
製造工程装置
【課題】ワークピース上に正確かつ迅速にナノメートル構造パターンを形成する。
【解決手段】複合プラットフォームはベースに据えられ、長ストローク移動ステージ12と、圧電被駆動マイクロ・ステージ13とを有する。長ストローク移動ステージは基準セット14と、駆動装置15とを有し圧電被駆動マイクロ・ステージは長ストローク移動ステージに接続され、作業プラットフォームを有する。測定フィードバック組立体20はプラットフォーム組立体10に堅固に据え付けられ、レーザ干渉計と、反射装置と、信号受信装置とを有する。レーザ作業組立体30は、プラットフォーム組立体に据えられ、測定フィードバック組立体に電気的に接続され、レーザ直接書き込みヘッド31と、制御インタフェース装置と、位置決めインタフェース装置33とを有する。
【解決手段】複合プラットフォームはベースに据えられ、長ストローク移動ステージ12と、圧電被駆動マイクロ・ステージ13とを有する。長ストローク移動ステージは基準セット14と、駆動装置15とを有し圧電被駆動マイクロ・ステージは長ストローク移動ステージに接続され、作業プラットフォームを有する。測定フィードバック組立体20はプラットフォーム組立体10に堅固に据え付けられ、レーザ干渉計と、反射装置と、信号受信装置とを有する。レーザ作業組立体30は、プラットフォーム組立体に据えられ、測定フィードバック組立体に電気的に接続され、レーザ直接書き込みヘッド31と、制御インタフェース装置と、位置決めインタフェース装置33とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワークピースのための製造工程装置に関し、より詳細には、ワークピース上に正確かつ迅速にナノメートル構造パターンを形成するために使用可能である製造工程装置に関する。
【背景技術】
【0002】
一般的に、ワークピース上にナノメートル構造パターン又は複数のナノメートル穴を形成するために用いられる従来のリソグラフィ技術は、フォトリソグラフィ・プロセス、電子ビームリソグラフィ技術、レーザ干渉リソグラフィ技術及びレーザ露光リソグラフィ技術を含む。
【0003】
しかし、前記した従来のリソグラフィ技術の作業スピードは遅く、また、前記従来のリソグラフィ技術のための装置又は装置群は高価である。加えて、プラットフォームの設計、プラットフォームの位置の精度、光学的位置決めシステム及び温度制御は、従来のリソグラフィ技術群の作業精度に影響を及ぼす。
【0004】
さらに、前記従来のレーザ露光リソグラフィ技術の位置特定プラットフォームがワークピースを運ぶために用いられており、これは長ストローク移動ステージと多軸短距離移動プラットフォームとを含む。前記従来の位置特定プラットフォームの長ストローク移動ステージは、駆動源として、ボールねじを有するサーボモータ、リニア・モータ又は音声コイルモータを使用し、また、前記長ストローク移動ステージの位置を検出するために光学定規及び光学的読み取りヘッドを使用する。前記光学定規の長さが1メートルより長いと、作業エラーが増大し、また、これが結果の検出に影響を与える。このため、前記従来の長ストローク移動ステージの精度はナノメートルレベルに到達することができない。前記従来の多軸短距離移動プラットフォームは、通常、圧電性物質製の可撓構造を有する。前記従来の多軸短距離移動プラットフォームの移動は約100ミクロンであり、また、これは、ワークピースに様々なナノメートル構造パターン又はナノメートル穴群を形成することができない。
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような欠点を克服するため、本発明は、前記した問題を低減し又は除去するための製造工程装置を提供する。
【0006】
本発明の主な目的は、製造工程装置を提供すること、より詳細には、ワークピース上に正確かつ迅速にナノメートル構造パターンを形成するために使用可能である製造工程装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明に係る製造工程装置は、プラットフォーム組立体と、測定フィードバック組立体と、レーザ作業組立体とを備える。前記プラットフォーム組立体は、ベースと、複合移動プラットフォームとを有する。前記ベースは据え付けフレームを有する。前記複合移動プラットフォームは前記ベース上に据えられ、また、長ストローク移動ステージと圧電被駆動マイクロ・ステージとを有する。前記長ストローク移動ステージは、基準セットと、駆動装置とを有する。前記圧電被駆動マイクロ・ステージは、前記長ストローク移動ステージに接続され、また作業プラットフォームを有する。前記測定フィードバック組立体は、前記プラットフォーム組立体に堅固に据え付けられ、また、レーザ干渉計と、反射装置と、信号受信装置とを有する。前記レーザ作業組立体は、前記プラットフォーム組立体上に据えられ、前記測定フィードバック組立体に電気的に接続され、また、レーザ直接書き込みヘッドと、制御インタフェース装置と、位置決めインタフェース装置とを有する。
【0008】
本発明の他の目的、利点及び新規な特徴は、添付図面を併用して理解する以下の詳細な説明からさらに明らかとなろう。
【図面の簡単な説明】
【0009】
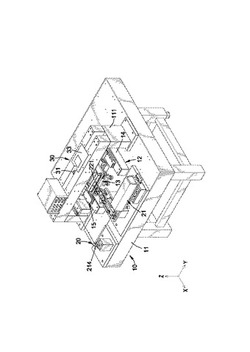
【図1】本発明に係る製造工程装置の斜視図である。
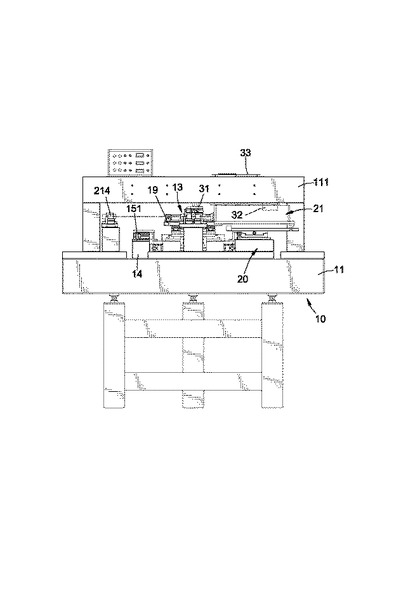
【図2】図1に示す製造工程装置の側面図である。
【図3】図1に示す製造工程装置のプラットフォーム組立体の複合移動プラットフォームの拡大斜視図である。
【図4】作業プラットフォームを除いて示す、図1の製造工程装置の複合移動プラットフォームの拡大斜視図である。
【図5】図1に示す製造工程装置の測定フィードバック組立体の拡大斜視図である。
【図6】図1に示す製造工程装置のレーザ作業組立体の直接書き込みヘッドの拡大斜視図である。
【発明を実施するための形態】
【0010】
図1ないし図4を参照すると、本発明に係る製造工程装置は、プラットフォーム組立体10と、測定フィードバック組立体20と、レーザ作業組立体30とを含む。
【0011】
プラットフォーム組立体10は、ベース11と、複合移動プラットフォームとを有する。ベース11は、頂部と、据え付けフレーム111とを有する。据え付けフレーム111は逆U字形状をなし、また、ベース11の頂部の中間に据えられ、また、頂部と底部とを有する。
【0012】
前記複合移動プラットフォームは、据え付けフレーム111下においてベース11の頂部上に形成され、また、長ストローク移動ステージ12と、圧電被駆動マイクロ・ステージ13とを有する。
【0013】
