
Fターム[5F031GA43]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 駆動機構 (1,726) | リンク機構 (995)
Fターム[5F031GA43]に分類される特許
121 - 140 / 995
搬送ロボット、円盤状搬送対象物アライメント方法
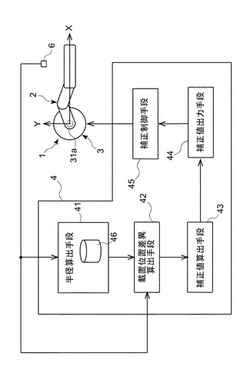
【課題】単一のセンサを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を正確に求め、ウェーハを正確に搬送する。
【解決手段】ハンドに載置したウェーハ7のセンサ6に対する通過距離と、ハンド上における正規の載置位置に載置保持したウェーハ7がセンサ6を通過する距離と、ウェーハの半径とを利用して、ハンドに載置したウェーハ7の位置と正規の載置位置との差異を求める載置位置差異算出手段42と、その差異を旋回軸31a及びアーム2のロボット動作極座標系における補正値に変換して算出する補正値算出手段43と、その補正値を出力する補正値出力手段44とを有する搬送ロボット1とした。
(もっと読む)
搬送手段の高さ移動量設定方法

【課題】支持テーブル上のワークを搬送する際の搬送手段の高さ移動量を自動的に設定すること。
【解決手段】ワークを支持する支持テーブルと、支持テーブル上のワークを吸引保持する吸引パッドを備える搬送手段とを備える研削装置1において、吸引パッドに発生した負圧の値を読み取りながら吸引パッドを降下させ(S1:降下工程)、負圧の値があらかじめ設定したしきい値を超えた際にその吸引パッドの高さ位置を記録し(S5:記録工程)、その吸引パッドの高さ位置に基づいて支持テーブルに支持されたワークを搬送手段が搬出する際の吸引パッドの高さ移動量を設定する(S6:設定工程)ことを特徴とする。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】処理済ウエハを搬送するときにも未処理ウエハより速度を上げて搬送可能とし,これによって従来以上に処理全体のスループットを向上させる。
【解決手段】ローダアーム機構200のピックを基板保持可能範囲を拡大して位置ずれが発生してもウエハを保持できるようにし,トランスファアーム機構300を搬送制御する際,そのピック上に未処理ウエハWがあるか否かを判断し,未処理ウエハなしと判断した場合は,ピック上にウエハなしの場合のみならず,処理済ウエハありの場合についても,ピック上に未処理ウエハありと判断した場合よりも速い速度で搬送制御する。
(もっと読む)
基板処理装置
【課題】スループットの向上が可能な基板処理装置を提供する。
【解決手段】基板処理装置100は、互いに並列に設けられたインデクサブロック10、第1の処理ブロック11および第2の処理ブロック12からなる。インデクサブロック10には、インデクサロボットIRが設けられている。第1の処理ブロック11には、第1のメインロボットMR1が設けられている。第2の処理ブロック12には、第2のメインロボットMR2が設けられている。インデクサブロック10と第1の処理ブロック11との間には、複数の基板Wを同時に反転させるための反転ユニットRT1aが設けられている。
(もっと読む)
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】被処理基板と支持基板の剥離処理を適切且つ効率よく行う。
【解決手段】剥離装置30は、被処理ウェハWを加熱する加熱機構124を備え、且つ当該被処理ウェハWを保持する第1の保持部110と、支持ウェハSを加熱する加熱機構141を備え、且つ当該支持ウェハSを保持する第2の保持部111と、第1の鉛直移動部151と第2の鉛直移動部152とを備えた移動機構150とを有している。第1の鉛直移動部151は、第2の保持部111に保持された支持ウェハSが、その外周部から中心部に向けて第1の保持部110に保持された被処理ウェハWから連続的に剥離するように、第2の保持部111の外周部を保持して鉛直方向に移動させる。
(もっと読む)
基板を処理するクラスタツールアーキテクチャ
【課題】システムスループットを増加させ、処理シーケンスCoOを低減する機器を提供する。
【解決手段】実施形態は、一般的に、スループットを増加させ、信頼性を増加させたマルチチャンバ処理システム(例えばクラスタツール)を使用して基板を処理する機器および方法を提供する。クラスタツール内で処理される基板は繰り返し可能性が高く、システムフットプリントが小さい。クラスタツールの一実施形態では、基板をまとめてグループ化して移送することで、基板を2枚以上のグループ毎に処理してシステムスループットを増加することにより、また、処理チャンバの間で基板のバッチを移送する際の動作数を低減することで、ロボットの疲労を低減し、システムの信頼性を増加させることにより所有権のコストが低減される。実施形態はまた、システムの停止時間を低減し、基板移送処理の信頼性を増加させるために使用される方法および機器を提供する。
