
Fターム[5F031LA07]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 動作機構等 (3,476) | 動力源 (1,318) | モータ (1,169)
Fターム[5F031LA07]の下位に属するFターム
Fターム[5F031LA07]に分類される特許
1 - 20 / 556
搬送装置
基板の処理装置
部品供給装置および部品位置認識方法
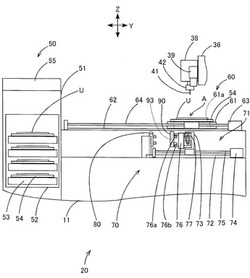
【課題】ウエハの円周位置を簡易且つ確実に精度良く検出し、ウエハカット部品の位置を高精度に認識することができる部品供給装置および部品位置認識方法を提供すること。
【解決手段】部品供給装置20は、部品突上げ装置70の第2移動装置71に装着されたウエハ照明装置80で部品供給位置Aに搬送されたウエハUに対し下方から光を広角に照射し、部品装着装置30の第1移動装置31に取付けられたカメラ39でウエハUの円周の一部を撮像する。このため、画像にはウエハUの表面に形成された回路等は写り込まず、ウエハUは影として写ることになる。これにより、ウエハUの円周位置を簡易且つ確実に精度良く検出し、ウエハカット部品Pの位置を高精度に認識することができる。よって、従来の光センサは不要となり、部品供給装置20の低コスト化および小型化を図ることができる。
(もっと読む)
ウエハ関連データ管理方法及びウエハ関連データ作成装置

【課題】オフラインでダイ供給装置の突き上げピンの突き上げ動作や吸着ノズルのダイ吸着動作に関するデータをセットアップできるようにする。
【解決手段】ウエハパレットをセットするセット台と、該セット台にセットしたウエハパレットのダイシングシート34上のダイ31を吸着するテスト用吸着ノズル51と、ダイシングシート34のうちのテスト用吸着ノズル51で吸着しようとするダイ31の貼着部分を突き上げるテスト用突き上げピン53と、ダイシングシート34上のダイ31を撮像するテスト用カメラ54とを備えたウエハ関連データ作成装置47を使用し、ウエハ関連データの作成対象となるウエハパレットをウエハ関連データ作成装置47のセット台にセットし、テスト用カメラ54で撮像した画像の処理、テスト用突き上げピン53の突き上げ動作及びテスト用吸着ノズル51のダイ吸着動作を実行してウエハ関連データを作成する。
(もっと読む)
エネルギー線照射装置及びワーク搬送機構
【課題】エネルギー線照射システムにおいて、異なる寸法のワークに効率的にエネルギー線を照射できるコンパクトで低コストの搬送機構を実現する。
【解決手段】異なる寸法のワークW1、W2がそれぞれ搭載される第1、第2ワークホルダ31a、32aと、各々のワークホルダを各々のワーク授受領域とエネルギー線照射領域AR1との間で進退移動させる進退機構33と、互いに異なる位置に設けられた第1及び第2ワーク収容部21a、22aと、第1のワーク授受領域にある第1ワークホルダ31aと第1ワーク収容部21aとの間でワークW1を搬送する第1搬送アームと、第2のワーク授受領域にある第2ワークホルダ32aと第2ワーク収容部22aとの間でワークを搬送する第2搬送アームとを設けた。
(もっと読む)
移動体装置及び露光装置、並びにデバイス製造方法
【課題】ウエハステージを精密駆動する。
【解決手段】 ウエハステージWSTは、粗動ステージ82と、微動ステージ83と、微動ステージ83のX軸方向の一側と他側のそれぞれに設けられた一対のボイスコイルモータMbと、微動ステージ83のX軸及びY軸のそれぞれに交差する軸Lc1,Lc2にそれぞれ平行な方向の一側と他側に設けられた二対のEIコアMc1、Mc2、Mc3、Mc4とを備えている。これにより、ウエハWを保持するウエハテーブルWTBを精密に駆動することが可能となるとともに、ボイスコイルモータ及びEIコアを粗動ステージ82内にコンパクトに配置することが可能になる。
(もっと読む)
位置決め装置
【課題】回動駆動機構を設けることなく水平方向に対する移動体の移動量差に応じた回転角度で回転させて位置決めすることができ、装置自体を小型化及び軽量化する。
【解決手段】各電動モータを同期駆動してそれぞれの送りねじ9、11を所要の方向へ回転することにより各水平可動体17、19を一致する送り量で水平方向へ移動させ、水平方向に対する各水平可動体17,19の移動量の差に応じて一対のアーム37,41を平行揺動して取り付け部材35を回転して被位置決め手段を位置決めする。
(もっと読む)
基板搬送装置