長ストローク移動ステージ12は据え付けフレーム111下においてベース11の頂面上に据えられ、また、基準セット14と、駆動装置15とを有する。基準セット14はH形を呈し、ベース11の頂面上に堅固に据え付けられ、また、花崗岩で形成されている。花崗岩の熱膨張係数は低く、また、研削精度は2マイクロメートル/メートルに達し得る。駆動装置15は、基準セット14上に据えられ、また、多数のリニア・モータ151を有する。各リニア・モータ151は基準セット14上に据えられ、また、上方側部と、下方側部と、多数のステータ152と、アクティブセル153と、接続ボード154とを有する。ステータ152は、磁気先導レールを形成するために間隔をおいてリニア・モータの側部に堅固に据え付けられている。前記磁気先導レールの直線精度は、0.4マイクロメートル/200ミリメートルに達し得る。アクティブセル153は、リニア・モータ151の側部に据えられたステータ152間においてリニア・モータ151の前記磁気先導レールに移動可能に据えられ、また、リニア・モータ151から伸びる外端部を有する。接続ボード154は、アクティブセル153の前記外端部に接続され、また、アクティブセル153と相対する接続側部を有する。
【0014】
圧電被駆動マイクロ・ステージ13は、前記長ストローク移動ステージに接続され、また、負荷フレーム16と、微調整可能装置17と、多数の交差ローラ軸受装置18と、作業プラットフォーム19とを有する。
【0015】
負荷フレーム16は、図3及び図4に示すように、駆動装置15の接続ボード154に接続され、また、長ストローク移動ステージ12によりX方向又はY方向へベース11に関して移動されることが可能であり、また、頂部を有する。微調整可能装置17は、負荷フレーム16の頂部上に据えられ、また、可撓性台座171と、多数の圧電アクチュエータ172とを有する。可撓性台座171は負荷フレーム16の頂部上に据えられ、また、周縁を有する。圧電アクチュエータ172は負荷フレーム16の頂部上に堅固に据え付けられ、また、可撓性台座171の周縁に隣接している。図4を参照すると、可撓性台座171の位置は調整されることが可能であり、あるいは、可撓性台座171は圧電アクチュエータ172の押圧力によりわずかに変形されることが可能である。
【0016】
交差ローラ軸受装置18は微調整可能装置17のそばで負荷フレーム16の頂部に堅固に据え付けられ、また、各交差ローラ軸受装置18はX方向及びY方向に移動されることが可能であり、また、頂端部を有する。作業プラットフォーム19は、負荷フレーム16の上方において、可撓性台座171上と交差ローラ軸受装置18の頂端部上とに堅固に据え付けられ、また、頂面を有する。
【0017】
図1及び図5を参照すると、測定フィードバック組立体20はプラットフォーム組立体10上に堅固に据え付けられ、また、レーザ干渉計21と、反射装置22と、信号受信装置23とを有する。
【0018】
レーザ干渉計21は、ベース11の頂部上に据えられ、また、レーザ・ビーム211と、第1のビーム・スプリッタ212と、第2のビーム・スプリッタ213と、90度反射ミラー214と、第1の干渉ミラー215と、第2の干渉ミラー216と、第3の干渉ミラー217とを有する。レーザ・ビーム211は、レーザ干渉計21から放射される。ビーム・スプリッタ212,213は、間隔をおいて、ベース11の頂部上に堅固に据え付けられかつレーザ・ビーム211の放射路上に据えられている。好ましくは、第1のビーム・スプリッタ212は33%−67%スペクトル比ビーム・スプリッタからなり、また、第2のビーム・スプリッタ213は50%−50%スペクトル比ビーム・スプリッタからなる。
【0019】
90度反射ミラー214は、ベース11の頂部上に堅固に据え付けられ、ビーム・スプリッタ212,213と整列しており、また、レーザ・ビーム211の放射方向を90度変えるために使用される。干渉ミラー215,216,217は、ベースの頂部上に据えられており、ビーム・スプリッタ212,213により分割されまた90度反射ミラー214により反射されたレーザ・ビーム211を受け取るために使用される。好ましくは、第1の干渉ミラー215は第1のビーム・スプリッタ212により分割されたレーザ・ビーム211を受け取るために使用され、第2の干渉ミラー216は第2のビーム・スプリッタ213により分割されたレーザ・ビーム211を受け取るために使用され、また、第3の干渉ミラー217は90度反射ミラー214により反射されたレーザ・ビーム211を受け取るために使用される。
【0020】
反射装置22は作業プラットフォーム19上に据えられ、また、第1の反射ミラー221と、第2の反射ミラー222とを有する。反射ミラー221,222は作業プラットフォーム19の頂面上に直角に堅固に据え付けられ、かつ、干渉ミラー215,216,217を通過するレーザ・ビーム211を反射させるために用いられる。好ましくは、第1の反射ミラー221は第1の干渉ミラー215及び第2の干渉ミラー216を通過するレーザ・ビーム211を反射させるために用いられ、また、第2の反射ミラー222は第3の干渉ミラー217を通過するレーザ・ビーム211を反射させるために用いられる。
【0021】
信号受信装置23はベース11の頂部上に堅固に据え付けられ、また第1の受信機231と、第2の受信機232と、第3の受信機233とを有する。これらの受信機231,232,233は、反射装置22の反射ミラー221,222により反射されたレーザ・ビーム211を受け取るために使用される。好ましくは、第1の受信機231は、作業プラットフォーム19のX軸移動を検出するために第1の干渉ミラー215からの第1の反射ミラー221により反射されたレーザ・ビーム211を受け取るために使用され、第2の受信機232は、作業プラットフォーム19のX軸移動を検出するために第2の干渉ミラー216からの第1の反射ミラー221により反射されたレーザ・ビーム211を受け取るために使用され、また、第3の受信機233は、作業プラットフォーム19のY軸移動を検出するために第3の干渉ミラー217からの第2の反射ミラー222により反射されたレーザ・ビーム211を受け取るために使用される。さらに、第1の受信機231及び第2の受信機232により検出された前記X軸移動は、作業プラットフォーム19の回転角度の誤差(θz)を計算するために使用されるようにすることができる。
【0022】
