
Fターム[5H004GA40]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | その他 (32)
Fターム[5H004GA40]に分類される特許
1 - 20 / 32
制御装置及び制御方法
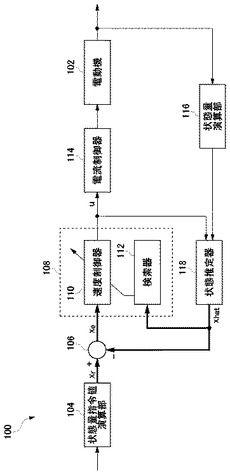
【課題】状態に応じて制御則を切り替えて操作量を演算する制御装置及び制御方法のために演算負荷を低減する手法を提供する。
【解決手段】制御装置100は、状態空間を分割する複数の凸多面体の各々に制御則が対応付けられており、状態ベクトルの属する凸多面体に対応する制御則を使用して操作量を演算する速度制御器110と、状態空間を規則的に区切る複数のメッシュのうち状態ベクトルの属するメッシュに関連する制御則を候補として、状態ベクトルの属する凸多面体に対応する制御則を該候補から決定する検索器112と、を備える。
(もっと読む)
車載動力プラントの制御装置

【課題】車載動力プラントの状態量に課せられた制約条件が満足されるようにリファレンスガバナを用いて目標値を整形するにあたり、状態量の将来の軌道の予測に要する演算負荷を低減する。
【解決手段】車載動力プラントの制御装置はフィードバックコントローラとリファレンスガバナとを備える。フィードバックコントローラは、特定状態量の実値を目標値に近づけるようにフィードバック制御によってアクチュエータの操作量を決定する。リファレンスガバナは、フィードバック制御にかかる閉ループ系の動特性が「むだ時間+2次振動系」でモデル化されたプラントモデルを用いて特定状態量の将来の軌道を予測し、特定状態量に課せられる制約を満足するように目標値を整形する。本制御装置によれば、リファレンスガバナにおける予測長は、プラントモデルにおけるむだ時間と2次振動系の振動周期の半分の時間との合計時間に設定される。
(もっと読む)
モデリング装置および該方法
【課題】本発明は、先験的知識を利用することによって不充分な入出力データであっても、より精度の高いモデルを構築し得るモデリング装置および該方法を提供する。
【解決手段】本発明のモデリング装置Sは、システムのモデルをそのパラメータの値を決定することで構築する装置であって、前記モデルが、連続した時間と見なされる時間変数を含む数式であり、予め得られているシステムに関する先験的情報を制約条件として設定する制約条件入力設定部21および制約条件記憶部41と、所定の入力データを実績入力データとしてシステムに入力した場合に出力された実績出力データと、前記実績入力データをモデルに入力した場合に出力されたモデル出力データとの誤差を評価する評価関数の評価結果を求める評価演算部13と、前記制約条件を満たし、かつ、前記評価結果が最良となるように、前記モデルのパラメータの値を求めるモデル更新決定部14とを備える。
(もっと読む)
学習係数制御装置
【課題】学習係数が制限値を超えても制限値内で学習係数を制御してモデル誤差を修正する学習係数制御装置。
【解決手段】2個以上のモデルに基づき1つの物理量を予測するプロセスモデルについて物理量の予測値と実績値との差に基づき学習演算部10で各々のモデルの学習係数を算出し、一方のモデルの予測値を変更したときに最終的に求められる物理量の予測値が変わらないように他方のモデルの予測値を変更する補正値を得るために必要な変換係数を変換係数演算部14で演算し、一方のモデルの学習係数が第1制限値を超えた場合に学習係数修正値演算部17からのモデルの学習係数の修正値と変換係数平均値演算部19からの変換係数の平均値とに基づき一方のモデルの学習係数を修正したことで発生する予測値の変化量を他方のモデルで補償するモデルの補正値をモデル補正値演算部20で演算する。
(もっと読む)
オートチューニング実行装置および方法
【課題】ATの実行を可能な限り効率化する。
【解決手段】オートチューニング実行装置は、リミットサイクル方式のATを実行するAT実行部1と、干渉関係の存在によりATの同時実行が禁止される制御ループを示す同時実行禁止情報を記憶するインターロック登録部2と、ATを起動すべき制御ループを記憶し、ATの実行が完了した制御ループの登録を削除するAT起動登録部3と、AT起動指示部5から起動を指示された制御ループについて、予め規定された規則に従って同時実行禁止情報を参照して、ATの実行を許可する制御ループを決定し、決定した制御ループのATを起動するようAT実行部1に指示するインターロック実行部4と、AT起動登録部3の登録内容を参照し、AT未実行の制御ループのATの起動を指示するAT起動指示部5とを備えている。
(もっと読む)
プラント制御装置、そのモデル予測制御装置
【課題】制御性能の低下を防ぎつつメモリ使用量を削減する。
【解決手段】行列縮約部12を新たに設ける。行列縮約部12は、2次計画問題定式化部11が生成した行列を縮約し、縮約後の行列をメモリにセットすることで最適化計算部13に渡す。この行列の縮約は、目標値に関する行列は一切削除せず、制約条件に関する行列のみ、その一部を削除することで実現する。
(もっと読む)
プラント制御装置とプラント制御方法
【課題】 実績ある従来のモデル式を活かし、品質管理における信頼性を維持しながら、予測精度を向上させるプラント制御装置を提供する。
