
Fターム[5F031LA06]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 動作機構等 (3,476) | 動力源 (1,318)
Fターム[5F031LA06]の下位に属するFターム
Fターム[5F031LA06]に分類される特許
1 - 20 / 68
基板搬入出装置
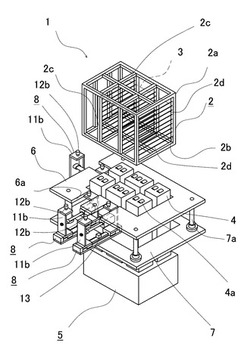
【課題】収納棚を保持台に位置決めするための位置決め個所を少なくして、収納棚を保持する保持台との合計質量を軽減でき、その昇降手段の大型化を防ぐことができる基板搬入出装置を提供する。
【解決手段】基板搬入出装置1は、下面に枠体2aを持つ収納棚2と、この収納棚2を移載台5の周囲に保持する保持台6とを備え、枠体2aの交差する二辺それぞれに位置して対となる位置決めローラ12bを配置し、これら位置決めローラ12bを位置決めローラ相対離合手段8により相対離合可能に構成し、相対離合する位置決めローラ12bにより枠体2aを挟むように構成している。この構成により、収納棚2が保持台6に載置されると、位置決めローラ12bが枠体2aを挟む方向に相対移動して、各位置決めローラ12bの中間位置に位置決めすることができる。
(もっと読む)
基板搬送用ハンドおよび基板搬送用ハンドを備えた基板搬送装置

【課題】ハンドをカセット内へ進入させることなくハンド上へ基板を載置して搬送すること。
【解決手段】カセットへ基板の出し入れ方向に沿って連結された状態でかかるカセットが備える駆動機構の駆動を受けて回転する受動ローラを備え、かかる受動ローラをその先端部に有する板状のフォークと、上記の受動ローラの回転をかかるフォークに沿って伝達するベルトと、かかるベルトによる回転の伝達を受けて上記の受動ローラと同じ回転方向に回転するその他のローラとを備えるように基板搬送用ハンドおよびかかる基板搬送用ハンドを備える基板搬送装置を構成する。
(もっと読む)
浮上塗布装置及び浮上塗布方法
【課題】塗布膜に形成されるムラの発生を抑えるとともに、タクトタイムを短縮できる塗布装置および塗布方法を提供する。
【解決手段】基板10上に吐出装置3aから塗布液を吐出し、塗布後に塗布基板を乾燥装置5に浮上搬送機構6により搬送する塗布装置1であって、前記浮上搬送機構は振動浮上機構42を有し、搬送工程において基板上に塗布された塗布膜を前記振動浮上搬送機構により基板に生じる振動により引き起こされるレベリング効果より塗布膜に生じる塗布ムラを解消する。
(もっと読む)
パターニングデバイスサポート
【課題】高加速度下で機能することができるパターニングデバイスのスリップ防止解決法を提供する。
【解決手段】リソグラフィ装置のパターニングデバイスステージの移動中のパターニングデバイス270の滑りを実質的に除去するための構成が提供される。このような構成の一つは、保持システムとサポート輸送装置230とを含む。保持システムは、支持デバイス250と、保持デバイス280と、磁歪アクチュエータ260とを含む。保持デバイス280はパターニングデバイス270を支持デバイス250に解放可能に結合する。磁歪アクチュエータ260は、パターニングデバイス270に解放可能に結合され、パターニングデバイス270に加速力を付与する。サポート輸送装置230は支持デバイス250に結合され、磁歪アクチュエータ260による力の付与と同時に支持デバイス250移動し、パターニングデバイス270滑りを防止する。
(もっと読む)
基板の撓み補正装置および基板の取り出し方法
【課題】既存の設備の大幅な改良を伴うことなく、搬送アームと基板との衝突を確実に防止すること。
【解決手段】撓み補正装置3は、キャリア1に収納されたウエハ(基板)Wの表面に略直交する方向に移動可能な支持棒5(付勢手段)を備える。支持棒5は、キャリア1に収納されたウエハWの中央部に当接または対向し、当該ウエハWの中央部を付勢することにより、ウエハWの撓みを補正する。このようにウエハWの撓みを防止した状態で、搬送アーム2をウエハWの下側に挿入してウエハWを取り出すことにより、搬送アーム2とウエハWとの衝突を確実に防止することができる。