図1及び図2を参照すると、レーザ作業組立体30がプラットフォーム組立体10上に据えられ、測定フィードバック組立体20に電気的に接続され、また、レーザ直接書き込みヘッド31と、制御インタフェース装置32と、位置決めインタフェース装置33とを有する。レーザ直接書き込みヘッド31は、作業プラットフォーム19の上方においてベース11の据え付けフレーム111に堅固に据え付けられている。レーザ直接書き込みヘッド31によりワークピースにナノメートル構造パターンを形成するために、作業プラットフォーム19上にワークピースを据えることができる。制御インタフェース装置32は、据え付けフレーム111の底面に堅固に据え付けられ、レーザ直接書き込みヘッド31に電気的に接続され、また、レーザ直接書き込みヘッド31の動作力及び自動焦点制御を管理するためのソフトウエアを有する。位置決めインタフェース装置33は、制御インタフェース装置32の上方において据え付けフレーム111の頂部に据え付けられ、測定フィードバック組立体20とレーザ直接書き込みヘッド31とに電気的に接続され、また、測定フィードバック組立体20により検出されるプラットフォーム組立体10の移動信号を受信するために使用される。好ましくは、位置決めインタフェース装置33は、レーザ直接書き込みヘッド31の所望位置と測定フィードバック組立体20により検出された運動信号とを比較するためにデジタル集積回路チップを有する。
【0023】
本発明に係る前記製造工程装置がワークピースにナノメートル構造パターン又はナノメートル穴群を形成するために使用されるとき、前記ワークピースは作業プラットフォーム19の頂面上に置かれる。次に、図3及び図4を参照すると、プラットフォーム組立体10の複合移動プラットフォームが2つのステップで移動される。第1のステップは、駆動装置15のリニア・モータ151により長ストローク移動ステージ12を長距離移動させることである。本発明において、長ストローク移動ステージ12の移動範囲は、200ミリメートル×200ミリメートル(X,Y)である。加えて、リニア・モータ151の前記磁気先導レールは、アクティブセル153とステータ152との間の磁力によりステータ152とアクティブセル153との間の摩擦抵抗を低減することができ、また、これは、長ストローク移動ステージ12の移動速度と感度とを改善し、さらに、長ストローク移動ステージ12の有用寿命を増大させることができる。
【0024】
前記第1のステップの後、前記複合移動プラットフォームの第2のステップは、可撓性台座171を押して又は引いてX軸方向に移動させるか、又は、圧電アクチュエータ172によりZ軸方向の周りに回転させることである。さらに、交差ローラ軸受装置18は、可撓性台座171と共に、Z軸方向の周りに上方向又は下方向に回転し、また、X方向及びY方向に移動するように、駆動されることが可能である。次に、圧電被駆動マイクロ・ステージ13の微調整可能装置17と多数の交差ローラ軸受装置18とが、作業プラットフォーム19がX軸に沿って微小距離を正確に移動しまたZ軸に沿って微小角度を正確に回転することを可能にする。
【0025】
圧電被駆動マイクロ・ステージ13の微調整可能装置17及び交差ローラ軸受装置18によるプラットフォーム組立体10の作業プラットフォーム19の位置調整後、図5を参照すると、レーザ・ビーム211がレーザ干渉計21から放射される。レーザ・ビーム211が第1のビーム・スプリッタ212に放射されると、レーザ・ビーム211の強度が33%スペクトル比レーザ・ビーム(L1)と、67%スペクトル比レーザ・ビームとに分割される。前記33%スペクトル比レーザ・ビーム(L1)は第1の干渉ミラー215と第1の反射ミラー221とに直接に放射され、第1の反射ミラー221により第1の干渉ミラー215に跳ね返され、また、作業プラットフォーム19のX軸移動を得るために第1の受信機231により受け取られる。前記67%スペクトル比レーザ・ビームは第2のビーム・スプリッタ213に放射され、前記67%スペクトル比レーザ・ビームは50%スペクトル比レーザ・ビーム(L2)と50%スペクトル比レーザ・ビーム(L3)とに分割される。前記50%スペクトル比レーザ・ビーム(L2)は、90度反射ミラー214及び第3の干渉ミラー217に放射されまたこれらにより反射され、第2の反射ミラー222により第3の干渉ミラー217に跳ね返され、また作業プラットフォーム19のY軸移動を得るために第3の受信機233により受け取られる。前記50%スペクトル比レーザ・ビーム(L3)は、第2の干渉ミラー216と第1の反射ミラー221とに放射され、第1の反射ミラー221により第2の干渉ミラー216に跳ね返され、また、作業プラットフォーム19のX軸移動を得るために第2の受信機232により受け取られる。第1の受信機231及び第2の受信機232により受け取られる作業プラットフォーム19の前記X軸移動は、作業プラットフォーム19の回転角度の誤差(θz)を計算するために使用されるようにすることができる。レーザ干渉計21のレーザ・ビーム211は長距離において微細なビームに保つことができかつ消失せず、また、これが高い輝度、安定性及び精密さを有する波長を提供することができ、また、干渉現象がレーザ干渉計21により容易に観察されることが可能である。このことから、測定フィードバック組立体20は、作業プラットフォーム19のX軸移動、Y軸移動及び回転角度の誤差(θz)を正確に検出することができる。
【0026】
作業プラットフォーム19の位置が測定フィードバック組立体20により確認されると、位置決めインタフェース装置33の前記デジタル集積回路が、レーザ直接書き込みヘッド31の所望位置と、測定フィードバック組立体20により検出された作業プラットフォーム19の実際の位置とを比較するために使用されるようにすることができる。次いで、レーザ直接書き込みヘッド31が前記ワークピースに広い範囲のナノメートルパターン又はナノメートル穴群を迅速かつ正確に形成することができる。
【0027】
本発明に係る前記製造工程装置は、プラットフォーム組立体10の2つのステップの操作を用いて、作業プラットフォーム19のための長ストローク及びナノメートル距離効果を実現する。第1のステップでは、H形状の長ストローク移動ステージ12により作業プラットフォーム19が200ミリメートル×200ミリメートル(X,Y)で移動することが可能であり、また、レーザ作業組立体30が作業プラットフォーム19上の前記ワークピースに広範囲のナノメートル構造パターン又はナノメートル穴群を形成することが可能である。第2のステップでは、圧電被駆動マイクロ・ステージ13により、作業プラットフォーム19が微小距離を移動して作業プラットフォーム19の実際の位置を修正し、プラットフォーム組立体10の位置決めの正確性がナノレベルを達成し、また、本発明に係る前記製造工程装置が前記ワークピースにナノメートル構造パターン又はナノメートル穴群を形成することが可能である。
【0028】
