
Fターム[5H004HA10]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 力 (25)
Fターム[5H004HA10]に分類される特許
1 - 20 / 25
制御装置及び制御方法
【課題】状態に応じて制御則を切り替えて操作量を演算する制御装置及び制御方法のために演算負荷を低減する手法を提供する。
【解決手段】制御装置100は、状態空間を分割する複数の凸多面体の各々に制御則が対応付けられており、状態ベクトルの属する凸多面体に対応する制御則を使用して操作量を演算する速度制御器110と、状態空間を規則的に区切る複数のメッシュのうち状態ベクトルの属するメッシュに関連する制御則を候補として、状態ベクトルの属する凸多面体に対応する制御則を該候補から決定する検索器112と、を備える。
(もっと読む)
制御装置及び方法

【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
規範応答演算装置およびそれを用いた車両用制駆動力制御装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
プラントの制御装置
【課題】 プラントを制御する制御量のリミット処理を行うことによる制御性の悪化を最小限に抑制することができるプラントの制御装置を提供する。
【解決手段】 リミット処理の対象となるフィードバック制御量UMとリミット処理後フィードバック制御量UMFとの差分値dLMTの過去値に応じて、フィードバック制御量の修正値DLMが算出され、フィードバック制御量Uを修正値DLMにより修正して、修正フィードバック制御量UMが算出される。修正フィードバック制御量UMのリミット処理が行われ、リミット処理後フィードバック制御量UMFが制御入力としてプラントに入力される。修正値DLMは、プラントの応答特性を示す応答特性パラメータαに応じた値に設定される修正係数KMと、差分値dLMTの過去値とを用いて算出される。
(もっと読む)
波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法
【課題】温度センサを用いずに温度変化に伴う波動歯車減速機の摩擦特性変動下における制御性能の向上を達成可能なアクチュエータの適用型摩擦補償方法を提案すること。
【解決手段】波動歯車減速機1を備えたアクチュエータ2の適応型摩擦補償法では、モータ駆動電流に印加する摩擦補償電流として、モータ軸6が偏差を持って静止した際には静止摩擦補償電流isを採用し、それ以外の場合にはクーロン摩擦補償電流icを採用する。静止摩擦補償電流isはステップ関数の補償量issに単調増加なランプ関数の補償量isrを加えたものであり、クーロン摩擦補償電流icとしてステップ関数の補償量icsを用いる。位置決め制御の応答中のデータに基づき摩擦補償量を適応的に変化させることができるので、周囲温度が変化して波動歯車減速機1の摩擦特性が変動しても、モータ軸6を大きな振動を伴うことなく目標角度に整定可能である。
(もっと読む)
制御パラメータ適合装置
【課題】適合データの信頼性を向上させることができる制御パラメータ適合装置を提供する。
【解決手段】電動パワーステアリングシステムの機械的な構成要素が持つ粘性摩擦及びクーロン摩擦等の動的特性の製品間のばらつきを加味して、ハンドルの自励振動等の特定の問題が最も発生しやすい条件を有してなる検証用モデルを備えた。そして当該検証用モデルに、適合された制御パラメータである適合データを与えて電動パワーステアリングシステムの動作をシミュレーションするとともに、当該シミュレーションの結果に基づき前記適合データの妥当性を検証する。これにより、量産時における製品間の動的特性のばらつきを考慮した制御パラメータの設定が可能となる。ひいては、適合データの信頼性が高められる。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
外乱振動抑制制御器
【課題】パラメータ設定に多くの工数を要することなく、外乱により発生する振動を抑制する効果を最大化できる外乱振動抑制制御器を得る。