(もっと読む)
把持装置
【課題】クランプ部により薄板状物をクランプする際の衝撃を緩和しながら、位置検出器を用いることに起因する電磁アクチュエータの構成の複雑化を抑制することが可能な把持装置を提供する。
【解決手段】この電磁グリッパ(把持装置)100は、ウエハ9をクランプする方向に移動する可動部25を含むクランプ部24と、クランプ部24の可動部25をクランプする方向に常時付勢するばね部材30と、少なくともクランプ解除状態からクランプ状態に移行する際に推力を発生させる電磁アクチュエータ22とを備える。また、電磁アクチュエータ22は、クランプ解除状態からクランプ状態に移行する際に、ばね部材30のクランプ方向への付勢力による可動部25の移動速度を低減する方向に推力を発生させる励磁コイル27a〜27cを有する励磁回路28を含む。
(もっと読む)
θZ駆動装置およびそれを備えたステージ装置、検査装置
【課題】半導体製造装置などで使用される基板を位置決めするθZ駆動装置を小型にすることを課題とする。
【解決手段】ベース6に立設する円筒状のフレーム17と、フレーム17の内面に設けられてテーブル1をZ方向とθ方向に駆動するθZアクチュエータ15と、テーブル1がZ方向へ昇降可能となるよう支持する昇降支持部7と、テーブル1がθ方向へ回転可能となるよう支持する回転支持部4と、テーブル1の昇降位置および回転位置を取得するための位置検出部31と、を備え、昇降支持部7と回転支持部4と位置検出部31のすべてが、θZアクチュエータ15の内側にあって、かつθZアクチュエータ15のZ方向の高さにほぼ収まるよう配置されるよう構成した。
(もっと読む)
紫外線照射装置、紫外線照射方法及び基板処理装置
【課題】歩留まり低下を防ぐことが可能な紫外線照射装置、紫外線照射方法及び基板処理装置を提供すること。
【解決手段】吸引機構を有するチャンバと、前記チャンバ内に設けられ、前記基板を保持して移動可能に設けられた保持機構と、前記保持機構に保持された前記基板に紫外線を照射する紫外線照射機構と、前記チャンバ内の前記基板を加熱する加熱機構と、前記チャンバ外部に設けられた駆動源、及び、前記保持機構に接続され前記駆動源の駆動力を前記保持機構に伝達する伝達部材、を有する移動機構とを備える。
(もっと読む)
矩形基板の載置位置矯正方法及び塗布装置
【課題】矩形の基板がステージ上で傾いて載置されても、当該基板を位置決めし直すことのできる矩形基板の載置位置矯正方法を提供する。
【解決手段】基板Wの左辺Lに二点で接触可能な一対の第一部材11及び第二部材12を前後方向基準線X0に平行な直線X1上に位置させ、基板Wの前辺Fに一点で接触可能な第三部材13、及び、基板Wの後辺Bに一点で接触可能な第七部材17を、基板Wの前後方向寸法bよりも広い間隔でかつ左右方向基準線を中心として位置させる。左側の前記二点及び右側の第五部材15と第六部材16とで基板Wを左右方向に挟むと共に、この左右方向に挟む動作の間に、基板Wを第四部材14及び第八部材18で、左右方向基準線Y0を中心として前後方向に挟む。
(もっと読む)
基板支持装置、基板処理装置、基板支持方法、基板支持装置の制御プログラム及び記録媒体
【課題】パレット保持の信頼性及び動作の信頼性を確保し、生産性を向上する。
【解決手段】基板支持装置が、基板12を搭載するパレット8と、パレットを鉛直姿勢した状態で、パレットの径方向両端部を保持するパレット両端保持機構15と、パレットの中心部を回転可能に保持するパレット中央保持機構13と、装置本体を移動する移動機構11と、を備え、パレット両端保持機構は、パレットの径方向両端部を板厚方向の両側から把持する機構で、移動中はパレット両端保持機構がパレットを保持し、パレット両端保持機構からパレット中央保持機構への受け渡し時は、双方の保持機構によってパレットが保持され、基板処理時はパレット中央保持機構によってパレットの中心部を回転可能に保持し、パレット両端保持機構による保持は解除される。
(もっと読む)