さらに、測定フィードバック組立体20のレーザ・ビーム211は長距離において微細なビームに保つことができかつ消失せず、また、これが高い輝度、安定性及び精密さを有する波長を提供することができ、また、干渉現象がレーザ干渉計21により容易に観察されることが可能である。このことから、測定フィードバック組立体20は、作業プラットフォーム19のX軸移動、Y軸移動及び回転角度の誤差(θz)を正確に検出することができる。加えて、レーザ作業組立体30の位置決めインタフェース装置33は、レーザ直接書き込みヘッド31の所望位置と、測定フィードバック組立体20により検出された作業プラットフォーム19の実際の位置とを比較するために使用されるようにすることができる。
【0029】
したがって、本発明に係る前記製造工程装置は、前記ワークピースに広範囲のナノメートル構造パターン又はナノメートル穴群を迅速かつ正確に形成することができ、これが、前記ワークピースへのナノメートル構造パターンの形成コストを低減させ、競争力を引き上げることを可能にする。加えて、本発明に係る製造工程装置のプラットフォーム組立体10と、測定フィードバック組立体20と、レーザ作業組立体30とは、モジュール式で組み立てられ、前記製造工程装置を維持するための時間を低減することが可能である。
【0030】
本発明の多くの特徴及び利点が、本発明の構造及び特徴の詳細と共に前述の説明において述べられたが、その開示は説明だけのためにあり、変形、特に、部分の形状、サイズ及び配列の事項においては添付の特許請求の範囲が表されている用語の広い一般的な意味によって示される限り本発明の原理内において、詳細になされる。
【符号の説明】
【0031】
10 プラットフォーム組立体
11 ベース
12 長ストローク移動ステージ
13 圧電被駆動マイクロ・ステージ
14 基準セット
15 駆動装置
16 負荷フレーム
17 微調整可能装置
18 交差ローラ軸受装置
19 作業プラットフォーム
20 測定フィードバック組立体
21 レーザ干渉計
22 反射装置
23 信号受信装置
30 レーザ作業組立体
31 レーザ直接書き込みヘッド
32 制御インタフェース装置
33 位置決めインタフェース装置
【技術分野】
【0001】
本発明は、ワークピースのための製造工程装置に関し、より詳細には、ワークピース上に正確かつ迅速にナノメートル構造パターンを形成するために使用可能である製造工程装置に関する。
【背景技術】
【0002】
一般的に、ワークピース上にナノメートル構造パターン又は複数のナノメートル穴を形成するために用いられる従来のリソグラフィ技術は、フォトリソグラフィ・プロセス、電子ビームリソグラフィ技術、レーザ干渉リソグラフィ技術及びレーザ露光リソグラフィ技術を含む。
【0003】
しかし、前記した従来のリソグラフィ技術の作業スピードは遅く、また、前記従来のリソグラフィ技術のための装置又は装置群は高価である。加えて、プラットフォームの設計、プラットフォームの位置の精度、光学的位置決めシステム及び温度制御は、従来のリソグラフィ技術群の作業精度に影響を及ぼす。
【0004】
さらに、前記従来のレーザ露光リソグラフィ技術の位置特定プラットフォームがワークピースを運ぶために用いられており、これは長ストローク移動ステージと多軸短距離移動プラットフォームとを含む。前記従来の位置特定プラットフォームの長ストローク移動ステージは、駆動源として、ボールねじを有するサーボモータ、リニア・モータ又は音声コイルモータを使用し、また、前記長ストローク移動ステージの位置を検出するために光学定規及び光学的読み取りヘッドを使用する。前記光学定規の長さが1メートルより長いと、作業エラーが増大し、また、これが結果の検出に影響を与える。このため、前記従来の長ストローク移動ステージの精度はナノメートルレベルに到達することができない。前記従来の多軸短距離移動プラットフォームは、通常、圧電性物質製の可撓構造を有する。前記従来の多軸短距離移動プラットフォームの移動は約100ミクロンであり、また、これは、ワークピースに様々なナノメートル構造パターン又はナノメートル穴群を形成することができない。
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような欠点を克服するため、本発明は、前記した問題を低減し又は除去するための製造工程装置を提供する。
【0006】
本発明の主な目的は、製造工程装置を提供すること、より詳細には、ワークピース上に正確かつ迅速にナノメートル構造パターンを形成するために使用可能である製造工程装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明に係る製造工程装置は、プラットフォーム組立体と、測定フィードバック組立体と、レーザ作業組立体とを備える。前記プラットフォーム組立体は、ベースと、複合移動プラットフォームとを有する。前記ベースは据え付けフレームを有する。前記複合移動プラットフォームは前記ベース上に据えられ、また、長ストローク移動ステージと圧電被駆動マイクロ・ステージとを有する。前記長ストローク移動ステージは、基準セットと、駆動装置とを有する。前記圧電被駆動マイクロ・ステージは、前記長ストローク移動ステージに接続され、また作業プラットフォームを有する。前記測定フィードバック組立体は、前記プラットフォーム組立体に堅固に据え付けられ、また、レーザ干渉計と、反射装置と、信号受信装置とを有する。前記レーザ作業組立体は、前記プラットフォーム組立体上に据えられ、前記測定フィードバック組立体に電気的に接続され、また、レーザ直接書き込みヘッドと、制御インタフェース装置と、位置決めインタフェース装置とを有する。
【0008】
本発明の他の目的、利点及び新規な特徴は、添付図面を併用して理解する以下の詳細な説明からさらに明らかとなろう。
【図面の簡単な説明】
【0009】
【図1】本発明に係る製造工程装置の斜視図である。
【図2】図1に示す製造工程装置の側面図である。
【図3】図1に示す製造工程装置のプラットフォーム組立体の複合移動プラットフォームの拡大斜視図である。
【図4】作業プラットフォームを除いて示す、図1の製造工程装置の複合移動プラットフォームの拡大斜視図である。
【図5】図1に示す製造工程装置の測定フィードバック組立体の拡大斜視図である。
【図6】図1に示す製造工程装置のレーザ作業組立体の直接書き込みヘッドの拡大斜視図である。
【発明を実施するための形態】
【0010】
図1ないし図4を参照すると、本発明に係る製造工程装置は、プラットフォーム組立体10と、測定フィードバック組立体20と、レーザ作業組立体30とを含む。
【0011】
プラットフォーム組立体10は、ベース11と、複合移動プラットフォームとを有する。ベース11は、頂部と、据え付けフレーム111とを有する。据え付けフレーム111は逆U字形状をなし、また、ベース11の頂部の中間に据えられ、また、頂部と底部とを有する。
【0012】
前記複合移動プラットフォームは、据え付けフレーム111下においてベース11の頂部上に形成され、また、長ストローク移動ステージ12と、圧電被駆動マイクロ・ステージ13とを有する。
【0013】
