
Fターム[5H004GA15]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 制御対象の特性変動対策 (107) | 環境変化によるもの (23)
Fターム[5H004GA15]に分類される特許
1 - 20 / 23
移動制御装置及び移動制御方法、並びにコンピューター・プログラム
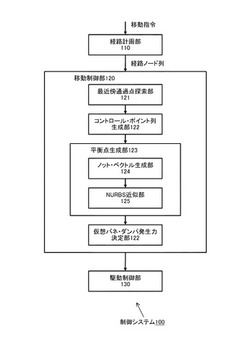
【課題】マニピュレーターのリーチング動作や移動ロボットの移動など、自動機械の移動を好適に制御する。
【解決手段】自動機械の現在位置及び最終目標位置をパラメトリック曲線の端末とみなし、これら2点を結ぶパラメトリック曲線を内分比r:1−rで内分する内分点を、仮想バネ・ダンパ系の平衡点、すなわち仮目標位置として算出する。そして、この仮目標位置を2次のフィルターで鈍らせ、目標位置xdの生成を行なう。複雑な経路への追従制御が実現されるとともに、ベースとなるオンライン目標位置整形の特徴である対外乱適応能力を両立した移動制御器を構成できる。
(もっと読む)
制御装置およびチューニング方法

【課題】大幅なコストの増加を伴うことなく、適切なチューニングを実現できるようにする。
【解決手段】制御装置1では、チューニングツール120からの開始指令を受けて、高速にアクセス可能な第2メモリ20に制御パラメータが記憶され、この制御パラメータが制御対象の制御時に参照されるようになる。そうすると、開始指令から終了指令までの間に実施されるチューニングでは、第2メモリ20の制御パラメータで示される具体的な値が順次変更されながら、各値について制御対象が制御され、その制御結果に応じて最適な制御パラメータが確定されていくことになる。さらに、このチューニングが実施されている間、第2メモリ20における制御パラメータへのアクセスは、そのアクセスに要する時間と、第1メモリにおける制御パラメータへのアクセスに要する時間と、の時間差に応じて遅延されるようになる。
(もっと読む)
需要予測装置、需要予測方法及び需要予測プログラム
【課題】環境条件を考慮した需要予測において、環境条件の変化に応じた高精度な需要予測を実現すること
【解決手段】プラントの制御システムにおける需要予測装置であって、需要予測の更新要求に基づき、トレンドDBA9から、予測トレンド候補B6を抽出する現在値比較部A2と、予測トレンド候補B6から予測トレンドB7を選択するトレンドデータ比較部A3とを含み、現在値比較部A2若しくはトレンドデータ比較部A3は、選択されている予測トレンドB7と現在トレンドB3との差が大きくなることを認識して更新要求を発信することを特徴とする。
(もっと読む)
オンラインモデル同定を用いたモデル予測制御方法および装置
【課題】操業条件の変更ならびにプロセス特性の変化に対しても制御性能を維持できる、オンラインモデル同定を用いたモデル予測制御方法および装置を提供することを目的とする。
【解決手段】プロセス動的モデルを用いて将来の挙動を予測し最適な制御を行う、オンラインモデル同定を用いたモデル予測制御方法であって、モデル予測制御演算実施にあたっては、用いるプロセス動的モデルを実操業データに基づいてモデル再同定を毎回行う。
(もっと読む)
流体フロー測定および比例流体フロー制御デバイス
【課題】制限フロー構成要素によって生成される圧力低下に基づいて、フロー速度を測定するための流体フロー測定および制御デバイスを提供する。
【解決手段】本発明のデバイスは、流体入り口および流体出口を有する比例フローバルブ10、ならびにこの比例バルブ10を調節するためのアクチュエータ17を備える。この制限フロー要素15は、この比例フローバルブ10と連絡状態にある流体入り口および流体出口を備え、制限フロー構成要素の流体入り口と出口との間での圧力低下を生成する。このデバイスはまた、圧力低下を測定するための手段24,25、圧力低下に基づいてフロー速度を計算するための手段16、ならびに測定された圧力低下に応じて比例フローバルブ10を通じて流体のフローを制御するために圧力低下測定手段24,25、およびアクチュエータ17と連絡する制御手段(示さず)を備える。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
制御装置および制御方法
【課題】操作量総和を操作量総和下限値以上の値に維持しつつ、制御の限界を改善する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2の総和MV_allを算出する操作量総和算出部31−1,31−2と、操作量総和MV_allが予め規定された操作量総和下限値に到達してこの下限値以下になったときに、操作量MV1,MV2を、到達が生じた時点の操作量MV1,MV2に基づく値に固定する操作量固定部32−1,32−2とを備える。
(もっと読む)
車両用空調装置、車両用空調装置の制御方法および制御装置