(もっと読む)
基板処理装置及び基板処理方法
【課題】基板搬送ロボットの搬送速度を向上させ、処理効率を向上させることが可能な基板処理装置を提供する。
【解決手段】基板処理装置が、基板に熱処理を施す処理室と、第1基板支持部を有し該第1基板支持部で基板を支持して搬送する第1搬送ロボットが設けられ、該第1搬送ロボットが、前記処理室から基板を取り出すことのない搬送ロボットである第1搬送室と、第2基板支持部を有し該第2基板支持部で基板を支持して搬送する第2搬送ロボットが設けられ、該第2搬送ロボットが、前記処理室から基板を取り出す搬送ロボットである第2搬送室とを備えるように構成し、前記第1搬送ロボットに設けられた第1基板支持部の摩擦力を、前記第2搬送ロボットに設けられた第2基板支持部の摩擦力よりも大きくする。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、振動吸収体6の先端部に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
リンク式ロボットアーム装置
【課題】アームの制御性低下を効果的に抑制するとともに、吸着ON・OFF状態の切替応答性が向上するリンク式ロボットアーム装置を提供する。
【解決手段】アームの先端側に配置され且つ吸着用エア供給口C3を有するエンドエフェクタCによって搬送対象物を吸着保持可能なリンク式ロボットアーム装置Xとして、アーム1の内部に設けたエア管4を介して吸着用エア供給口C3に接続され、吸着用エア供給口C3に吸着用エアを供給可能な状態と、吸着用エア供給口C3への吸着用エア供給を停止する状態との間で切替可能な吸着切替ユニット3を備え、この吸着切替ユニット3を、アーム1のうちアーム長1Lの半分1Cよりもシータ軸J3に近い位置に設けた。
(もっと読む)
基板処理システム、及び基板処理装置並びに基板処理装置の表示方法
【課題】データ量の増加を抑えつつ、基板処理装置を構成する各部品の状態変化を検出することが可能な基板処理システム、及び基板処理装置並びに基板処理装置の表示方法を提供すること。
【解決手段】基板を処理する基板処理装置と、基板処理装置に接続される群管理装置と、を備える基板処理システムであって、基板処理装置は、少なくとも基板処理装置を構成する各部品の状態を示すモニタデータを取得し、複数のモニタデータを集約し、モニタデータの最大値、平均値、最小値のうち少なくともいずれかを有するパッケージデータを生成し、パッケージデータを群管理装置に送信するように構成されており、群管理装置は、パッケージデータを基板処理装置から受信して読み出し可能に記憶するように構成されている。
(もっと読む)
支持装置及び支持方法
【課題】凸部が設けられた半導体ウエハ等の板状部材を支持して搬送する際に、当該支持の安定化を図ることができ、凸部に接触する接触面を当該凸部から簡単に切り離すことができるようにすること。
【解決手段】凸部W1が設けられた半導体ウエハWの支持装置12であり、当該装置は、凸部W1の先端に接触可能な接触体26と、半導体ウエハWに吸引力を付与する吸引手段30とを含む。接触体26は、接触面26A側に貫通する吸引口40を備えた自粘性を有する材料によって構成されている。接触体26を無負荷状態で断面視したときに、接触面26Aは、吸引口40に向かって先細となる形状をなす。接触面26Aは、半導体ウエハWを支持したときに、凸部W1の先端面形状に合わせて変形可能に設けられる。
(もっと読む)
基板処理装置
【課題】パーティクルチェック作業を短縮する。
【解決手段】基板に処理を施す複数の処理室と、前記複数の処理室のそれぞれへ前記基板を保持部に保持して搬送する第一搬送装置を備えた第一搬送室と、前記基板を大気圧状態で搬送する第二搬送装置を備えた第二搬送室と、前記第一搬送室と前記第二搬送装置とを連結する減圧可能な予備室と、前記第一搬送室と前記第二搬送装置および前記予備室に対して設けられた排気装置と、前記基板が複数収納された収納容器と前記複数の処理室との間の前記第一搬送装置および前記第二搬送装置の搬送を制御する制御手段と、を有する基板処理装置において、前記制御手段は、システムスタンバイ処理を実行する前に、前記システムスタンバイ処理で実行する項目を設定する処理選択画面を表示部に表示し、選択された前記項目のみをシステムスタンバイ処理として実行する。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】 基板処理装置に於ける基板搬送ロボットの過熱を低減し、基板搬送ロボットの信頼性及び寿命の低下を抑制する。
【解決手段】 負圧下で基板が搬送される搬送室と、搬送室に接続され基板に加熱処理を施す処理室と、搬送室内に設けられ処理室内外へ基板を搬送する搬送ロボットと、搬送室の内壁を冷却する冷却部と、を備える。
(もっと読む)
有機ELデバイス製造装置及び製造方法
【課題】
本発明は、より均一な成膜を実現できる、或いは高精彩なデバイスを製造できる有機ELデバイス製造装置及び製造方法を提供することである。