長ストローク移動ステージ12は据え付けフレーム111下においてベース11の頂面上に据えられ、また、基準セット14と、駆動装置15とを有する。基準セット14はH形を呈し、ベース11の頂面上に堅固に据え付けられ、また、花崗岩で形成されている。花崗岩の熱膨張係数は低く、また、研削精度は2マイクロメートル/メートルに達し得る。駆動装置15は、基準セット14上に据えられ、また、多数のリニア・モータ151を有する。各リニア・モータ151は基準セット14上に据えられ、また、上方側部と、下方側部と、多数のステータ152と、アクティブセル153と、接続ボード154とを有する。ステータ152は、磁気先導レールを形成するために間隔をおいてリニア・モータの側部に堅固に据え付けられている。前記磁気先導レールの直線精度は、0.4マイクロメートル/200ミリメートルに達し得る。アクティブセル153は、リニア・モータ151の側部に据えられたステータ152間においてリニア・モータ151の前記磁気先導レールに移動可能に据えられ、また、リニア・モータ151から伸びる外端部を有する。接続ボード154は、アクティブセル153の前記外端部に接続され、また、アクティブセル153と相対する接続側部を有する。
【0014】
圧電被駆動マイクロ・ステージ13は、前記長ストローク移動ステージに接続され、また、負荷フレーム16と、微調整可能装置17と、多数の交差ローラ軸受装置18と、作業プラットフォーム19とを有する。
【0015】
負荷フレーム16は、図3及び図4に示すように、駆動装置15の接続ボード154に接続され、また、長ストローク移動ステージ12によりX方向又はY方向へベース11に関して移動されることが可能であり、また、頂部を有する。微調整可能装置17は、負荷フレーム16の頂部上に据えられ、また、可撓性台座171と、多数の圧電アクチュエータ172とを有する。可撓性台座171は負荷フレーム16の頂部上に据えられ、また、周縁を有する。圧電アクチュエータ172は負荷フレーム16の頂部上に堅固に据え付けられ、また、可撓性台座171の周縁に隣接している。図4を参照すると、可撓性台座171の位置は調整されることが可能であり、あるいは、可撓性台座171は圧電アクチュエータ172の押圧力によりわずかに変形されることが可能である。
【0016】
交差ローラ軸受装置18は微調整可能装置17のそばで負荷フレーム16の頂部に堅固に据え付けられ、また、各交差ローラ軸受装置18はX方向及びY方向に移動されることが可能であり、また、頂端部を有する。作業プラットフォーム19は、負荷フレーム16の上方において、可撓性台座171上と交差ローラ軸受装置18の頂端部上とに堅固に据え付けられ、また、頂面を有する。
【0017】
図1及び図5を参照すると、測定フィードバック組立体20はプラットフォーム組立体10上に堅固に据え付けられ、また、レーザ干渉計21と、反射装置22と、信号受信装置23とを有する。
【0018】
レーザ干渉計21は、ベース11の頂部上に据えられ、また、レーザ・ビーム211と、第1のビーム・スプリッタ212と、第2のビーム・スプリッタ213と、90度反射ミラー214と、第1の干渉ミラー215と、第2の干渉ミラー216と、第3の干渉ミラー217とを有する。レーザ・ビーム211は、レーザ干渉計21から放射される。ビーム・スプリッタ212,213は、間隔をおいて、ベース11の頂部上に堅固に据え付けられかつレーザ・ビーム211の放射路上に据えられている。好ましくは、第1のビーム・スプリッタ212は33%−67%スペクトル比ビーム・スプリッタからなり、また、第2のビーム・スプリッタ213は50%−50%スペクトル比ビーム・スプリッタからなる。
【0019】
90度反射ミラー214は、ベース11の頂部上に堅固に据え付けられ、ビーム・スプリッタ212,213と整列しており、また、レーザ・ビーム211の放射方向を90度変えるために使用される。干渉ミラー215,216,217は、ベースの頂部上に据えられており、ビーム・スプリッタ212,213により分割されまた90度反射ミラー214により反射されたレーザ・ビーム211を受け取るために使用される。好ましくは、第1の干渉ミラー215は第1のビーム・スプリッタ212により分割されたレーザ・ビーム211を受け取るために使用され、第2の干渉ミラー216は第2のビーム・スプリッタ213により分割されたレーザ・ビーム211を受け取るために使用され、また、第3の干渉ミラー217は90度反射ミラー214により反射されたレーザ・ビーム211を受け取るために使用される。
【0020】
反射装置22は作業プラットフォーム19上に据えられ、また、第1の反射ミラー221と、第2の反射ミラー222とを有する。反射ミラー221,222は作業プラットフォーム19の頂面上に直角に堅固に据え付けられ、かつ、干渉ミラー215,216,217を通過するレーザ・ビーム211を反射させるために用いられる。好ましくは、第1の反射ミラー221は第1の干渉ミラー215及び第2の干渉ミラー216を通過するレーザ・ビーム211を反射させるために用いられ、また、第2の反射ミラー222は第3の干渉ミラー217を通過するレーザ・ビーム211を反射させるために用いられる。
【0021】
信号受信装置23はベース11の頂部上に堅固に据え付けられ、また第1の受信機231と、第2の受信機232と、第3の受信機233とを有する。これらの受信機231,232,233は、反射装置22の反射ミラー221,222により反射されたレーザ・ビーム211を受け取るために使用される。好ましくは、第1の受信機231は、作業プラットフォーム19のX軸移動を検出するために第1の干渉ミラー215からの第1の反射ミラー221により反射されたレーザ・ビーム211を受け取るために使用され、第2の受信機232は、作業プラットフォーム19のX軸移動を検出するために第2の干渉ミラー216からの第1の反射ミラー221により反射されたレーザ・ビーム211を受け取るために使用され、また、第3の受信機233は、作業プラットフォーム19のY軸移動を検出するために第3の干渉ミラー217からの第2の反射ミラー222により反射されたレーザ・ビーム211を受け取るために使用される。さらに、第1の受信機231及び第2の受信機232により検出された前記X軸移動は、作業プラットフォーム19の回転角度の誤差(θz)を計算するために使用されるようにすることができる。
【0022】