【課題】内部気圧の変動によるチャンバの変形によってもロボットハンドの位置変動がなく、かつ、比較的安価に実現可能な構造の基板搬送装置を提供する。
【解決手段】真空チャンバと、前記真空チャンバ内に設けられ、搬入された基板を保持して所望の位置に搬送するための搬送ロボットを備えた基板搬送装置であって、前記搬送ロボットは、当該基板搬送装置を設置する床面に固定されると共に、その一部を、Oリングを介して、前記真空チャンバを構成する壁の一部に、当該真空チャンバ内を気密に保持可能で、かつ、相互に移動可能して、取り付けられている。
(もっと読む)
基板処理システム、基板搬送方法、プログラム及びコンピュータ記憶媒体
【課題】基板処理システムのフットプリントを小さくする。
【解決手段】処理ステーション3と、カセット載置台12と、処理ステーション3とカセット載置台12との間に配置されたウェハ搬送機構21a、21bと、を備えた基板処理システム1において、処理ステーション3とウェハ搬送機構21a、21bとの間には、カセット載置台12と処理ステーション3との間で搬送されるウェハ、及び各処理ユニットの各段の間で搬送される基板を一時的に収容する複数の受け渡しユニットが多段に設けられた受け渡しブロック22が配置されている。ウェハ搬送機構21a、21bは、カセット載置台12と受け渡しブロック22との間でウェハを搬送する第1の搬送アームと、受け渡しユニットの各段の間でウェハを搬送する第2の搬送アームとを備え、ウェハ搬送機構21a、21bは、上下方向に並べて設けられている。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】経年変化に伴ってレーザー測長系のレーザー光源の出力特性が変化しても、移動ステージの位置を精度良く検出して、基板の位置決めを精度良く行う。
【解決手段】移動ステージに複数の反射手段34a,34b,35を取り付け、複数のレーザー干渉計32a,32b,33により、レーザー光源31a,31bからのレーザー光と各反射手段34a,34b,35により反射されたレーザー光との干渉を複数箇所で測定する。各レーザー干渉計32a,32b,33の測定結果から、移動ステージの位置を検出し、検出結果に基づき、移動ステージによりチャック10a,10bを移動して、基板1の位置決めを行う。各レーザー干渉計32a,32b,33が受光したレーザー光の強度の変化を検出し、検出したレーザー光の強度の変化を補う様に、レーザー光源31a,31bへ供給する駆動電流を制御する。
(もっと読む)
基板供給装置
【課題】短時間で基板を交換できる基板供給装置を提供する
【解決手段】基板供給装置1は、一体に回転および昇降可能に設けられ、回転軸周りに対称に配置された複数のアーム4と、それぞれ、アーム4に遊びを有するように支持され、且つ、基板を保持可能な複数の小定盤6と、アーム4の回転および昇降によって小定盤6が載置され、且つ、小定盤6を遊びの範囲内で位置決めして保持する定盤保持機構9,10を備える主定盤7とを備える。
(もっと読む)
位置合わせ方法、露光方法、デバイス製造方法、及びフラットパネルディスプレイの製造方法
【課題】基板を露光する途中での、基板の取り外しを前提とする基板保持部材の採用を可能にする位置合わせ方法を提供する。
【解決手段】 基板P上に複数の区画領域(SA1、SA2等)を形成するに当たり、基板P上に区画領域を形成する度毎に、基板Pを該基板Pの面に平行な面内でステップ移動し、該ステップ移動の前後で、基板Pの同一の検出対象部(例えばエッジ)の位置情報を例えば複数のセンサ122X1、122X2、122Y1を用いて検出し、その検出結果に基づいて、区画領域の形成の際に、基板Pを露光領域IAに対して位置合わせする。
(もっと読む)
剥離装置、及び電子デバイスの製造方法
【課題】剥離時の損傷を抑制できる剥離装置を提供すること。
【解決手段】基板2と、基板2を補強する補強板3との界面8を一端側から他端側に向けて順次剥離する剥離装置10において、基板2及び補強板3を含む積層体6の第1主面6bを支持する支持手段20と、積層体6の第2主面6aを吸着する可撓性板30と、可撓性板30上に間隔をおいて固定され支持手段20に対して独立に移動可能な複数の可動体40と、複数の可動体40の移動を制御する制御装置80とを備え、複数の可動体40のうち剥離時に最初に支持手段20に対して離間する可動体40は、剥離開始前に界面8に対して垂直な方向から見たときに界面8の剥離開始端8bの後方に配置されている。
(もっと読む)
保護膜形成装置およびレーザー加工機
【課題】被加工物の異なる領域にそれぞれ異なる液状樹脂を被覆することができる保護膜形成装置を提供する。
