
Fターム[5F046FA17]の内容
半導体の露光(電子、イオン線露光を除く) (57,085) | 位置合わせマークの光学的検出 (623) | 顕微鏡、目視 (55)
Fターム[5F046FA17]に分類される特許
1 - 20 / 55
コンタクト露光方法および装置
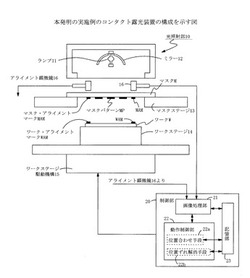
【課題】コンタクト露光のマスクとワークの位置合せにおいて、位置合わせを何度繰り返しても位置ずれが解消せず、アライメントが収束しないというエラーの発生を防ぐこと。
【解決手段】マスクMとワークWを接触させて、マスク・アライメントマークMAMとワーク・アライメントマークWAMの位置を検出し第1のアライメント量を求める。ついで、マスクMとワークWを離間し、第1のアライメント量に基づいてマスクMとワークWの位置合わせを行い、マスクMとワークWを接触させて、マスクマークMAMとワークマークWAMの位置を検出し第2のアライメント量を求める。第1、第2のアライメント量が、あらかじめ設定した範囲内で一致する場合は、第2のアライメント量をイメージシフト量として記憶し、再度マスクMとワークWを離間し、第2のアライメント量にイメージシフト量を加えて、アライメント量を求めマスクとワークの位置合わせを行う。
(もっと読む)
マイクロレンズ露光装置

【課題】マイクロレンズアレイとマスクが所定間隔をおいて固定された露光装置において、マイクロレンズアレイと露光用基板との間のギャップを容易に高精度でマイクロレンズの合焦点位置に調整することができるマイクロレンズ露光装置を提供する。
【解決手段】露光用のレーザ光はマイクロレンズアレイ3のマイクロレンズ3aによりレジスト膜2上に照射される。顕微鏡10からの光は、マスク4のCr膜5の孔5bを通過し、マイクロレンズ3bを透過してレジスト膜2上に照射される。このマイクロレンズ3bを透過した光がレジスト膜2上で合焦点か否かを顕微鏡10で観察することにより、マイクロレンズ3aによりレジスト膜2に収束される露光光の合焦点を判別できる。
(もっと読む)
半導体装置の製造方法、レチクル及び半導体基板
【課題】レチクルの特定半導体素子パターンが露光された転写パターンを検査する際に、レチクルの半導体素子パターンが多数ある場合でも、半導体基板上で特定半導体素子パターンを容易且つ正確に短時間で探し当てることを可能とし、極めて効率良く検査を行う。
【解決手段】複数の半導体素子パターン12と、半導体素子パターン12から、複数の半導体素子パターン12のうちの少なくとも1つであって観察対象とされる特定半導体素子パターン12Aまでの方向及び距離を示す識別用パターン13とを有するレチクル11を用いて、半導体基板上のフォト・レジストに露光し、識別用パターン13の転写パターンを用いて、特定半導体素子パターン12Aの転写パターンの検査を行う。
(もっと読む)
基板位置決め方法
【課題】 基板のステージ載置後の相対位置を求めて簡単に精密な位置決めを行う。
【解決手段】 基板位置決め装置は、ステージ5とステージ移動機構51とカメラ6より構成され、カメラ6に基板Wの表面が撮像される。低倍率でアライメントマーク204を撮像した基板回転中心位置情報を用いるセンタリング処理によって基板Wの回転中心位置を位置補正する。次に、ステップS18において、低倍率で撮像したアライメントマーク205とスクライブライン領域203を用いた基板端部位置情報から基板Wの位置を計測し、その計測結果に基づいてステップS20において基板Wの回転角度補正を行う。つづいて、ステップS21において傾斜角度補正を行う。そして、ステップS22において、セットされた高倍率にてアライメントマーク204を撮像し、アライメントマーク204の重心位置を計算して基板の位置を補正して、基板の位置決めを行う。
(もっと読む)
ワークアライメントマークの検出方法および露光装置
【課題】ワークに形成されたパターンの画像のコントラストが低い場合であっても、ワークマークを誤検出なく確実に検出できるようにすること。