【解決手段】 入出力関係を汎化した所定のモデル式を用いて、複数の入力データから出力データRを予測するモデル予測手段101と、モデル予測手段101からの出力データRを近似データR´に補正するGMDH補正手段102と、を備え、GMDH補正手段102は、入力データからGMDH手法を用いて補正値を推定する構成としてある。
(もっと読む)
プロセス制御システムの制御ループタイミングを調整する方法及び装置
【課題】プロセス制御システムの制御ループタイミングを調整する方法及び装置を提供する。
【解決手段】本方法は、プロセス制御システム内の第1のプロセス制御装置を利用して生成される第1の入力信号を受信する工程と、第1の入力信号が、制御ループの第1の予定時間枠の間に受信されたか否かをプロセス制御システム内で判定する工程と、後に続く入力信号が、後に続く制御ループの予定時間枠の間に受信されるように、第1のプロセス制御装置から受信される後に続く入力信号のタイミングをプロセス制御システム内で調整する工程であって、後に続く入力信号のタイミングは、第1の入力信号が受信された時間に少なくとも基づいている、タイミングを調整する工程と、を含んでいる。
(もっと読む)
電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法
【課題】垂直軸や外力が掛かる状況で大きなストロークで使用する電動機が含まれる複数軸の軸間を含む機械特性を多軸伝達関数として測定するとともに、制御器の安定度を把握し、機械特性に合わせた軸間を含めた制御器の調整度合いを把握できる相互一巡開ループ伝達関数を算出する電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法を提供する。
【解決手段】複数軸の電動機制御装置において、自己一巡開ループ伝達関数算出部8と、相互一巡開ループ伝達関数算出部9と、機械特性演算部11と、特性演算部10と、を備える。
(もっと読む)
制御装置
【課題】 バイラテラル(マルチラテラル)方式による同期制御において、制御系の導出や調整を簡易化しつつ、同期精度を向上させることを目的としている。
【解決手段】 同期誤差が入力される第1学習フィルタ及び第2学習フィルタを含み、第1学習フィルタの出力にもとづいて第1の制御対象に制御入力をフィードフォワードし、第2学習フィルタの出力にもとづいて第2の制御対象に制御入力をフィードフォワードする反復学習制御回路とを備える。さらに、第1学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含み、第2学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含む。
(もっと読む)
停止時間の推定装置、及び推定方法
【課題】温度制御対象の温度制御を一旦停止させる場合において、効率よく温度制御するための停止時間を推定する推定装置、及び推定方法を提供する。
【解決手段】ヒータが設けられた温度制御対象を所望の再稼動時点において設定温度で起動するために、ヒータを停止させることが可能な停止時間を推定する推定装置であって、温度制御対象の降温変化率を入力する降温変化率入力部22と、ヒータが停止する時点の停止時点から再稼動時点までのインターバル時間を入力するインターバル時間入力部21と、停止時点における温度設定値あるいは温度計測値と、再稼動時点における温度設定値との設定値差を入力する設定値差入力部23と、降温変化率とインターバル時間と設定値差とに基づいて、停止時間を推定する停止時間推定値算出部24と、を備えている。
(もっと読む)
制御装置、制御プログラム及び方法
【課題】ニューラルネットワーク制御に係る処理負荷を軽減させる制御装置、制御プログラム及び方法を提供する。
【解決手段】互いにネットワーク構成が異なる複数のニューラルネットワークのうち、所定のニューラルネットワークである第1ニューラルネットワークを選択し、複数のニューラルネットワークのうち、第1ニューラルネットワークとは異なるニューラルネットワークである第2ニューラルネットワークを選択し、第1ニューラルネットワークによる制御と、第2ニューラルネットワークによる制御とによる制御誤差を測定し、第1ニューラルネットワークによる制御誤差と、第2ニューラルネットワークによる制御誤差とを比較し、より制御誤差が低いニューラルネットワークを判断する選択部16と、選択部16によってより制御誤差が低いと判断されたニューラルネットワークによりシステムの動作を制御する算出部16及び最終コントローラ102とを備える。
(もっと読む)
粘性摩擦同定装置を備えたモータ制御装置
【課題】モータ速度がノイズを多く含む場合にもノイズの粘性摩擦同定精度に与える影響を除去することができ、微小動作のみで粘性摩擦同定をすることができる粘性摩擦同定装置を備えたモータ制御装置を提供する。
【解決手段】入力指令が複数の周波数成分を含む周期信号であって、粘性摩擦同定装置107が、前記入力指令の複数の周波数成分におけるトルク指令と、前記入力指令の複数の周波数成分における前記モータ位置とに基づいて、粘性摩擦同定値を演算するものである。
(もっと読む)
モータ制御装置
【課題】 フィードバック制御系のサンプリング速度とモデル制御系のサンプリング速度との差に起因する影響を、従来よりも少ない演算量で抑制して、モデル追従制御を実施できるモータ制御装置を提供する。