図1及び図2を参照すると、レーザ作業組立体30がプラットフォーム組立体10上に据えられ、測定フィードバック組立体20に電気的に接続され、また、レーザ直接書き込みヘッド31と、制御インタフェース装置32と、位置決めインタフェース装置33とを有する。レーザ直接書き込みヘッド31は、作業プラットフォーム19の上方においてベース11の据え付けフレーム111に堅固に据え付けられている。レーザ直接書き込みヘッド31によりワークピースにナノメートル構造パターンを形成するために、作業プラットフォーム19上にワークピースを据えることができる。制御インタフェース装置32は、据え付けフレーム111の底面に堅固に据え付けられ、レーザ直接書き込みヘッド31に電気的に接続され、また、レーザ直接書き込みヘッド31の動作力及び自動焦点制御を管理するためのソフトウエアを有する。位置決めインタフェース装置33は、制御インタフェース装置32の上方において据え付けフレーム111の頂部に据え付けられ、測定フィードバック組立体20とレーザ直接書き込みヘッド31とに電気的に接続され、また、測定フィードバック組立体20により検出されるプラットフォーム組立体10の移動信号を受信するために使用される。好ましくは、位置決めインタフェース装置33は、レーザ直接書き込みヘッド31の所望位置と測定フィードバック組立体20により検出された運動信号とを比較するためにデジタル集積回路チップを有する。
【0023】
本発明に係る前記製造工程装置がワークピースにナノメートル構造パターン又はナノメートル穴群を形成するために使用されるとき、前記ワークピースは作業プラットフォーム19の頂面上に置かれる。次に、図3及び図4を参照すると、プラットフォーム組立体10の複合移動プラットフォームが2つのステップで移動される。第1のステップは、駆動装置15のリニア・モータ151により長ストローク移動ステージ12を長距離移動させることである。本発明において、長ストローク移動ステージ12の移動範囲は、200ミリメートル×200ミリメートル(X,Y)である。加えて、リニア・モータ151の前記磁気先導レールは、アクティブセル153とステータ152との間の磁力によりステータ152とアクティブセル153との間の摩擦抵抗を低減することができ、また、これは、長ストローク移動ステージ12の移動速度と感度とを改善し、さらに、長ストローク移動ステージ12の有用寿命を増大させることができる。
【0024】
前記第1のステップの後、前記複合移動プラットフォームの第2のステップは、可撓性台座171を押して又は引いてX軸方向に移動させるか、又は、圧電アクチュエータ172によりZ軸方向の周りに回転させることである。さらに、交差ローラ軸受装置18は、可撓性台座171と共に、Z軸方向の周りに上方向又は下方向に回転し、また、X方向及びY方向に移動するように、駆動されることが可能である。次に、圧電被駆動マイクロ・ステージ13の微調整可能装置17と多数の交差ローラ軸受装置18とが、作業プラットフォーム19がX軸に沿って微小距離を正確に移動しまたZ軸に沿って微小角度を正確に回転することを可能にする。
【0025】
圧電被駆動マイクロ・ステージ13の微調整可能装置17及び交差ローラ軸受装置18によるプラットフォーム組立体10の作業プラットフォーム19の位置調整後、図5を参照すると、レーザ・ビーム211がレーザ干渉計21から放射される。レーザ・ビーム211が第1のビーム・スプリッタ212に放射されると、レーザ・ビーム211の強度が33%スペクトル比レーザ・ビーム(L1)と、67%スペクトル比レーザ・ビームとに分割される。前記33%スペクトル比レーザ・ビーム(L1)は第1の干渉ミラー215と第1の反射ミラー221とに直接に放射され、第1の反射ミラー221により第1の干渉ミラー215に跳ね返され、また、作業プラットフォーム19のX軸移動を得るために第1の受信機231により受け取られる。前記67%スペクトル比レーザ・ビームは第2のビーム・スプリッタ213に放射され、前記67%スペクトル比レーザ・ビームは50%スペクトル比レーザ・ビーム(L2)と50%スペクトル比レーザ・ビーム(L3)とに分割される。前記50%スペクトル比レーザ・ビーム(L2)は、90度反射ミラー214及び第3の干渉ミラー217に放射されまたこれらにより反射され、第2の反射ミラー222により第3の干渉ミラー217に跳ね返され、また作業プラットフォーム19のY軸移動を得るために第3の受信機233により受け取られる。前記50%スペクトル比レーザ・ビーム(L3)は、第2の干渉ミラー216と第1の反射ミラー221とに放射され、第1の反射ミラー221により第2の干渉ミラー216に跳ね返され、また、作業プラットフォーム19のX軸移動を得るために第2の受信機232により受け取られる。第1の受信機231及び第2の受信機232により受け取られる作業プラットフォーム19の前記X軸移動は、作業プラットフォーム19の回転角度の誤差(θz)を計算するために使用されるようにすることができる。レーザ干渉計21のレーザ・ビーム211は長距離において微細なビームに保つことができかつ消失せず、また、これが高い輝度、安定性及び精密さを有する波長を提供することができ、また、干渉現象がレーザ干渉計21により容易に観察されることが可能である。このことから、測定フィードバック組立体20は、作業プラットフォーム19のX軸移動、Y軸移動及び回転角度の誤差(θz)を正確に検出することができる。
【0026】
作業プラットフォーム19の位置が測定フィードバック組立体20により確認されると、位置決めインタフェース装置33の前記デジタル集積回路が、レーザ直接書き込みヘッド31の所望位置と、測定フィードバック組立体20により検出された作業プラットフォーム19の実際の位置とを比較するために使用されるようにすることができる。次いで、レーザ直接書き込みヘッド31が前記ワークピースに広い範囲のナノメートルパターン又はナノメートル穴群を迅速かつ正確に形成することができる。
【0027】
本発明に係る前記製造工程装置は、プラットフォーム組立体10の2つのステップの操作を用いて、作業プラットフォーム19のための長ストローク及びナノメートル距離効果を実現する。第1のステップでは、H形状の長ストローク移動ステージ12により作業プラットフォーム19が200ミリメートル×200ミリメートル(X,Y)で移動することが可能であり、また、レーザ作業組立体30が作業プラットフォーム19上の前記ワークピースに広範囲のナノメートル構造パターン又はナノメートル穴群を形成することが可能である。第2のステップでは、圧電被駆動マイクロ・ステージ13により、作業プラットフォーム19が微小距離を移動して作業プラットフォーム19の実際の位置を修正し、プラットフォーム組立体10の位置決めの正確性がナノレベルを達成し、また、本発明に係る前記製造工程装置が前記ワークピースにナノメートル構造パターン又はナノメートル穴群を形成することが可能である。
【0028】
