
Fターム[5F031KA18]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 位置決め (4,282) | 2段階以上で位置決めを行うもの (64)
Fターム[5F031KA18]に分類される特許
1 - 20 / 64
ロードポート装置
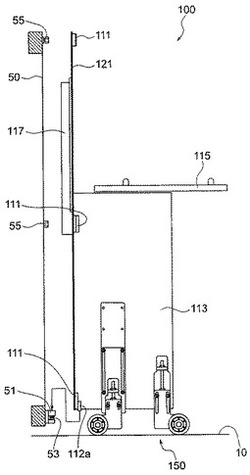
【課題】 半導体処理装置の取付け面に対する取り付けの容易なロードポート装置を提供する。
【解決手段】 ロードポート装置において載置台を支持するベース部材を、該ロードポート装置の取付け面側に配置される前方車輪を有する第一の支持ユニット及び該前方車輪より離れて配置される後方車輪を有する第二の支持ユニットにより支持することとし、ベース部材に対する第一の支持ユニットによる前方車輪の昇降の操作と第二の支持ユニットによる後方車輪の昇降の操作とを独立して行うこととする。
(もっと読む)
ユニット搬出入装置

【課題】複数のウェーハを自動的に搬送して連続的に加工を行うための搬出入装置について、部品点数が少なく、簡易な構成にて実現可能であり、更に、安価な製作コストを実現できる搬出入装置を提供する。
【解決手段】ユニット支持部には、複数の該被加工物ユニットを重ねて収容可能なユニットケースが着脱自在に配設され、搬出入手段のフレーム保持部の直下に、ターンテーブルのユニット通過部と、保持手段が位置付けられた際に、搬出入手段のフレーム保持部を上下動させることで保持手段に対する被加工物ユニットの搬入又は搬出が行われ、搬出入手段のフレーム保持部の直下に、ターンテーブルのユニット支持部が位置付けられた際に、搬出入手段のフレーム保持部を上下動させることでユニット支持部に対する被加工物ユニットの搬出又は搬入が行われる、ユニット搬出入装置とする。
(もっと読む)
サイド用ロードポート、EFEM
【課題】ウェーハ搬送室内に搬送可能なウェーハの数を効果的に増大させることができ、EFEMに用いた場合にはウェーハ搬送の処理能力を向上させることが可能な装置を提供する。
【解決手段】ウェーハ搬送室B及びロードポートCとともにEFEMを構成し、載置テーブルを、ロードポートCがFOUP搬送装置との間でFOUPxを受け渡す位置と同一直線L上に設定したFOUP受渡位置と、ウェーハ搬送室Bの側面にFOUPxを密着させ得る位置に設定したウェーハ出入位置との間で移動させる移動機構を備えたサイド用ロードポート1を案出した。
(もっと読む)
製造工程装置
【課題】ワークピース上に正確かつ迅速にナノメートル構造パターンを形成する。
【解決手段】複合プラットフォームはベースに据えられ、長ストローク移動ステージ12と、圧電被駆動マイクロ・ステージ13とを有する。長ストローク移動ステージは基準セット14と、駆動装置15とを有し圧電被駆動マイクロ・ステージは長ストローク移動ステージに接続され、作業プラットフォームを有する。測定フィードバック組立体20はプラットフォーム組立体10に堅固に据え付けられ、レーザ干渉計と、反射装置と、信号受信装置とを有する。レーザ作業組立体30は、プラットフォーム組立体に据えられ、測定フィードバック組立体に電気的に接続され、レーザ直接書き込みヘッド31と、制御インタフェース装置と、位置決めインタフェース装置33とを有する。
(もっと読む)
ウエハ収納容器
【課題】ウエハ収納容器を誤って横向きに落下させてしまったような場合でも、その内部に収納されている半導体ウエハが破損し難いウエハ収納容器を提供すること。
【解決手段】複数の半導体ウエハ(W)が格納された状態のウエハ収納容器に複数の半導体ウエハ(W)の自重の35倍の荷重が側方から半導体ウエハ(W)の面と平行方向に作用したときに、ウエハ仮置部(10)が半導体ウエハ(W)との当接部(12A)において変位量2.5mm〜10mmの範囲で弾性変形するよう、ウエハ仮置部(10)の弾性変形量を増大させるための弾性変形幇助部(11X,12X)がウエハ仮置部(10)に形成されている。