【解決手段】アライメント顕微鏡10は例えば3倍の倍率と10倍の倍率に切り替えが可能であり、ワークW上には、ワークマークWAMと、ワークマークWAMよりコントラストが高く見えやすいワークマークWAMに対して所定の相対位置にある探索マークが設けられている。まず、アライメント顕微鏡を3倍の倍率にして、ワーク上に形成された上記探索マークを検出する。探索マークが検出されたら、ワークマークWAMが10倍の倍率のアライメント顕微鏡10の視野に入るようにワークステージWSを移動させ、10倍の倍率でワークマークWAMを検出する。これにより、ワークマークを確実に検出することができ、マスクとワークの位置合わせを行なうことができる。
(もっと読む)
露光装置
【課題】マスク・アライメントマークとワーク・アライメントマークとにより位置合わせを行う露光装置において、ワークステージに形成した貫通孔部分でワークに生じる局所的な温度上昇を防止した構造を提案することである。
【解決手段】ワークステージに形成した貫通孔を介してマスク・アライメントマークとワーク・アライメントマークを検出する露光装置において、ワークステージの貫通孔内に配置した光透過性窓部材を弾性体によって支持して、ワークに対して窓部材が弾性的に当接することを特徴とする。
(もっと読む)
照明装置、露光装置、位置決め装置および貼合装置
【課題】観察画像のコントラストを高くする。
【解決手段】顕微鏡で観察する被観察物を照明する照明装置であって、互いに波長の異なる複数の単波長光源と、照明された被観察物を観察した観察像のコントラストの大きさを検出するコントラスト検出部と、コントラスト検出部により検出されたコントラストに応じて、複数の単波長光源の強度比を設定する強度比設定部とを備える。上記照明装置は、強度比を変化させながら被観察物を照明した場合に、コントラスト検出部が検出したコントラストの大きさを監視して、前記コントラストがより大きくなる強度比を決定する強度比決定部を更に備えてもよい。
(もっと読む)
顕微鏡用照明光学系、及び顕微鏡
【課題】使用頻度の高い倍率間での倍率変換において照明光学系の操作を不要とした照明光学系及び顕微鏡を提供する。
【解決手段】光源2側から順に、コレクタレンズ3と、視野絞り4と、正のパワーを有するフィールドレンズ5と、開口絞り6と、正のパワーを有する集光レンズ7とを、視野絞り4から標本面8の間がおよそ両側テレセントリックな光学系として配置し、さらに、DFSは視野絞り4の直径、βは標本面8から視野絞り4までの倍率、NAは照明光学系の標本面8側の開口数とするとき、以下の条件式を満たして配置する。15≧DFS/β≧9・・・(1)0.85≧NA≧0.5・・・(2)
(もっと読む)
マスクレス露光装置およびマスクレス露光方法
【課題】 本発明は、MEMS、半導体等の製造に用いるマスクレス露光装置およびマスクレス露光方法に関し、投影パターンの大きさに応じて投影倍率を可変にした場合であっても精度よく投影パターンを形成することを目的とする。
【解決手段】 基板を支持するステージと、前記基板に投影する所望の投影パターンを外部信号の入力により生成する空間光変調部と、対物レンズを備え前記投影パターンを前記基板に投影する投影光学系と、前記対物レンズを介して前記基板に形成された位置合わせマークを検出する観察光学系とを有するマスクレス露光装置であって、前記投影光学系は、投影倍率を変更可能に前記対物レンズが構成されてなるとともに、前記投影倍率を変更する毎に、前記位置合わせマークを予め設定した指標又は予め特定した前記投影パターンの中心位置に対して位置合わせする機構を有することを特徴とする。
(もっと読む)
露光装置、位置検出方法、及びデバイス製造方法
【課題】ウエハ処理によってダメージを受け、目標とするマークが検出できない場合もしくは、計測ができなくなった場合でも正確にアライメントを実施する。
【解決手段】基板の各ショットごとに配列された複数の位置検出マークの中からターゲットマークを検出して基板の位置合わせを行う露光装置であって、スコープにより第1の倍率で撮像された画像から、複数の位置検出マークの中の第1のマークの位置と当該第1のマークの外側の領域の特徴とを抽出して第1のマークを識別し、スコープにより第2の倍率で撮像された画像から、ターゲットマークの位置を抽出し、抽出されたターゲットマークの位置の信頼性が閾値を下回る場合、新たなターゲットマークとして複数の位置検出マークから第2のマークを選択し、第2の倍率で撮像された画像から第2のマークの位置を抽出する演算処理部と、第2のマークの位置に基づきステージの位置を制御する制御部と、を有する。