【解決手段】 速度制御器115は、モデル制御系105のサンプリング速度の遅れに相当する伝達関数を有するローパスフィルタ113と、速度積分器117を含む積分制御系116と、比例制御系118と、速度比例ゲイン乗算部119とを含んでいる。積分制御系116は、加算部SP2によって加算された速度指令とモデル速度指令とを合算した指令から、ローパスフィルタ113から出力された遅延速度情報を減算部SP4で減算した指令を、速度積分器117に入力する。
(もっと読む)
制御器、制御方法および制御プログラム
【課題】試行回数(学習時間)を減少させて、実タスクへ適用可能な方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果により定常分布の対数の偏微分を推定し、これを用いて、新しい自然方策勾配である「自然定常方策勾配」を推定して、方策パラメータを更新し、これにより方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
比較判定装置及び比較判定方法
【課題】プラントモデルを用いたダイナミックシミュレーションにおける予測の精度を高めることである。
【解決手段】シミュレーション装置10は、実プラントの測定データと、前記実プラントのプラントモデルのトラッキングモデル部113と同じプラントモデルの解析モデル部115によりシミュレーションされた将来の予測結果を示す予測データと、が記憶されるデータベース30から、前記測定データ及び前記予測データを読み出し、当該測定データ及び当該予測データの差分情報を算出し、当該差分情報に応じて当該差分情報に応じて測定データ及び予測データに誤差が発生したか否かを判定し、当該誤差が発生した場合に、トラッキングモデル部113の同定計算を行う同定モデル部114に、前記差分情報を前記同定計算に用いる誤差情報として出力する比較判定部112を備える。
(もっと読む)
調節計およびその調整方法
【課題】モータおよび/またはポテンショメータとの間が誤配線(誤接続)が許容し得る場合には、そのまま初期設定を行って前記モータを制御することのできる調節計の調整方法を提供する。
【解決手段】モータに逆転駆動した状態でポテンショメータの抵抗値の変化が停止したときの該ポテンショメータの抵抗値を第1の基準抵抗値として検出した後、前記モータを正転駆動状態で前記ポテンショメータの抵抗値の変化が停止したときの該ポテンショメータの抵抗値を第2の基準抵抗値として検出し、前記モータの回転方向に応じて前記第1および第2の基準抵抗値を前記モータの回転角制御の基準(0%抵抗値および100%抵抗値)として設定する。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】機器の故障から効率的に回復することができるようにする。
【解決手段】システム2−4の制御が正常に行われていないとシステム状態判定部2−2により判定された場合、システム予測部2−9により予測されるシステム2−4の挙動に基づいて、目標記憶部2−1に記憶されている目標値Gを実現するためのモータ信号mtの時系列であるモータ信号系列m1,m2,…,mTが探索部2−5により探索される。モータ信号系列m1,m2,…,mTが1時刻分ずつシステム2−4に実際に入力されることによって目標値Gを実現することができた場合、モータ信号系列m1,m2,…,mTと、対応するセンサ信号系列S1,S2,…,STに基づいて、制御部2−3がシステム2−4を制御するのに用いるパラメータが更新される。本発明は、自動制御を行う情報処理装置に適用することができる。
(もっと読む)
状態制御システム及び装置
【課題】汎用的な状態制御装置を複数台組み合わせた場合でも、これらを同期させ、消費電力を平均化することのできる状態制御システムを得る。
【解決手段】優先度が最上位の状態制御装置100aは、制御対象400への駆動信号の出力が完了した場合に出力完了信号を送出する。優先度が中位,下位の状態制御装置100b,cは、優先度が一つ上の状態制御装置100a,bから出力完了信号が送出されたことを完了信号監視部103が検知した場合、制御信号生成部102は、自装置の制御対象400への駆動信号を送出する。
(もっと読む)
プラントの制御装置および火力発電プラントの制御装置
【課題】モデル入出力数に拘らず、制御周期以内での学習を可能とするプラント制御装置を提供する。
【解決手段】プラントの挙動を模擬するモデルの入出力を分割し、複数の学習手段に分割したモデル入力の操作方法を学習させることによって学習を高速化し、制御周期以内で学習を終了できるようにした。計測信号データベース、操作信号データベース、プラントに操作信号を与えた時の計測信号の値を推定するモデル、操作信号に該当するモデル入力と計測信号に該当するモデル出力を複数のグループに分割し、各グループのモデル出力が設定した目標値を達成するように各グループのモデル入力の生成方法を学習する複数の学習手段、学習手段によって生成された各グループのモデル入力を集約しモデルへ入力する機能、各グループのモデル出力の分割設定情報に従いモデル出力を分割し、該当する学習手段に対して夫夫出力する機能を持つモデル入出力生成手段を備える。
(もっと読む)
1 - 20 / 32
[ Back to top ]