【課題】特定状況に対応する所定の設定操作を行う推薦確率を算出する確率モデルの構築に用いた複数の学習データのうち、その特定状況に関する学習データのみを削除し、残りの学習データを別の学習に利用できる車両用空調装置およびその制御方法を提供する。
【解決手段】車両用空調装置(1)は、複数の状態情報をそれぞれ学習データとして記憶する記憶部(61)と、確率モデルを構築する学習部(66)と、算出した推薦確率に応じて、乗員の設定操作に関連する設定情報等を、所定の設定操作となるように修正する(64)と、修正された設定情報等にしたがって空調制御を行う空調制御部(65)とを有する。学習部(66)は、複数の学習データを用いて確率モデルを構築する確率モデル構築手段(663)と、構築された確率モデルに学習データを入力し、得られた推薦確率が第1の閾値以上のとき、その学習データを削除する学習情報整理部(666)を有する。
(もっと読む)
制御方法及び制御装置
【課題】モータを高効率に駆動するために好適な制御方法を提供すること。
【解決手段】印刷装置は、記録ヘッドを搭載したキャリッジを、主走査方向に往復運動させ、キャリッジの往復運動に合わせて、用紙を挟持するローラをLFモータにより駆動して、用紙を所定量ずつ送り出し、用紙に画像を形成する。この装置のLFモータ制御部35は、用紙位置y(t)を検出する位置検出部351と、LFモータへの操作量u(t)を算出する操作量演算部353と、操作量u(t)の演算に用いるパラメータθiを、用紙位置y(t)に基づき補正するパラメータ更新部355と、を備える。また、操作量演算部353は、最大速度V及び加速時間Tで定められる目標位置r(t)に基づき、操作量u(t)を算出する。
(もっと読む)
プラント制御装置
【課題】 操作信号を変更する効果およびこの効果が得られる物理的理由を短時間で分析し、これらの分析結果を画面表示可能なプラント制御装置を提供する。
【解決手段】 計測信号DB210と、操作信号DB250と、数値解析実行手段220と、数値解析結果DB240と、操作信号に対する計測信号の値を推定するモデル230と、モデル230を用いる学習手段260と、学習情報DB270と、操作信号生成手段280で用いる情報の制御ロジックDB290と、プラント運転特性の知識DB400と、知識DB400と学習情報DB270と操作信号DB250と計測信号DB210の情報により数値解析結果DB240の情報を処理する分析手段300とを備え、分析手段300は、操作方法の妥当性の学習根拠分析手段310と、操作信号がプラントに与える効果と異常な計測信号の有無を評価する信号分析手段320と、知識DB400の情報を修正する知識DB更新手段330との少なくとも1つを含む。
(もっと読む)
柔軟アームを有する移動ロボット
【課題】柔軟アームを有する移動ロボットにおいて、柔軟アームの振動および姿勢を、走行路面の環境に左右されることなく、安定的にかつ有効に制御すること。
【解決手段】走行機体およびブーム104にセンサ110〜116を取り付けて最小限の状態変数を計測し、計測できない状態変数はオブザーバによって推定して、ブーム104の姿勢および振動を状態フィードバック制御する。また、フィードバック制御に加えて、目標値変動補償用のフィードフォワード制御および外力軽減用のフィードフォワード制御を併用する。
(もっと読む)
リニアソレノイドの電流制御装置
【課題】リニアソレノイドの電流制御装置において、工数やコストをかけずに機差バラツキ及び特性変動を補償する。
【解決手段】リニアソレノイドの電流をフィードバック制御する際、規範モデルからリニアソレノイドの時定数を考慮した理想出力値を算出する。この理想出力値と電流センサで検知した実出力値との差から同定誤差を算出し、この値が0になるよう適応機構に基づき制御定数を決定する。決定した制御定数をフィードバック演算に使用することで、電源電圧や環境温度がどのような状態においても一定の応答性を実現し、さらに、機差バラツキを補償する。
(もっと読む)
異常監視装置
【課題】対象信号の特徴量が時間の経過に伴って変化する機器に用いても正常・異常について誤判定を生じない異常監視装置を提供する。
【解決手段】機器Xから生じる音および振動をセンサ部2で検出し、センサ部2から出力される対象信号から特徴抽出部3において特徴量を抽出する。2台のニューラルネット1a,1bには、特徴抽出部3で抽出した特徴量が入力される。一方のニューラルネット1a,1bは検査モードで動作し、特徴量のカテゴリを分類する。他方のニューラルネット1a,1bは学習モードで動作し、特徴量を学習データに用いて学習する。切換判定部4は、検査モードで動作するニューラルネット1a,1bについて判定結果の信頼性を評価し、判定結果の信頼性が低下すると、両ニューラルネット1a,1bの動作の入れ替えを行う。
(もっと読む)
状態判定装置および状態判定方法
【課題】不可測な外的要因に依存して操作量の平衡点が移動する可能性のある制御対象に対しても適切な状態判定を行う。