(もっと読む)
重ね合わせずれ量算出方法及び半導体装置の製造方法
【課題】TISの平均値以外の重ね合わせ測定精度に関わる指標も考慮し、総合的に最適な焦点位置を決定できる重ね合わせずれ量算出方法を提供する。
【解決手段】重ね合わせずれ量の相関係数、基板面内のTISの3σ、繰り返し測定再現性を考慮し、(焦点位置決定値)=−(相関係数)+(基板面内TISバラツキ)+(繰り返し測定再現性)と、上記焦点位置決定値を定義する。この焦点位置決定値を測定マークに対する光学顕微鏡の最適な焦点位置決定指標として用いる。この焦点位置決定値が最小となる焦点位置を最適な焦点位置と決定し、その最適焦点位置における基板面内のTISの平均値を個々の重ね合わせずれ量に対して補正を行う。
(もっと読む)
露光装置およびデバイス製造方法
【課題】
基板ステージの移動誤差を短時間で計測する露光装置を提供する。
【解決手段】
基板を保持して移動されるステージと、前記ステージに保持された基板上のマークを撮像するスコープと、を有し、前記ステージに保持された基板を露光する露光装置であって、移動される前記基板ステージ上の計測用基板に配列された複数の第1マークを前記スコープに順次撮像させることにより、前記スコープを基準として前記複数の第1マークそれぞれの位置および回転量を算出し、算出された前記複数の第1のマークそれぞれの位置および回転量と、予め計測された前記複数の第1マークそれぞれの位置および回転量とに基づいて、前記基板ステージの移動誤差を算出する処理部と、を有することを特徴とする。
(もっと読む)
空間位相フィーチャ・ロケーション
基板上のアラインメント・マークを突き止める方法を説明する。一般に、基板は、基板アラインメント・マークに隣接する1つまたは複数のロケータ・マークを含む。ロケータ・マークは、減らされた大きさの相対変位を伴ってリソグラフィ・システム内で基板をテンプレートと位置合わせするのに基板アラインメント・マークを使用できるように、基板アラインメント・マークの相対ロケーションを提供する。 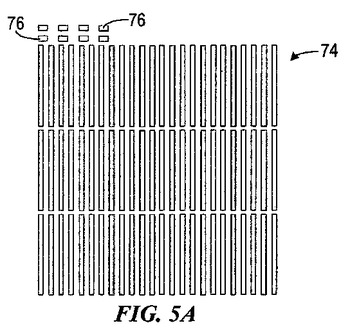 (もっと読む)
(もっと読む)
マーク位置検出方法および装置
【課題】露光装置において、デバイス製造現場で発生するWISを高精度に補正するアライメント方法を提供する。
【解決手段】マーク信号の特徴を定量的に表した複数のマーク特徴量を算出し、各マーク特徴量からWIS予測量を算出してアライメント結果を補正する。各マーク特徴量からWIS予測量を算出するための変換係数は、デバイス製造現場で実施する重ね合わせ検査の結果を露光装置へ入力することで更新する。これにより、デバイス製造プロセスが変化するような状況においても、WISを除去した高精度なアライメントを行うことが可能となる。また、各ショットのマーク特徴量を統計計算して「マーク特徴量のショット配列成分」を算出し、重ね合わせ検査の結果より更新した「各ショット配列成分の変換係数」を用いて、「ショット配列補正値のWIS予測量」を算出し、アライメント時のショット配列補正値を補正する。
(もっと読む)
基準位置計測装置及び方法、並びに描画装置
【課題】校正用基板を用いることなく、高精度な歪み補正データを作成する。
【解決手段】カメラの撮影領域に比して小さな移動ステップで、撮影光軸に略垂直なXY方向に基板を微動させるXY微動部を移動ステージに設け、移動ステージのXY位置を検出するX方向センサ及びY方向センサを設ける。XY微動部を駆動することにより、移動ステージに載置された基板上の基準マークMを撮像領域の中心位置からΔx,Δyずつ移動させ、各位置にて基準マークMの撮影を行うとともに、XY位置の検出を行う。撮影画像中における基準マークM′の移動ベクトルと、それに対するステージ移動ベクトルとの差分により補正ベクトルHを算出する。そして、補間処理により撮影領域の全位置について補正ベクトルHを算出し、歪み補正データを作成する。
(もっと読む)
投影露光装置
【課題】 投影露光装置の投影光学系の波面収差を投影露光装置上で直接測定可能と
する露光装置を実現すること。
【解決手段】 第1物体のパターンを第2物体上に投影する投影光学系と、
前記投影光学系の光学特性を測定する干渉計と、を備え、