(もっと読む)
検査方法及び検査装置
【課題】真空ロボットによる試料搬送時の位置ずれを補正するための簡単な機構を備えた検査装置を提供する。
【解決手段】試料ステージのロードポジション(XL,YL)及びアンロードポジション(XU,YU)と、プリアライナの回転角(θL)を保存する。プリアライナ上のウエハを基準方位に対して回転角(θL)だけ回転させるプリアライメントを実行し、更に、プリアライナに対するウエハの偏心量(Δx1,Δy1)を測定する。この偏心量(Δx1,Δy1)に基づいて、試料ステージのロードポジション(XL,YL)を補正する。
(もっと読む)
部品搬送方法、部品搬送装置及び部品実装装置
【課題】ベアチップを取出すためのヘッド等の位置決め精度を高度に保つ。
【解決手段】Y軸方向にのみ移動可能なウエハステージ20に支持されたベアチップを移動カメラ50により画像認識した後、X軸方向にのみ移動可能な突上げヘッド30により突上げ、このベアチップをウエハヘッド42a,42bにより保持して搬送する。この動作の前に、ウエハステージ20に設けられるマークを移動カメラ50により撮像する工程と、移動カメラ50を移動させるときのX軸方向の基準座標をその撮像結果に基づいて定める工程と、突上げヘッド30に設けられるマークを移動カメラ50により撮像する工程と、移動カメラ50を移動させるときのY軸方向の基準座標、及び突上げヘッド30を移動させるときの基準座標をその撮像結果に基づき定める工程と、ウエハステージ20を移動させるときの基準座標を前記両撮像結果に基づいて定める工程とを実行する。
(もっと読む)
移動体装置、露光装置、デバイス製造方法、及びフラットパネルディスプレイの製造方法
【課題】ストッパにより移動が制限された移動体をストッパから離間させる。
【解決手段】 ステージ復帰装置70は、ステージ装置20をストッパ50から離間させる方向に駆動するエアジャッキ72を有している。エアジャッキ72に供給されるエアの制御は、メカニカルバルブ73のスプール78bの操作により行われる。スプール78bは、X粗動ステージ23Xが有するカムフォロア90a、90bに機械的に係合可能なカム89a、89bを有するレバー86を含むバルブ操作機構74により操作される。これにより、例えばX粗動ステージ23Xの位置を検出するための電気的なセンサ類、メカニカルバルブ73を操作するための電動アクチュエータ、上記センサ類、電動アクチュエータなどを制御するための制御系などを必要としない。従って、構成が簡単で低コストである。
(もっと読む)
半導体装置の製造装置及び半導体装置の製造方法
【課題】半導体ウエーハなどの薄い紙状の対象物の正確な位置決めを行う。
【解決手段】半導体装置の製造装置1は、塗布対象物Wの中心をハンド3aの中心に合わせるセンタリング部4aを具備しており、センタリング部4aは、塗布対象物Wを支持する支持台31と、支持台31上の塗布対象物Wを押して移動させ、支持台31に対して位置決めされたハンド3aの中心に塗布対象物Wの中心を合わせる複数の押圧部32とを具備している。
(もっと読む)
半導体装置の製造装置及び半導体装置の製造方法
【課題】塗布対象物に接着剤の塗布膜を所望する膜厚で形成する。
【解決手段】半導体装置の製造装置1は、塗布対象物Wの塗布面に紫外線を照射する照射部5と、照射部5により紫外線が照射された塗布面に接着剤を塗布する塗布部6とを備え、照射部により紫外線が照射された塗布面に接着剤を塗布する。また前記塗布対象物を支持するハンドを有し、前記ハンドにより前記塗布対象物を搬送する搬送部をさらに備え、前記照射部は、前記搬送部により移動する前記塗布対象物の前記塗布面に前記紫外線を照射する。前記照射部は、前記紫外線を発生させるランプと、前記ランプによって発生する前記紫外線の光量を検出する検出器と、前記検出器によって検出された前記紫外線の光量に基づいて前記塗布面に対する照射光量を設定値に維持するように調整する調整手段とを具備する。