【解決手段】保護膜形成装置であって、被加工物保持手段と、被加工物に第1の液状樹脂を微細粒子として噴射する第1の液状樹脂噴射手段70aおよび第2の液状樹脂を微細粒子として噴射する第2の液状樹脂噴射手段70bと、液状樹脂噴射手段70と被加工物保持手段を相対的に加工送り方向(X軸方向)に移動せしめる加工送り手段と、X軸方向と直交する割り出し送り方向(Y軸方向)に移動せしめる割り出し送り手段と、液状樹脂噴射手段70と被加工物保持手段との相対位置関係を検出するX軸方向位置検出手段と、Y軸方向に相対移動する液状樹脂噴射手段70と被加工物保持手段との相対位置関係を検出するY軸方向位置検出手段と、X軸方向位置検出手段およびY軸方向位置検出手段からの検出信号に基いて噴射手段を制御する制御手段とを具備する。
(もっと読む)
ロボットのアーム構造およびロボット
【課題】ロボットの最小旋回径を小さくすること。
【解決手段】実施形態に係るロボットは、第1アーム部、第2アーム部、中間リンク部、第1リンク部および第2リンク部を備える。第1リンク部は、第1アーム部と中間リンク部と固定ベース部との間で第1平行リンク機構を形成する。第2リンク部は、第2アーム部と中間リンク部と可動ベース部との間で第2平行リンク機構を形成する。そして、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離は、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離よりも短い。
(もっと読む)
基板姿勢変更装置および基板処理装置
【課題】基板姿勢変更装置の製造コストを低減すること。
【解決手段】基板姿勢変更装置5は、基板Wを保持している状態で回転軸線L1まわりに回転可能であり、基板Wを保持している状態での重心GCの位置が回転軸線L1に対してずれている保持ユニット6と、回転軸線L1まわりの回転角が異なる複数の位置で保持ユニット6の回転を停止可能であり、前記複数の位置で保持ユニット6を保持可能な回転停止ユニット17と、回転軸線L1に交差する交差方向D1に保持ユニット6を移動させ、交差方向D1に保持ユニット6を加速または減速させる走行ユニット9とを含む。
(もっと読む)
基板処理装置、プログラム、コンピュータ記憶媒体、警報表示方法及び基板処理装置の点検方法
【課題】基板処理装置に異常が発生した場合の点検作業を、迅速に誤りなく行う。
【解決手段】複数の処理ユニットと、各処理ユニットでの異常発生を表示する表示手段とを備えた基板処理装置は、異常発生の警報の内容と当該異常発生により点検が必要になる部位とを関連付けた情報と、点検対象部位を、異常が発生していない他の部位からアイソレートするために操作される機器の情報と、点検対象部位の配置及びアイソレートの際の操作対象機器の配置と、アイソレートの際の操作対象機器の操作手順と、を記憶する記憶手段と、記憶手段の情報に基づいて、異常発生により点検が必要となる部位をアイソレートするために操作される機器を特定し、さらに特定された機器の配置を特定して表示手段に出力する異常特定手段と、記憶手段の情報に基づいて、異常特定手段で特定された機器の操作手順を特定して表示手段に出力する操作手順特定手段と、を有している。
(もっと読む)
フレーム供給装置およびフレーム供給方法
【課題】近年、特にフレームサイズの大型化と薄板化が進み、フレームのそりが問題となってきている。フレームのそりが大きい場合には、フレームの取り出しを失敗する可能性が高い。フレームの取り出しを失敗した場合、即ち、フレームが取り出せなかった場合には、実装のスループットが長くなり、さらに、取り出せなかったフレームは、オペレータが手動で取り除く必要が出てくる。このため作業工数も増加する。
【解決手段】ローダフィーダ部がフレームマガジンからフレームを取り出す前に、ローダリフト部をY方向に移動させ、その後に前記ローダフィーダ部が前記フレームマガジン部からフレームを取り出す。
(もっと読む)
ステージ装置及びプロセス装置
【課題】機能材料層の厚さ分布を高精度かつ短時間で制御可能な技術を提案する。
【解決手段】実施形態に係わるステージ装置は、被処理基板13の下面側に配置され、上下方向に駆動される複数の高さ制御素子を備える高さ制御ユニット12と、高さ制御ユニット12を制御する制御ユニット15とを備える。制御ユニット15は、被処理基板13の上面を複数のエリアに区分し、かつ、複数の高さ制御素子の各々の高さをデータ値に基づいて制御することにより各エリアの高さを独立に設定する。
(もっと読む)
1 - 20 / 556
[ Back to top ]