さらに、測定フィードバック組立体20のレーザ・ビーム211は長距離において微細なビームに保つことができかつ消失せず、また、これが高い輝度、安定性及び精密さを有する波長を提供することができ、また、干渉現象がレーザ干渉計21により容易に観察されることが可能である。このことから、測定フィードバック組立体20は、作業プラットフォーム19のX軸移動、Y軸移動及び回転角度の誤差(θz)を正確に検出することができる。加えて、レーザ作業組立体30の位置決めインタフェース装置33は、レーザ直接書き込みヘッド31の所望位置と、測定フィードバック組立体20により検出された作業プラットフォーム19の実際の位置とを比較するために使用されるようにすることができる。
【0029】
したがって、本発明に係る前記製造工程装置は、前記ワークピースに広範囲のナノメートル構造パターン又はナノメートル穴群を迅速かつ正確に形成することができ、これが、前記ワークピースへのナノメートル構造パターンの形成コストを低減させ、競争力を引き上げることを可能にする。加えて、本発明に係る製造工程装置のプラットフォーム組立体10と、測定フィードバック組立体20と、レーザ作業組立体30とは、モジュール式で組み立てられ、前記製造工程装置を維持するための時間を低減することが可能である。
【0030】
本発明の多くの特徴及び利点が、本発明の構造及び特徴の詳細と共に前述の説明において述べられたが、その開示は説明だけのためにあり、変形、特に、部分の形状、サイズ及び配列の事項においては添付の特許請求の範囲が表されている用語の広い一般的な意味によって示される限り本発明の原理内において、詳細になされる。
【符号の説明】
【0031】
10 プラットフォーム組立体
11 ベース
12 長ストローク移動ステージ
13 圧電被駆動マイクロ・ステージ
14 基準セット
15 駆動装置
16 負荷フレーム
17 微調整可能装置
18 交差ローラ軸受装置
19 作業プラットフォーム
20 測定フィードバック組立体
21 レーザ干渉計
22 反射装置
23 信号受信装置
30 レーザ作業組立体
31 レーザ直接書き込みヘッド
32 制御インタフェース装置
33 位置決めインタフェース装置
【特許請求の範囲】
【請求項1】
ベースであって、頂部と、前記ベースの頂部上に据えられた、頂部と底部とを有する据え付けフレームとを備えるベースと、前記据え付けフレームの下方において前記ベースの頂面上に据えられた複合移動プラットフォームであって、前記据え付けフレームの下方において前記ベースの頂部上に据えられた、H形状にされかつ前記ベースの頂部上に堅固に据え付けられた基準セットと、該基準セット上に据えられた駆動装置であって前記基準セット上に据えられた多数のリニア・モータを有する駆動装置とを備える長ストローク移動ステージと、該長ストローク移動ステージに接続された、頂面を有する作業プラットフォームを備える圧電被駆動マイクロ・ステージとを備えるプラットフォーム組立体と、
前記プラットフォーム組立体に堅固に据え付けられた測定フィードバック組立体であって、レーザ・ビームを放射するために前記ベースの頂部に堅固に据え付けられたレーザ干渉計と、前記作業プラットフォームの頂面に据えられた反射装置と、前記ベースの頂部に堅固に据え付けられた信号受信装置であって該受信装置により反射される前記レーザ・ビームを受け取る信号受信装置とを備える測定フィードバック組立体と、
前記プラットフォーム組立体上に据えられ、前記測定フィードバック組立体に電気的に接続されたレーザ作業組立体であって、前記作業プラットフォームの上方において前記ベースの据え付けフレーム上に堅固に据え付けられたレーザ直接書き込みヘッドと、前記据え付けフレームの底部に堅固に据え付けられ、前記レーザ直接書き込みヘッドに電気的に接続され、前記レーザ直接書き込みヘッドの作業電力と自動焦点制御を管理する制御インタフェース装置と、前記制御インタフェース装置の上方において前記据え付けフレームの頂部上に据えられ、前記測定フィードバック組立体と前記レーザ直接書き込みヘッドとに電気的に接続され、前記レーザ直接書き込みヘッドの所望位置と前記測定フィードバック組立体により検出された移動信号とを比較するために前記測定フィードバック組立体により検出された前記プラットフォームの移動信号を受け取る位置決めインタフェース装置とを含む、製造工程装置。
【請求項2】
各リニア・モータは、
上方側部と、
下方側部と、
磁気先導レールを形成するために間隔をおいて前記リニア・モータの前記側部に堅固に据え付けられた多数のステータと、
前記リニア・モータの前記側部に据えられた前記ステータ間の前記リニア・モータの磁気先導レールに移動可能に据えられた、前記リニア・モータから伸びる外端部を有するアクティブセルと、
前記アクティブセルの外端部に接続された、前記アクティブセルに相対する接続側部を有する接続ボードとを備える、請求項1に記載の製造工程装置。
【請求項3】
前記圧電被駆動マイクロ・ステージは、
前記駆動装置の接続ボードに接続された、頂部を有する負荷フレームと、
前記負荷フレームの頂部に据えられた微調整可能装置であって、前記負荷フレームの頂部に据えられ周縁を有する可撓性台座と、前記負荷フレームの頂部に堅固に据え付けられ前記可撓性台座の周縁に隣接する多数の圧電アクチュエータとを備える微調整可能装置と、
前記微調整可能装置のそばにおいて前記負荷フレームの頂部に堅固に据え付けられた、頂端部を有する多数の交差ローラ軸受装置とを備え、また、
前記作業プラットフォームは、前記負荷フレームの上方において、前記可撓性台座と前記交差ローラ軸受装置の頂端部とに堅固に据え付けられている、請求項2に記載の製造工程装置。
【請求項4】
前記レーザ干渉計は、
前記ベースの頂部に堅固に据え付けられかつ前記レーザ・ビームの放射路上に据えられた第1のビーム・スプリッタと、
前記第1のビーム・スプリッタの近くにおいて前記ベースの頂部に堅固に据え付けられかつ前記レーザ・ビームの放射路上に据えられた第2のビーム・スプリッタと、
前記レーザ・ビームの放射方向を直角に変更するために前記ベースの頂部に堅固に据え付けられ、両ビームス・プリッタと整列する90度反射ミラーと、
前記ベースの頂部に据えられ、前記第1のビーム・スプリッタにより分割された前記レーザ・ビームを受け取る第1の干渉ミラーと、
前記ベースの頂部に据えられ、前記第2のビーム・スプリッタにより分割された前記レーザ・ビームを受け取る第2の干渉ミラーと、
前記ベースの頂部に据えられ、前記90度反射ミラーにより反射された前記レーザ・ビームを受け取る第3の干渉ミラーとを備える、請求項1又は3に記載の製造工程装置。
【請求項5】
前記反射装置は、
前記作業プラットフォームの頂面上に堅固に据え付けられ、前記第1の干渉ミラー及び前記第2の干渉ミラーにより放射されたレーザ・ビームを反射する第1の反射ミラーと、
前記第3の干渉ミラーにより放射された前記レーザ・ビームを反射させるために前記第1の反射ミラーに対して直角に前記作業プラットフォームの頂面に堅固に据え付けられた第2の反射ミラーとを備え、また、
前記信号受信装置は、
