像画像としての品質を向上する。
【解決手段】最終的な画質設定値である明るさ出力値Lが、次信号離間距離Dに応じた明るさ切片値Cが設定される停車状態(V=0)と、参照設定値Lcに固定された走行速度域(V≧Vs)との間に、明るさ出力値Lを車両速度Vに対応して連続的に変化させる連続変化速度領域(0<V<Vs)を設けている。この連続変化速度領域においては、当該連続変化速度領域を挟む2つの固定速度領域(V=0、V≧Vs)のそれぞれに固定的に設定されている明るさ出力値Ls,Lcの間で車両速度Vに対し線形比例するよう明るさ出力値Lを変化させている。また明るさ切片値Cは、車両100が信号機200に近づくに従って変化させている。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】発光源が点灯したときの絶対的な輝度を利用して、発光源の点灯有無を高精度に判断する。
【解決手段】車外環境認識装置は、車外環境の明るさに応じた第1露光態様で第1画像を取得すると共に、発光源が自発光しているか否かを判別可能な、露光時間が第1露光態様と異なる第2露光態様で第2画像を取得し、第1画像に基づき検出領域内で先行する車両が占有する車両領域を特定し、第2画像の輝度に基づいて発光源の位置を特定し、車両領域と発光源の位置とを対応付ける(S316)。
(もっと読む)
顕微鏡装置
【課題】単一の撮像素子を用いて、試料の像を視差のある2つの像として同時に撮像可能な顕微鏡装置を提供する。
【解決手段】対物レンズ8により集光された試料Sからの光を第1の像として結像させる第1の結像光学系9aおよび第2の像として結像させる第2の結像光学系9bと、第1の結像光学系9aおよび第2の結像光学系9bの焦点位置に配置され、第1の像が結像される第1の撮像領域R1と第2の像が結像される第2の撮像領域R2とを有する撮像素子10とを備える顕微鏡装置1を提供する。
(もっと読む)
画像補正装置および画像補正方法
【課題】光学歪み補正の補正率を高める技術を提供する。
【解決手段】画像データ圧縮部9は、ズーム機能を有する光学レンズを介して撮像された画像データを圧縮し、圧縮画像データとしてメモリ10に格納する。歪曲補正部11は、画像データに生じている光学歪みを補正する。画像データ伸張部13は、メモリ10に格納された圧縮画像データを伸張し、歪曲補正部11に補正させる。ここで画像データ圧縮部9は、撮像時の前記光学レンズのズーム値をもとに、メモリ10の容量におさまるように前記撮像された画像データを圧縮する。
(もっと読む)
撮像装置と撮像制御方法およびプログラム
【課題】品位の良好なズーム動作を行うことができるようにする。
【解決手段】撮像光学系21は、ズームレンズ211とフォーカスレンズ212等を用いて構成されている。光学系駆動部22は、撮像光学系21の駆動を行う。制御部43は、動画の記録を行う第1の動作モードの場合、ズームレンズの駆動方向に対してヒステリシスを有するズームレンズ位置のヒステリシスによる影響を回避する回避動作を行わないようにする。制御部43は、第1の撮影モードと異なる第2の動作モードの場合に回避動作を行う。このため、動画記録中にズーム動作を行っても、ヒステリシスによる影響を回避する回避動作による画角変動を防止できる。第2の動作モードでは、回避動作が行われることからヒステリシスによる影響が回避されてズームレンズを所望の位置とすることができる。したがって、品位の良好なズーム動作を行うことができるようになる。
(もっと読む)
画像処理装置、画像処理方法、および記録媒体
【課題】簡単に、多重露光による画像を得ることができるようにする。
【解決手段】画像合成部は、入力画像に含まれる被写体の領域を含む画素の加算を行う合成処理を行い、入力画像の被写体を検出する被写体検出部における検出結果に基づいて、合成処理を終了する。本技術は、例えば、多重露光撮影の画像処理を行う画像処理装置に適用できる。
(もっと読む)
画像処理装置
【課題】撮像素子の感度の温度特性に伴う処理精度の低下を抑える。