前記干渉計は、光源からの光を前記第1物体側又は第2物体側から前記投影光学系に導く対物レンズを有し、
前記対物レンズは、前記干渉計の他のレンズとは独立して、前記第1物体のパターンが位置する面に沿って移動可能であること。
(もっと読む)
情報処理装置及び露光装置
【課題】計測精度と計測時間とが設定された要求を満たすサンプルショットセットを決定する。
【解決手段】本発明は、基板に形成された複数のショットのそれぞれを露光する装置において計測の対象となるサンプルショットセットを決定する情報処理装置であって、入出力部と処理部とを備える。処理部は、入出力部から入力された複数のショットの配列に関する情報に基づき、複数のショットから複数のサンプルショットセットを生成する。処理部は、また、複数のサンプルショットセットの中から計測精度と計測時間とが設定された要求を満たすサンプルショットセットを決定する。
(もっと読む)
フォトレジストパターン形成方法、マスクパターン形成方法、半導体結晶の成長方法、半導体基板の製造方法、および半導体基板
【課題】コストを低減するとともに、基板の不良領域の分布に関わらず、基板の不良領域上に容易にフォトレジストパターンを形成することのできるフォトレジストパターン形成方法を提供する。
【解決手段】フォトレジストパターン形成方法は、まず、基板10を準備する。そして、基板10の表面10a上にマスク層20を形成する。そして、マスク層20上にフォトレジスト30を形成する。そして、フォトレジスト30に感光しない波長を有する第1の光源と、フォトレジスト30に感光する波長を有する第2の光源とを有する光学顕微鏡を準備する。そして、第1の光源を用いて、フォトレジスト30を介して基板10の不良領域11を検出する。そして、検出する工程で不良領域11が検出されると、第2の光源に切り替えて不良領域11上のフォトレジスト30を感光させる。そして、感光させる工程で感光されていない領域のフォトレジスト30を除去して、フォトレジストパターン31を形成する。
(もっと読む)
リソグラフィを実行するための方法及びシステム、物体を互いに位置合わせする方法、並びに非マーキング位置合わせ特徴を有するナノインプリント用モールド
リソグラフィを実行する方法は、リソグラフィツール50の一部及び基板10の一部の画像60と、更なるリソグラフィツール30の一部及び基板10の一部のさらなる画像(28)を用いて、リソグラフィツール50のための変位ベクトル74を計算することを含む。物体を位置合わせする方法は、第1の物体10に近接して第2の物体30を位置決めすること、及び第2の物体30の表面上の特徴32及び第1の物体10の表面上の特徴18を図示する第1の画像38を取得することを含む。更なる物体50が第1の物体10に近接して位置決めされるときに、更なる物体50の表面上の特徴52及び第1の物体10の表面上の特徴18を図示する更なる画像60が取得される。更なる画像60は第1の画像38と比較される。インプリントモールド30、50は、インプリントモールド30、50のインプリント表面上に少なくとも1つの非マーキング基準特徴32、52を含む。  (もっと読む)
(もっと読む)
マーク位置計測装置、露光装置、マーク位置計測方法、及びマイクロデバイスの製造方法
【課題】 アライメントマークの計測の高速度化を図りつつ、マーク位置を高精度に計測できるようにする。
【解決手段】 ウエハWを載置して移動するウエハステージWSと、ウエハステージWS上に載置されたウエハWに形成されたアライメントマークAM1〜9を検出するアライメントセンサAS1〜3と、アライメントマークAM1〜9をアライメントセンサAS1〜3で検出する際のウエハステージWSの移動方向であるY方向に沿って、ウエハステージWS上に配列的に設けられた複数のステージマークSM1R〜SM9R,SM1L〜SM9Lと、アライメントセンサAS1〜3がウエハマークAM1〜9を検出しているときに、ステージマークSM1R〜SM9R,SM1L〜SM9Lを検出するステージマークセンサSS1〜2と、これらセンサAS1〜3,SS1〜2の検出結果に基づいて、アライメントマークAM1〜9の位置を求める制御装置FIAUとを備えて構成される。
(もっと読む)
1 - 20 / 55
[ Back to top ]