前記第1の反射ミラーにより反射された前記第1の干渉ミラーからの前記レーザ・ビームを受け取るために前記ベースの頂部に堅固に据え付けられた第1の受信機と、
前記第1の反射ミラーにより反射された前記第2の干渉ミラーからの前記レーザ・ビームを受け取るために前記ベースの頂部に堅固に据え付けられた第2の受信機と、
前記第2の反射ミラーにより反射された前記第3の干渉ミラーからの前記レーザ・ビームを受け取るために前記ベースの頂部に堅固に据え付けられた第3の受信機とを備える、請求項4に記載の製造工程装置。
【請求項1】
ベースであって、頂部と、前記ベースの頂部上に据えられた、頂部と底部とを有する据え付けフレームとを備えるベースと、前記据え付けフレームの下方において前記ベースの頂面上に据えられた複合移動プラットフォームであって、前記据え付けフレームの下方において前記ベースの頂部上に据えられた、H形状にされかつ前記ベースの頂部上に堅固に据え付けられた基準セットと、該基準セット上に据えられた駆動装置であって前記基準セット上に据えられた多数のリニア・モータを有する駆動装置とを備える長ストローク移動ステージと、該長ストローク移動ステージに接続された、頂面を有する作業プラットフォームを備える圧電被駆動マイクロ・ステージとを備えるプラットフォーム組立体と、
前記プラットフォーム組立体に堅固に据え付けられた測定フィードバック組立体であって、レーザ・ビームを放射するために前記ベースの頂部に堅固に据え付けられたレーザ干渉計と、前記作業プラットフォームの頂面に据えられた反射装置と、前記ベースの頂部に堅固に据え付けられた信号受信装置であって該受信装置により反射される前記レーザ・ビームを受け取る信号受信装置とを備える測定フィードバック組立体と、
前記プラットフォーム組立体上に据えられ、前記測定フィードバック組立体に電気的に接続されたレーザ作業組立体であって、前記作業プラットフォームの上方において前記ベースの据え付けフレーム上に堅固に据え付けられたレーザ直接書き込みヘッドと、前記据え付けフレームの底部に堅固に据え付けられ、前記レーザ直接書き込みヘッドに電気的に接続され、前記レーザ直接書き込みヘッドの作業電力と自動焦点制御を管理する制御インタフェース装置と、前記制御インタフェース装置の上方において前記据え付けフレームの頂部上に据えられ、前記測定フィードバック組立体と前記レーザ直接書き込みヘッドとに電気的に接続され、前記レーザ直接書き込みヘッドの所望位置と前記測定フィードバック組立体により検出された移動信号とを比較するために前記測定フィードバック組立体により検出された前記プラットフォームの移動信号を受け取る位置決めインタフェース装置とを含む、製造工程装置。
【請求項2】
各リニア・モータは、
上方側部と、
下方側部と、
磁気先導レールを形成するために間隔をおいて前記リニア・モータの前記側部に堅固に据え付けられた多数のステータと、
前記リニア・モータの前記側部に据えられた前記ステータ間の前記リニア・モータの磁気先導レールに移動可能に据えられた、前記リニア・モータから伸びる外端部を有するアクティブセルと、
前記アクティブセルの外端部に接続された、前記アクティブセルに相対する接続側部を有する接続ボードとを備える、請求項1に記載の製造工程装置。
【請求項3】
前記圧電被駆動マイクロ・ステージは、
前記駆動装置の接続ボードに接続された、頂部を有する負荷フレームと、
前記負荷フレームの頂部に据えられた微調整可能装置であって、前記負荷フレームの頂部に据えられ周縁を有する可撓性台座と、前記負荷フレームの頂部に堅固に据え付けられ前記可撓性台座の周縁に隣接する多数の圧電アクチュエータとを備える微調整可能装置と、
前記微調整可能装置のそばにおいて前記負荷フレームの頂部に堅固に据え付けられた、頂端部を有する多数の交差ローラ軸受装置とを備え、また、
前記作業プラットフォームは、前記負荷フレームの上方において、前記可撓性台座と前記交差ローラ軸受装置の頂端部とに堅固に据え付けられている、請求項2に記載の製造工程装置。
【請求項4】
前記レーザ干渉計は、
前記ベースの頂部に堅固に据え付けられかつ前記レーザ・ビームの放射路上に据えられた第1のビーム・スプリッタと、
前記第1のビーム・スプリッタの近くにおいて前記ベースの頂部に堅固に据え付けられかつ前記レーザ・ビームの放射路上に据えられた第2のビーム・スプリッタと、
前記レーザ・ビームの放射方向を直角に変更するために前記ベースの頂部に堅固に据え付けられ、両ビームス・プリッタと整列する90度反射ミラーと、
前記ベースの頂部に据えられ、前記第1のビーム・スプリッタにより分割された前記レーザ・ビームを受け取る第1の干渉ミラーと、
前記ベースの頂部に据えられ、前記第2のビーム・スプリッタにより分割された前記レーザ・ビームを受け取る第2の干渉ミラーと、
前記ベースの頂部に据えられ、前記90度反射ミラーにより反射された前記レーザ・ビームを受け取る第3の干渉ミラーとを備える、請求項1又は3に記載の製造工程装置。
【請求項5】
前記反射装置は、
前記作業プラットフォームの頂面上に堅固に据え付けられ、前記第1の干渉ミラー及び前記第2の干渉ミラーにより放射されたレーザ・ビームを反射する第1の反射ミラーと、
前記第3の干渉ミラーにより放射された前記レーザ・ビームを反射させるために前記第1の反射ミラーに対して直角に前記作業プラットフォームの頂面に堅固に据え付けられた第2の反射ミラーとを備え、また、
前記信号受信装置は、
前記第1の反射ミラーにより反射された前記第1の干渉ミラーからの前記レーザ・ビームを受け取るために前記ベースの頂部に堅固に据え付けられた第1の受信機と、
前記第1の反射ミラーにより反射された前記第2の干渉ミラーからの前記レーザ・ビームを受け取るために前記ベースの頂部に堅固に据え付けられた第2の受信機と、
前記第2の反射ミラーにより反射された前記第3の干渉ミラーからの前記レーザ・ビームを受け取るために前記ベースの頂部に堅固に据え付けられた第3の受信機とを備える、請求項4に記載の製造工程装置。
【図1】



【図2】
【図3】

【図4】

【図5】

【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−11779(P2013−11779A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−145255(P2011−145255)
【出願日】平成23年6月30日(2011.6.30)
【出願人】(509161299)國立虎尾科技大學 (4)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月30日(2011.6.30)
【出願人】(509161299)國立虎尾科技大學 (4)
【Fターム(参考)】
[ Back to top ]