(もっと読む)
位置検出装置、露光装置及びデバイスの製造方法
【課題】基板の位置合わせ(ウエハアライメント)を短時間で行うことができる技術を提供する。
【解決手段】ステージ50に保持された基板40に形成されたマークからの光を検出する複数の領域が第1の方向に配列されたセンサ704と、ステージを駆動する第1の駆動部60と、センサに入射するマークAMからの光が第1の方向に沿って移動しながら、複数の領域に順に入射するように、ステージを基板の高さ方向に直交する第2の方向に駆動しつつ、ステージを基板の高さ方向にも駆動するように、第1の駆動部を制御する制御部80と、センサからの信号を処理する処理部90と、を有し、処理部は、信号によって与えられる第1の方向に沿った光強度の分布において、ピークを示す基板の高さ方向の位置を決定することを特徴とする。
(もっと読む)
物体処理装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】基板の対する処理を高精度で行う。
【解決手段】 基板Pの下方には、基板Pの下面にエアを噴出する複数のエア浮上ユニット50が配置され、基板Pは、概ね水平となるように非接触支持される。また、基板Pは、定点ステージ40により被露光部位が下方から非接触保持され、その被露光部位の面位置がピンポイントで調整される。従って、基板Pに高精度で露光を行うことができ、かつ基板ステージ装置PSTの構成を簡単にすることができる。
(もっと読む)
基板位置合わせ機構、それを用いた真空予備室および基板処理システム
【課題】基板の位置合わせを行う容器内における基板位置合わせのためのスペースを極力小さくすることができる基板位置合わせ機構を提供すること。
【解決手段】基板Gを収容する容器81内で基板支持部96,97,98に支持された基板Gの位置合わせを行う基板位置合わせ機構86は、回動して容器81内の基板Gの端面に接触する位置合わせ部材132を有する。
(もっと読む)
露光装置、露光方法およびデバイス製造方法
【課題】基板上のマークの位置をより短い時間で検出し、基板へのパターンの転写のために要する時間を削減する。
【解決手段】原版のパターンを基板の複数のショット領域に順に転写する。各ショット領域は、チップ領域102aとそれを取り囲むスクライブライン領域S1とを含む。露光装置は、走査方向に駆動されている基板における隣接する第1スクライブライン領域S1、第2スクライブライン領域S2を同時に観察し、前記第1スクライブライン領域、前記第2スクライブライン領域にそれぞれ配置されている第1マーク104a、第2マーク104bからの光を検出する検出器と、前記検出器から出力される検出信号を処理して前記第1マーク、前記第2マークの位置を決定する処理部とを備える。前記基板は、前記第1マークおよび前記第2マークの位置に基づいて位置決めされ、露光される。
(もっと読む)
ウェハアライメント装置及びウェハアライメント方法
【課題】短時間で正確にウェハの位置合わせを行う。
【解決手段】ウェハアライメント装置は、1枚目のウェハの位置を基に2枚目以降のウェハを補正する補正処理と、予め定めた2つの低倍率アライメントパターンと基準位置とのズレ量から前記2枚目以降のウェハに対するXYθ方向の補正を行う低倍率補正処理と、予め定めた2つの高倍率アライメントパターンと基準位置とのズレ量から前記2枚目以降のウェハに対するXYθ方向の補正を行う高倍率補正処理とを具備する制御部を備える。ウェハアライメント方法は、ウェハアライメント装置の処理と同様の処理機能によって、複数のウェハを連続的に入れ替えて処理する際に当該ウェハの位置決めを行う。
(もっと読む)
オリエンテーションフラット指定方法、オリエンテーションフラット検出装置及びオリエンテーションフラット指定用プログラム
