
Fターム[5F031JA14]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 手段(センサ) (4,555) | 検出時に検出対象物とセンサが相対的に移動 (857) | 検出対象物が移動 (498)
Fターム[5F031JA14]に分類される特許
1 - 20 / 498
基板搬送装置
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
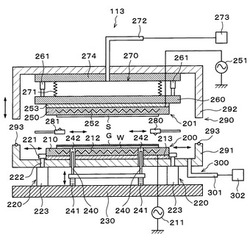
【課題】被処理基板と支持基板を適切に接合する。
【解決手段】接合装置の接合部113は、被処理ウェハWを保持する第1の保持部200と、第1の保持部200に対向配置され、支持ウェハSを保持する第2の保持部201と、第2の保持部201に保持された支持ウェハSを覆うように設けられた鉛直方向に伸縮自在の圧力容器271を備え、当該圧力容器271内に気体を流入出させることで第2の保持部201を第1の保持部200側に押圧する加圧機構270と、第1の保持部200、第2の保持部201及び圧力容器271を内部に収容し、内部を密閉可能な処理容器290と、処理容器290内の雰囲気を減圧する減圧機構300と、を有している。
(もっと読む)
露光装置

【課題】移動方向に直交する方向に複数個の露光対象領域が設けられた露光対象基材を一方向に連続的に供給して露光する露光装置において、露光対象基材がその移動方向に直交する方向に伸縮した場合に、マスクの位置を精度よく補正できる露光装置を提供する。
【解決手段】フィルム2には、その移動方向に直交する方向に複数の露光対象領域4が設けられている。光源から出射された露光光は、フィルム移動方向に直交する方向に複数枚配列されたマスク3のパターンを介してフィルムに照射される。フィルム2の露光対象領域間及び両端部には、伸縮確認用マーク2cが設けられており、この伸縮確認用マーク2cをマスクアライメントマークと共にカメラ51により観察し、制御部7は、伸縮確認用マーク2cがフィルム移動方向に直交する方向にずれたときに、駆動部6により、このずれに応じてマスク3の位置を補正する。
(もっと読む)
ユニット搬出入装置
【課題】複数のウェーハを自動的に搬送して連続的に加工を行うための搬出入装置について、部品点数が少なく、簡易な構成にて実現可能であり、更に、安価な製作コストを実現できる搬出入装置を提供する。
【解決手段】ユニット支持部には、複数の該被加工物ユニットを重ねて収容可能なユニットケースが着脱自在に配設され、搬出入手段のフレーム保持部の直下に、ターンテーブルのユニット通過部と、保持手段が位置付けられた際に、搬出入手段のフレーム保持部を上下動させることで保持手段に対する被加工物ユニットの搬入又は搬出が行われ、搬出入手段のフレーム保持部の直下に、ターンテーブルのユニット支持部が位置付けられた際に、搬出入手段のフレーム保持部を上下動させることでユニット支持部に対する被加工物ユニットの搬出又は搬入が行われる、ユニット搬出入装置とする。
(もっと読む)
アーム型搬送装置
【課題】アーム型搬送装置とは別の場所に設置したアライナー等に逐一搬送対象物を搬送することなく、搬送対象物の中心位置を検出可能なアーム型搬送装置を提供する。
【解決手段】正円形搬送対象物Wを保持する第一のリンク21を回転軸C1を介して水平面内で回動可能となるようにベース部材たる第二のリンク22に取り付けたアーム機構2と、前記第二のリンク22に前記回転軸C1とともに取り付けられ、取り付け位置に応じて定まる検出位置Seに正円形搬送対象物Wのエッジが位置したことを検出するエッジ検出部3と、前記第二のリンク22に対する前記第一のリンク21の回転角度θを検出する回転角度検出部27と、正円形搬送対象物Wのエッジがエッジ検出部3を通過した際に回転角度検出部27で検出された対応する回転角度θに基づいて前記リンク21に対する正円形搬送対象物Wの中心位置を算出する中心位置算出部41とを具備して構成した。
(もっと読む)
基体処理システム用の基体搬送装置
【課題】基体を処理するための処理システムの基体搬送装置において、搬送チャンバ内でのケーブル引き回し処理を不要とする。
【解決手段】基体搬送装置は、チャンバ壁12、テーブル14、リニアモータ搬送機構16、光学窓18、及び、レーザ計測器を備える。チャンバ壁は、搬送空間Sを画成する。テーブルは、搬送空間内に収容されている。当該テーブル上には基体を載置可能である。リニアモータ搬送機構は、搬送空間内においてリニアモータによりテーブルを移動させる。光学窓は、搬送空間と当該搬送空間の外部空間との間に設けられている。例えば、光学窓は、チャンバ壁に画成された開口を封止するように設けられる。レーザ計測器は、光学窓を介してテーブルに向けてレーザ光を照射し、テーブルからの反射光を受けて、テーブルの位置を計測する。
(もっと読む)
ウエハ搬送装置、太陽電池製造装置、ウエハ搬送方法、制御プログラムおよび記録媒体