【解決手段】赤外線LED26に電源を供給する回路に、抵抗R3と、接地したNTCサーミスタ50と、このNTCサーミスタ50と抵抗R3とに接続した抵抗R4が組み込まれている。NTCサーミスタ50はCMOS基板10fの温度を直接的に又は間接的に検知する。温度が高くなるとNTCサーミスタ50の抵抗が低下する。これにより、抵抗R3と抵抗R4の分圧比が変化して赤外線LED26の発光光量が低下することで温度上昇に伴うCMOSイメージセンサの感度上昇を補償する。
(もっと読む)
撮像光学系及びそれを備える撮像装置
【課題】小型で高性能な撮像光学系及び小型で高性能な撮像光学系を備える撮像装置を提供すること。
【解決手段】本発明の撮像光学系は、物体側から順に、開口絞りSと、正の屈折力を有する第1レンズL1と、負の屈折力を有する第2レンズL2と、正の屈折力を有する第3レンズL3と、正の屈折力を有する第4レンズL4と、負の屈折力を有する第5レンズL5と、の5枚のレンズよりなることを特徴とする。また、撮像装置は、この撮像光学系を備えている。
(もっと読む)
画像処理方法および装置、プログラム
【課題】複数の撮像部によって構成される多眼方式の撮像装置において、一部の撮像部に動作不良が生じても、簡易かつ精度よく当該動作不良の生じた撮像部の撮影領域をカバーする。
【解決手段】複数の撮像部によって構成される、回転機構によって回転可能な撮像部群と、前記撮像部の不良を検知する不良撮像部検知手段と、を備える多眼方式の撮像装置であって、前記不良撮像部検知手段で不良が検知された撮像部の位置に不良が検知されなかった撮像部がくるように前記撮像部群を回転させ、不良が検知された撮像部によって取得されるべき画像を不良が検知されなかった撮像部を用いて撮影する。
(もっと読む)
自動追尾カメラシステム
【課題】 追尾被写体の位置が追尾の所定位置と異なっていても大きな映像変化をさせないで所定の位置に追尾制御することを可能にした自動追尾カメラシステムを提供する。
【解決手段】 自動追尾カメラシステムは、レンズ装置と撮像装置を含む撮影部をパン・チルト回動させる回動手段と、撮影映像から追尾対象を検出する追尾対象検出手段と、追尾対象の移動ベクトルを検出する移動ベクトル検出手段と、撮影映像内での追尾対象の捕捉位置を設定する捕捉位置設定手段と、回動手段の駆動を制御する制御手段を有し、制御手段は、追尾対象検出手段によって撮影映像内に追尾対象を検出した後、移動ベクトル検出手段によって検出された移動ベクトルに基づき、捕捉位置に追尾対象を捕捉するよう回動手段を制御する捕捉モードと、捕捉モードの後、追尾対象を捕捉位置に捕捉し続けるように回動手段を制御する維持モードと、を有する。
(もっと読む)
カメラシステム
【課題】 多数のカメラを設置すること無く、かつ、死角を生じることがない、操作性に優れたカメラシステムを提供する。
【解決手段】 被写体103との距離である被写体距離を検出する被写体距離検出手段を備えたカメラ101と、カメラの撮影方向を変更可能な撮影方向変更手段と、カメラを移動させる移動手段と、移動手段により移動した移動距離を検出する移動距離検出手段と、被写体距離と移動距離により、カメラと被写体との角度を算出し、前記角度を元に撮影方向変更手段によりカメラの撮影方向を変更する制御手段とを有する。
(もっと読む)
撮像装置、撮像システム、撮像装置の制御方法
【課題】動画像として表示装置に被写体像を表示している時に、焦点距離および被写体距離(撮影倍率)に応じて像ブレ補正の動作および停止を適切に制御する。
【解決手段】焦点距離が変更可能な撮像光学系を有する撮像装置であって、撮像装置の振れによる画像ブレを補正する補正部と、撮像装置の角度振れを検出する角度振れ検出部と、撮像した画像を表示する表示部と、角度振れと、撮像光学系の焦点距離と、撮像光学系の焦点距離と被写体距離とから算出される撮影倍率とに基づいて画像ブレの補正量を算出する補正量算出部と、表示部が撮像した画像をスルー画像として表示している場合に、焦点距離と撮影倍率とに応じて画像ブレの抑振率を設定する制御部とを備える。
(もっと読む)
21 - 40 / 5,547
[ Back to top ]