デチャック時における電位スパイクを抑制する方法及び装置
【解決手段】プラズマ処理チャンバーの基板デチャックシステムは、基板のデチャック時に、電位スパイクを減少させて、基板をESC(静電チャック)から取り外せるように構成される。 (もっと読む)
ステージ装置
【課題】構造が簡単で、エネルギーを供給の必要が無く、部品劣化が発生しない自重支持装置を有するステージ装置を提供する。
【解決手段】テーブル1と、前記テーブル1を移動させる駆動部6と、テーブルの自重を重力に抗して支持する自重支持装置と、を備えるステージ装置であって、自重支持装置は、軸方向に着磁され、両先端に磁極を有する柱形状からなる第一の永久磁石7と、貫通穴9を有し、前記貫通穴9の軸方向と平行で且つ略一様な磁場が、前記貫通穴9内部の一定範囲において発生するように着磁された第二の永久磁石8とからなり、前記第一の永久磁石7の一方の先端が、前記第二の永久磁石8に形成された前記貫通穴9に非接触で挿入され、前記第一の永久磁石7の他方の先端が、前記第二の永久磁石8に形成された前記貫通穴9の外部に位置するよう配置され、前記第一の永久磁石7と前記第二の永久磁石8との間に発生する磁力を、支持力として利用する。
(もっと読む)
真空処理装置
【課題】ケーブル類からのガスの発生の問題をなくし、また、可動性のケーブルダクト等の複雑な構造を採用することなく、真空室内の駆動源に電力を供給することができる真空処理装置を提供すること。
【解決手段】電力供給機構2は、隔壁11の側面114に配置されている。電力供給機構2は非接触型のものであり、隔壁11の外側に配置された1次側電磁石21と、隔壁11内に配置された2次側電磁石22とを有する。電力供給機構2は、1次側電磁石21から電磁誘導により発生する磁場を用いて2次側電磁石22に電力及び通信信号を供給する。コントローラボックス9内の制御器93は、2次側電磁石22が1次側電磁石21から受けた磁場により得られる高周波電力を整流し、また、その高周波電力から通信信号を検出する。これにより、制御器93は、この電力を用いて通信信号を搬送ロボット10の駆動部へ送信することで搬送ロボット10を駆動する。
(もっと読む)
真空搬送装置
【課題】静電浮上モータを用いた真空搬送装置において、大きな静電吸引力を得ることができ、高重量物を搬送可能な真空搬送装置を提供する。
【解決手段】移載装置5を支持台3の下面側に支持することによって支持台3の上面全体を真空雰囲気中に露出させることが可能になり、これに伴い真空室1の天板部17aの内面に、支持台3の上面全体に対応して平板電極7を配置することが可能になる。これにより、電極面積を広くとることが可能となり、従来の典型的な真空搬送装置に比較して、大きな静電吸引力を得ることができ、高重量物を搬送可能な真空搬送装置を提供する。
(もっと読む)
移動体駆動方法及び装置、露光方法及び装置、パターン形成方法及び装置、並びにデバイス製造方法
【課題】移動体に設けられた計測面への位置計測センサの計測ビームの投射を制御することにより、計測面の歪みを回避する。
【解決手段】所定平面内を移動するステージWSTの位置を計測するために、ヘッドユニット62A〜62Fが設置されている。ヘッドユニット62A〜62Fは、それぞれ、複数のエンコーダヘッド等を備えている。各エンコーダヘッドから、計測ビームが、ステージWSTの上面に設けられているスケール39Y1、39Y2、39X1、39X2に投射される。ここで、長時間、同一位置に計測ビームが投射され続けると、スケール39Y1、39Y2、39X1、39X2に照射熱に起因する変形が生じ、エンコーダ(位置計測センサ)の計測誤差が発生する。そこで、計測ビームを、切る、間欠投射する、或いは強度を変えて投射することにより、その投射量を制御することで、スケールの変形を抑制する。
(もっと読む)
非接触搬送装置
【課題】部品点数を削減して装置の小型化を図り、非接触で搬送物の搬送する。