【課題】厚みに個体差のあるウエハを破損させることなく搬送できるウエハ搬送装置を提供する。
【解決手段】本発明に係るウエハ搬送装置1は、ウエハ2を保持する保持部4と、保持部4の移動を制御する移動制御部71と、保持部4によるウエハ2の保持を制御する保持制御部72と、ウエハ2の下端のトレー3の上面に対する鉛直方向の距離が第1の距離であるか否かを判定する判定部73とを備える。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】経年変化に伴ってレーザー測長系のレーザー光源の出力特性が変化しても、移動ステージの位置を精度良く検出して、基板の位置決めを精度良く行う。
【解決手段】移動ステージに複数の反射手段34a,34b,35を取り付け、複数のレーザー干渉計32a,32b,33により、レーザー光源31a,31bからのレーザー光と各反射手段34a,34b,35により反射されたレーザー光との干渉を複数箇所で測定する。各レーザー干渉計32a,32b,33の測定結果から、移動ステージの位置を検出し、検出結果に基づき、移動ステージによりチャック10a,10bを移動して、基板1の位置決めを行う。各レーザー干渉計32a,32b,33が受光したレーザー光の強度の変化を検出し、検出したレーザー光の強度の変化を補う様に、レーザー光源31a,31bへ供給する駆動電流を制御する。
(もっと読む)
露光装置用のアライメント装置
【課題】基板とマスクとのアライメントを高精度で行うことができる露光装置のアライメント装置を提供する。
【解決手段】アライメント装置には、アライメント用の光を出射するアライメント光源5が設けられており、例えばカメラ6に内蔵されている。そして、アライメント光源5から出射されたアライメント光は、基板1及びマスク2に照射され、反射光がカメラ6により検出される。アライメント時には、マイクロレンズアレイ3は、マスクアライメントマーク2aと基板アライメントマーク1aとの間に移動され、基板アライメントマーク1aから反射した正立等倍像がマスク2上に結像される。カメラ6は、基板アライメントマーク1aをマスクアライメントマーク2aと共に複数回撮像し、撮像された像が重ね合わせられ、第2の制御装置9は、検出されたアライメントマークにより、基板1とマスク2とのアライメントを行う。
(もっと読む)
基板保持部材および当該半導体保持部材への半導体基板の取り付け位置調整方法
【課題】部材の位置合わせに係る工程数を減少させ、位置合わせに要する時間を短縮し、半導体製造装置の生産性を向上させる。
【解決手段】基板保持部材1は、半導体基板11を保持する保持面を備えたベース2と少なくとも1つの開口部を有していて保持面と対向するようにベース2上に支持されたマスク9とを備えている。さらに、基板保持部材1は、保持面とマスク9との間に、半導体基板11が挿通される基板挿通部14を備えている。
(もっと読む)
真空処理装置および真空処理方法
【課題】位置ずれの量を抑制してダウンタイムを低減できる真空処理装置または真空処理方法を提供する。
【解決手段】内側が減圧される処理室及びこの処理室内に配置された試料台を有する真空容器と、この真空容器と連結されて前記ウエハを2つのアームの何れかに載せて搬入または搬出するロボットと、このロボットが前記ウエハを搬入または搬出する際にこのウエハの所定の位置のズレの量を検出する手段と、この検出されたズレの量に基づいて前記ロボットの動作を調節する調節器とを備え、前記調節器は、予めティーチングを行った結果に基づいて前記ロボットの動作を調節するものであって、前記ロボットが予めティーチングを行った後にウエハを所定のパターンで搬送した際に検出されたウエハの位置ズレの量の情報に基づいて再度のティーチングを行った後にウエハの処理を行う。
(もっと読む)
フレーム供給装置およびフレーム供給方法
【課題】近年、特にフレームサイズの大型化と薄板化が進み、フレームのそりが問題となってきている。フレームのそりが大きい場合には、フレームの取り出しを失敗する可能性が高い。フレームの取り出しを失敗した場合、即ち、フレームが取り出せなかった場合には、実装のスループットが長くなり、さらに、取り出せなかったフレームは、オペレータが手動で取り除く必要が出てくる。このため作業工数も増加する。
【解決手段】ローダフィーダ部がフレームマガジンからフレームを取り出す前に、ローダリフト部をY方向に移動させ、その後に前記ローダフィーダ部が前記フレームマガジン部からフレームを取り出す。
(もっと読む)
基板処理装置、および薄膜太陽電池の製造装置
【課題】基板処理装置のセンサ誤作動を抑制する。
【解決手段】本発明に係るスパッタリング装置1は、発光端面65aと受光端面66aとの少なくとも一方を端面として備えた光ファイバ65・66がチャンバ2内に配置された光ファイバセンサ6を備え、光ファイバセンサ6の端面は、チャンバ2の底面から所定の高さ位置で、水平方向に対して上向きに配置されている。
(もっと読む)
製造工程装置
【課題】ワークピース上に正確かつ迅速にナノメートル構造パターンを形成する。