【解決手段】状態判定装置は、制御量PVと操作量MVの時系列データについてステップ応答前半の過渡状態のデータを特定する過渡状態データ特定部3と、制御量PVと操作量MVの時系列データのうちの過渡状態のデータにより制御対象のモデル数式を同定する制御対象モデリング部4と、モデル数式に基づいて動的プロセスゲインとプロセス時定数との比率を算出するゲイン時定数比算出部5と、制御対象が特定の状態にある場合の比率の数値範囲を示す判定基準を予め記憶する判定基準記憶部6と、比率と判定基準とを比較して、制御対象の状態が特定の状態にあるか否かを判定する状態判定部7とを有する。
(もっと読む)
流量予測装置、流量予測方法および流量予測プログラム
【課題】雨量または流量に関するデータの偏りに対応しつつ、予測精度を向上させるとともに、学習時間を低減させる。
【解決手段】データ加工機能104は、保存機能103から読み出した予報雨量データ、実績雨量データまたは実績流量データなどを予測モデル構築用の学習データに加工し、平均雨量、流量または流量変化分が一定値以下のデータを予測モデル構築用データから削除し、平均雨量、流量または流量変化分が一定値以上のデータを複数倍し、予測モデル構築手段105は、この予測モデル構築用データに基づいて予測モデルを構築し、予測機能106は、予測モデル構築手段105にて構築された予測モデルおよびデータ加工機能104にて生成された予測モデル構築用データに基づいて、将来の所定時間における河川などの流量を予測する。
(もっと読む)
PID制御装置および制御パラメータ更新方法
【課題】PID制御のための制御パラメータとして、個々に最適な値を設定すること。
【解決手段】PID制御装置1の生成手段42は、所定の周波数で変化する信号あるいはデータを生成する。加算手段43は、生成手段42が生成した信号あるいはデータを、目標値に基づくPID制御信号あるいはPID制御データに加算し、PID制御対象21などへ供給する。更新手段41は、PID制御対象21などによる動作の検出信号あるいはデータに含まれる、所定の周波数で変化する信号あるいはデータに基づく変化量に応じてPID制御信号を生成するための制御パラメータ36を更新する。
(もっと読む)
火力発電プラントの起動スケジュール管理方法
【課題】 各系列の軸台数スケジュールを決めるには各起動モード毎に概略の時間表はあるが、各種条件により起動所要時間は大幅に変わってくるので、実際に系列制御用計算機に起動開始時刻を入力して時間の把握をしていた。そのために実際に発電プラントに起動スケジュールが登録され、登録の解除を忘れると起動操作が進行する恐れがある問題点があった。
【解決手段】 複数軸の発電ユニットを有する火力発電プラントにおいて、予め起動操作工程ごとに所要時間を計算するプログラムを用意し、該プログラムに従ってパソコン上に起動操作開始時刻から各起動操作工程の予想時間を算出し、各軸の運転のシミュレーションを行い、その後系列制御計算機に起動開始時刻を入力して登録して実際の起動操作を行うことを特徴とする。
(もっと読む)
エージェント学習装置、エージェント学習方法及びエージェント学習プログラム
【課題】 連続時間及び連続状態を取り扱うことができるとともに、環境から自律的且つ高速に学習を行うことができるエージェント学習装置を提供する。
【解決手段】 内部状態推定器201は、環境50からの観測変数yを観測し、責任信号推定器202は、当該観測変数yから推定された環境50の状態に基づいて責任信号を算出し、行動選択器101は、責任信号等を基に状態I及び行動Jを選択し、下位報酬関数選択器102は、選択された状態I及び行動Jに対応する下位報酬関数を制御信号出力器203へ与え、制御信号出力器203は、下位報酬関数を最大にするように環境50への制御出力を決定する。
(もっと読む)
調節計
【課題】 ヒータに電力を供給する電源の電圧が異なる環境下で使用しても同様に制御特性を得られるようにする。
【解決手段】 補正前の操作量と基準状態の基準操作量との比である補正係数を用いて、PIDコントローラからの操作量を補正し、これによって、実運用時の電源電圧が、基準状態の電源電圧とは異なっていても、その影響を解消するように操作量を補正し、基準状態と同様の制御特性になるようにしている。
(もっと読む)
プラント運用制御装置
【課題】 プロセスモデルのパラメータを、季節の変動などによる経年変化やプラント機器の交換などによる対象プラントのプロセス構成の変化に対して適切に調整することができ、このことによりプラント機器に係る流量制御や水質制御等の制御性能を向上させることができるプラント運用制御装置を提供すること。
【解決手段】 プロセス状態計測手段12によりプロセス操作量およびプロセス状態量を計測し、これらのプロセス操作量およびプロセス状態量がプロセス状態記憶手段13に記憶される。ヒューマンインターフェース手段14において、ステップ応答開始時刻T1が入力されるとともにプロセス操作量目標値の設定を行う。モデルパラメータ同定手段15は、ステップ応答開始時刻T1に基づいて、記憶されたプロセス操作量のステップ状の変化からプロセスモデルのモデルパラメータK、T、Lの同定を行う。
(もっと読む)
1 - 20 / 23
[ Back to top ]