【解決手段】
本発明は、複数の受けピンを介して基板を水平状態の蒸着ステージで受渡し、前記蒸着ステージを回転させて略直立姿勢または直立姿勢にし、真空チャンバ内で前記基板に蒸着材料を蒸着する有機ELデバイス製造装置または製造方法において、前記複数の受けピンの先端より上方に前記蒸着ステージを移動し、前記基板を前記複数の受けピンから前記蒸着ステージに移載し、その状態で前記回転を行うことを特徴とする。
(もっと読む)
真空処理装置
【課題】真空処理装置において、試料の位置ずれが発生した際にそのずれ量を抑制し、予期しない搬送動作の停止を防ぐ。
【解決手段】試料の搬送を行う真空搬送室において、ロボットによる前記搬送の動作中に生じるアーム上に載せられたウエハの加速度はアームの伸長の開始または収縮の終了の際の加速度が最大であって、搬送中の試料の位置ずれを検出し、そのずれ量が所定の閾値(許容値)を超えた場合に、ロボットのアームの伸長の開始または収縮の終了の際の加速度をA‘からAに低下させてずれ量が閾値を超えないようにする。
(もっと読む)
ロードポート、EFEM
【課題】FOUP内にウェーハを出し入れする際に、設置時における水平バランスの不的確さに起因するFOUP又はウェーハとの不意な干渉を防止することが可能なロードポートを提供する。
【解決手段】マッピング装置Mを、高さ方向に移動可能な昇降部6と、昇降部6に接続され且つ先端部にセンサ部8を設けた進退部7とを用いて構成し、進退部7をFOUPx内にセンサ部8を進入させてウェーハWを検知可能とするマッピング位置(P2)と先端部をFOUPx外に退避させた状態とする退避位置(P1)との間で移動可能とするとともに、進退部7をマッピング位置(P2)よりも先端部をFOUPx内に進入させてウェーハWを載置可能とする載置位置(P3)に移動可能とし、この進退部7及び昇降部6を用いてウェーハWをFOUPx内とウェーハ搬送室B内との間で移送する移送装置Hを構成したロードポート1とした。
(もっと読む)
産業用ロボット
【課題】水平方向におけるハンドおよびアームの位置調整が可能であっても小型化することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向に移動可能に支持する柱状部材7とを備えている。柱状部材7は、支持部材6を保持する柱部18と、柱部18を保持する柱部17とを備えている。柱部17、18は、鉛直方向に対して互いに逆方向へ傾斜している。柱部18は、その傾斜方向への支持部材6の相対移動が可能となるように支持部材6を保持し、柱部17は、その傾斜方向への柱部18の相対移動が可能となるように柱部18を保持している。
(もっと読む)
基板処理システム
【課題】移送モジュールが設けられた複数の工程設備の間に基板を処理するシステムが提供される。
【解決手段】基板処理システムは、複数の工程設備とバッファーステーションとを有する。各々の工程設備は、内部に搬送ロボットが設けられた移送モジュールとこれに連結される処理モジュールとを有する。バッファーステーションは、複数の隣接する移送モジュールの間に位置し、これらの間に基板を移送するために設けられる。前記複数の工程設備は、移送モジュールとバッファーステーションとが配置される方向に沿って設けられる連結ラインを基準として処理モジュールが連結ラインの第1側に位置する第1設備と連結ラインを基準として処理モジュールが前記連結ラインの第2側に位置する第2設備とを有する。第1設備に設けられる移送モジュールは、第2設備に設けられる移送モジュールに比べ連結ラインを基準として第1側に向かってさらに突出するように設けられる。
(もっと読む)
ロボット制御装置
【課題】ロボットが一方の動作から他方の動作にスムースに移行することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボットの連続した動作を切り換えるロボット制御装置30であって、前記動作に対応する複数のコントローラを備え、前記ロボットの状態が、切り換え後の動作における拘束条件から導出された不変集合に属すると、切り換え後の動作に対応する前記コントローラの初期状態を算出し、前記コントローラを動的に切り換えるものである。
(もっと読む)
加工方法
【課題】如何なる外形の被加工物でも保持テーブルに直接吸引保持して加工を施すことができる加工方法を提供する。
【解決手段】保持テーブル70の保持面73に貼着した粘着シート5上に被加工物1を載置し、この被加工物1の外形縁に沿って粘着シート5を切断して、粘着シート5を、保持面73の被加工物対応領域73Aに対応する部分5Aと、外側領域73Bに対応する部分5Bとに分離する。次いで、粘着シート5の被加工物対応領域73Aに対応する部分5Aを除去し、被加工物対応領域73Aに被加工物1を対応させて直接載置する。次いで被加工物1を保持面73に吸引保持して加工を施す。
(もっと読む)
121 - 140 / 995
[ Back to top ]