【解決手段】複合プラットフォームはベースに据えられ、長ストローク移動ステージ12と、圧電被駆動マイクロ・ステージ13とを有する。長ストローク移動ステージは基準セット14と、駆動装置15とを有し圧電被駆動マイクロ・ステージは長ストローク移動ステージに接続され、作業プラットフォームを有する。測定フィードバック組立体20はプラットフォーム組立体10に堅固に据え付けられ、レーザ干渉計と、反射装置と、信号受信装置とを有する。レーザ作業組立体30は、プラットフォーム組立体に据えられ、測定フィードバック組立体に電気的に接続され、レーザ直接書き込みヘッド31と、制御インタフェース装置と、位置決めインタフェース装置33とを有する。
(もっと読む)
基板位置検出方法
【課題】基板を検出する検出手段の数を少なくしても、基板の位置ズレを確実に検出可能な基板位置検出方法を提供する。
【解決手段】1つの検出手段51に対して、基板15に設定された3つの検出位置E1〜E3が順次重なるように基板15を移動させる(検出工程)。次に、得られた第一検出位置E1、第二検出位置E2、および第三検出位置E3における基板15の検出タイミング(基板検出信号)と、ロボットハンドの移動量とから、ロボットハンドに対する基板15の実際の中心位置(検出値)を算出する。
(もっと読む)
半導体ウエハマウント方法および半導体ウエハマウント装置
【課題】収納容器内の搬出対象物を精度よく判別してリングフレームと半導体ウエハの両裏面にわたって支持用の粘着テープを貼り付けてマウントフレームを作成する。
【解決手段】ウエハ収納容器からワークを持ち上げて取り出し、表面側を第1識別センサで検出し、ワークがウエハまたはスペーサのいずれであるかを判別する。ワークがウエハの場合、当該表面における保護テープの有無も判別する。表面に保護テープが無い場合、さらにウエハ収納容器の外周近傍に配備された第2識別センサによってウエハ裏面を検出し、保護テープの有無を判別する。
(もっと読む)
荷電粒子線装置および静電チャック装置
【課題】反りのある試料に対しても正常な保持動作を行う荷電粒子線装置を提供する。
【解決手段】前記課題を解決するために、本発明の荷電粒子線装置1は、試料ステージ21に保持された試料101に電子線12を照射し、試料101の画像を生成する荷電粒子線装置1であって、試料101の反り量を計測する反り量計測部35と、試料101を吸着する複数の吸着部221を有する静電チャックと、複数の吸着部221のそれぞれの下部に設けられた昇降可能な昇降部222と、反り量計測部35が計測した試料101の反り量に合わせて昇降部222を昇降させる昇降制御部633と、を備えることを特徴とする。
(もっと読む)
基板搬送装置、これを備える塗布現像装置、及び基板搬送方法
【課題】基板を保持して搬送する基板保持部の位置を検出することにより、基板の搬送を監視することができる基板搬送装置を提供する。
【解決手段】基板を支持する支持部を含む搬送機構と、ラインセンサ、及び該ラインセンサに光を照射する光源を含み、前記搬送機構が動作して前記支持部が移動したときに前記光が前記支持部により遮られ得るように配置される位置検出部と、前記ラインセンサからの信号に基づいて、前記搬送部の位置を検出する制御部とを備える基板搬送装置が提供される。
(もっと読む)
ダイ位置判定システム。
【課題】吸着ノズルで吸着するダイの位置を判定するダイ位置判定システムにおいて、生産能率向上とダイの歩留まり向上とを両立させる。
【解決手段】ウエハパレット22の上面の2箇所に基準位置マーク41を設けると共に、予め、基準位置マーク41の位置を基準とするウエハパレット22の座標系で作成されたダイ配列位置情報を記憶手段に記憶しておく。ダイピックアップ装置の所定位置にセットされたウエハパレット22上の2つの基準位置マーク41をカメラで撮像して、その撮像画像を処理してダイピックアップ装置の機械座標系における2つの基準位置マーク41の位置を認識して、ダイピックアップ装置の機械座標系に対するウエハパレット22の座標系の位置ずれ量を演算し、その位置ずれ量で前記ダイ配列位置情報を補正することでダイピックアップ装置の機械座標系における各ダイ21の配列位置を求める。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体、基板処理装置及び基板処理システム
【課題】基板毎に外径寸法が変動した場合でも、基板の周辺部における塗布膜を除去する領域の幅寸法を一定にすることができる基板処理方法を提供する。
【解決手段】表面に塗布膜が形成された基板を回転させた状態で、基板の周辺部の表面にリンス液供給部80によりリンス液を供給することによって、リンス液を供給した位置の塗布膜を選択的に除去する基板処理方法において、基板を予め基板搬送部A3により搬送する際に、基板搬送部A3に設けられた検出部5により、基板の周辺部の位置を検出し、検出した位置に基づいて、周辺部の表面にリンス液を供給する時のリンス液供給部80の位置を決定する。
(もっと読む)
1 - 20 / 498
[ Back to top ]