【解決手段】搬送物Sを上方に浮揚させる静圧テーブルと、振動板11A,11B及びアクチュエータ12A,12Bを有する一対の搬送ユニット10A,10Bと、搬送ユニット10A,10Bを搬送方向に移動させる移動装置とを備える。そして、アクチュエータ12A,12Bによって振動板11A,11Bに撓み定在波を励振させることにより、振動板11A,11Bに対向する搬送物Sの先端部Sa及び後端部Sbに保持力が付与される。そして、保持力を搬送物Sの端部Sa,Sbに付与した状態で、搬送ユニット10A,10Bを移動させることにより、搬送物Sを搬送ユニット10A,10Bの移動に追従して搬送方向に搬送する。
(もっと読む)
載置台構造及び処理装置
【課題】ろう付け部分に剥離等の断線が生ずることを抑制することが可能な載置台構造を提供する。
【解決手段】処理装置20の処理容器22内に設けられて被処理体Wを載置するための載置台構造において、平面方向に延びる1又は複数の導電部材62が内部に設けられた誘電体よりなる載置台60と、処理容器の底部より起立されて上端部に載置台を支持する円筒体状の支柱56と、載置台の下面側に設けられた端子収容凹部と、導電部材に導通されると共に端子収容凹部内に露出されている上部端子と、支柱内に挿通される給電棒86A〜86Dと、給電棒の上端に設けられ、前記端子収容凹部内に嵌合されると共に前記上部端子にろう付けされて給電棒の引っ張り方向に対して前記端子収容凹部に係合される下部端子88A〜88Dを備えた。
(もっと読む)
基板把持装置およびそれを備えた基板搬送ロボット、半導体製造装置
【課題】ハンド全体の厚みを薄くし、小型・軽量化した基板把持装置を提供する。
【解決手段】基端側から先端側へ二股に分かれるベースプレート11と、ベースプレート11の上面に設けられる把持プレート12と、ベースプレート11と把持プレート12の間に設けられる把持駆動部7と、前記二股の基端の先端と把持プレート12の先端とから成る把持部10と、前記二股の各先端で基板の一部を案内するガイド部20と、を備え、把持駆動部7が、把持プレート12の基端側にて基端側を常に上側へ付勢する付勢手段15と、付勢手段15の近傍で通電により把持プレート12をベースプレート11側に吸着させる電磁石部14と、先端側にあって把持プレート12がベースプレート11に対して上下に揺動させる軸受部13と、で構成し、ガイド部20が基板の一部の周囲の表面と裏面と側面とに当接することのできる案内溝23を先端に備えた。
(もっと読む)
超音波を利用した平板状物体の非接触支持方法及び装置
【課題】平板状物体を支持機構の下側で非接触支持することができ、また、支持機構と平板状物体との位置ずれを自動的に補正することができる平板状物体の非接触支持方法を提供する。
【解決手段】空気中において、超音波で励振される平坦な振動面26の鉛直下方に、振動面26の外形と略等しい外形の平坦面を有する平板状物体30を、当該平坦面が振動面26に平行するように配置し、振動面26を超音波で面に垂直方向に励振して、振動面26の近接位置に平板状物体30を非接触状態で支持する。振動面26の超音波振動により平板状物体30に引力が働き、振動面26の鉛直下方で平板状物体30が非接触状態で支持される。振動面26と平板状物体30との中心位置がずれていても平板状物体30に復元力が作用し、ずれが自動的に解消される。
(もっと読む)
ステージ装置
【課題】ピッチングを発生させることなく移動体を移動させることのできるステージ装置を提供することを目的とする。
【解決手段】X軸方向に沿って複数の磁石を配設することによって形成されて一対のY軸可動子9A,9B同士に連結されたX軸シャフト18A,18B、及びX軸シャフト18A,18Bを取り囲むコイルによって構成されるX軸可動子19A,19Bを有するX軸駆動部6をX軸移動体7の両外側に各々配置することによって、X軸移動体7の鉛直方向の位置を調整可能とする。そして、X軸移動体7の鉛直方向の位置を下げることで、X軸シャフト18A,18B及びY軸可動子19A,19Bを有するY軸駆動部6にX軸移動体7の鉛直方向の重心位置Gを近づける。これによって、X軸駆動部6でX軸移動体7を安定して支持する。
(もっと読む)
1 - 20 / 68
[ Back to top ]