【課題】同一長さのオリフラが複数混在していても同一長さのオリフラのいずれか一方を基準オリフラとして確実に指定することができるオリエンテーションフラット指定方法を提供する。
【解決手段】本発明のオリエンテーションフラット指定方法は、半導体ウエハWを回転させて3箇所のオリフラ1、2、3をそれぞれ検出し、3箇所のオリフラ1、2、3の間にある3箇所の円弧1、2、3の長さをそれぞれ求めた後、3箇所の円弧1、2、3の長さうち最長の円弧2の右隣にあるオリフラを基準オリフラとして指定するため、同一長さの円弧が複数存在していても基準オリフラを確実に指定する。
(もっと読む)
移動体装置、露光装置、及びデバイス製造方法
【課題】移動体を二次元平面に沿って精度良く案内すること。
【解決手段】 液晶露光装置では、2つの定盤12A,12B上にそれぞれベースパッド72A、72Bが配置され、且つベースパッド72A、72Bにより一枚のステップボード71が支持される。自重キャンセル装置40の装置本体60は、ステップボード71上を移動することによって、定盤12A上から定盤12B上に(又はその反対に)移動するので、分離して配置された隣接する定盤12Aと定盤12Bとの境界部は、自重キャンセル装置40が移動する際のガイド面として機能することがない。従って、2つの定盤12A,12Bを離間させて配置したにも関わらず、基板Pを保持する微動ステージ21をXY平面に沿って精度良く案内することができる。
(もっと読む)
位置合わせ機構、加工装置および位置合わせ方法
【課題】反りを含む半導体ウェーハを破損させることなく、チャックテーブルに精度よく位置合わせすることができる位置合わせ機構、加工装置および位置合わせ方法を提供すること。
【解決手段】半導体ウェーハの外径よりも大径に形成され、半導体ウェーハの少なくとも外周縁部を吸着する吸着面25を有する仮置きテーブル23と、吸着面25に吸着された半導体ウェーハの外周縁部を撮像する撮像機構24と、半導体ウェーハの外周縁部の画像データに基づいて、半導体ウェーハの中心の位置データを算出する制御部と、半導体ウェーハの中心の位置データに基づいて、半導体ウェーハが保持されるチャックテーブル52の保持面56の中心に対し半導体ウェーハの中心を位置合わせした状態で、半導体ウェーハを保持面56に載置するウェーハ供給部17とを備えた。
(もっと読む)
基板搬送装置、基板検査装置、及び、基板搬送方法
【課題】基板搬送装置、基板検査装置及び基板搬送方法において、基板との不要な接触を防ぐ。
【解決手段】ウエハ搬送装置1は、ウエハWが載置されるウエハ載置面2a,3aを有し互いに平行に設置された2本のアーム部2,3と、ウエハ載置面2a,3a(アーム部2,3)をアーム部2,3の長手方向を回動軸A2,A3として水平面に対し傾斜させる傾斜手段としてのバランサ(錘)4,5と、アーム支持部6と、吸引用チューブとしてのアーム側吸引用チューブ7,8と、支持部側吸引用チューブ9と、傾き検出手段としての透過型センサ10,11と、を備える。
(もっと読む)
補正情報作成方法、露光方法及び露光装置、並びにデバイス製造方法
【課題】ステージの位置情報を補正するための高精度な補正データを作成する。
【解決手段】予め作成された第1補正データを用いてエンコーダ及び面位置計測センサの計測結果に含まれる計測面に起因する誤差を補正し、補正された計測結果と対応する干渉計の計測結果との差から、第2補正データを作成する。第2補正データを用いることにより、第1補正データを用いて補正される誤差以外の残留誤差を補正することができる。また、残留誤差を補正する第2補正データを露光動作中のウエハステージの移動経路BEから定められる直線区間L1〜L6に対して作成するので、簡便且つ高精度な補正データの作成が可能となる。
(もっと読む)
1 - 20 / 64
[ Back to top ]