【解決手段】ローパスフィルタを内在し、目標電圧Vref及び検出電流信号Iactに基づいて推定外乱電圧Vestを演算する外乱電圧推定オブザーバ61と、推定外乱電圧Vestの低周波成分をカットした信号Vest_HPを演算するハイパスフィルタ62と、Vest_HPにゲインKWを乗じて目標外乱抑制電圧Vref_wを演算する外乱電圧制御器(外乱制御器)63とを設け、前記ローパスフィルタのカットオフ周波数とハイパスフィルタ62のカットオフ周波数の積の平方根が外乱周波数と一致するように、前記ローパスフィルタ及びハイパスフィルタ62のカットオフ周波数を設定する。
(もっと読む)
繰り返して実行される作動サイクルを持つ制御対象のフィードバック制御を行うための方法および制御配列
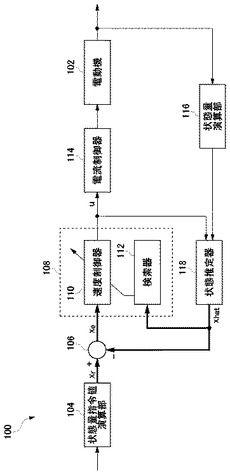
繰り返して実行される作動サイクルを持つ配列のフィードバック制御に際しては、例えばエンジン・テストスタンドにおいては、被験体(例えばエンジン)により、前記配列の作動周波数域で共振が励振されることがたびたびあるが、これは、フィードバック制御により減衰することができる。そのために本発明により、フィードバック制御の一つの現時点の実際値rist_aktと、以前に行われたいずれか一回の作動サイクルにおける実際値に基づいて、間近に生じるシステム・ディレイを随伴しない一つの実際値を予測した一つの値とから、一つの修正後の実際値rist_modを算出して、これを制御にフィードバックする制御コンセプトが提案される。  (もっと読む)
(もっと読む)
流体圧アクチュエータの試験装置
【課題】試験体である流体圧アクチュエータに加える負荷の模擬を精度良く行うことが可能な試験装置を提供すること。
【解決手段】流体圧アクチュエータ1に連結され流体圧アクチュエータ1の変位を制御する負荷用アクチュエータ10と、流体圧アクチュエータ10に接続された第1及び第2ポート21,22と流体圧供給源23との連通を切り換えることによって、流体圧アクチュエータ1の作動を切り換える切換弁24と、流体圧アクチュエータ1に加える動的模擬負荷を制御する制御手段50とを備え、制御手段50は、負荷用アクチュエータ10によって制御される流体圧アクチュエータ1の変位と、切換弁24の動作によって制御される第1及び第2ポート21,22の圧力とに基づいて動的模擬負荷を制御する。
(もっと読む)
制御装置及び制御方法
【課題】関節がギア・モータ系で構成されるマニピュレータにおける、完全に測定することができないパラメータ変動を簡易な方法により調整する。
【解決手段】マニピュレータ先端を壁などの固定部に押し当てて、力目標入力fref(N)で押し当てると、ギア・モータだけでなくリンク機構部分のばらつきも含んだ形で力出力fout(N)が出力される。それら2つの値を比較して、R(s)内部の直列ゲインをKrとしたとき、(fout/fref)×Kr=1となるようにKrを設定しR(s)を設計する。制御器内の各関節軸のR(s)すべてに反映させ、パラメータばらつきが原因のfref→foutの制御偏差を0にするように調整する。
(もっと読む)
サーボアンプ
【課題】自由度の高いゲイン調整を行うにあたって、制御系に関する深い知識を必要せず、手動による安定なゲイン調整を可能とする、サーボアンプを提供する。
【解決手段】ゲイン調整機能を備えたサーボアンプにおいて、ゲイン調整に必要なパラメータを周波数に換算して表示するパラメータ表示手段1と、制御上の制約となるパラメータ間の特定な組合せについて周波数比を表示する周波数比表示手段2を備え、周波数比表示手段2が表示した周波数比を参照してゲイン調整する。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
拡張仮想パワーモニタを備えることにより制御対象の安定性を評価解析する機能を備えた制御システム
【課題】システムに対して流入する仮想パワーを観測することによって当該システムの安定性を評価解析する制御システム2に対して、その安定・不安定の判定を是正する。
【解決手段】ユーザ制御対象3と、ユーザ制御則5と、ユーザ制御対象3からのフィードバック信号を受けてユーザ制御対象3に操作量を入力し得る保守的な制御則Hと、保守的な制御則Hからユーザ制御対象3へ仮想的に伝達される仮想パワー及び保守的な制御則からの操作量の大きさ及びユーザ制御対象の出力の大きさを観測する拡張仮想パワーモニタ10と、を備える。拡張仮想パワーモニタ10は、仮想パワーPv(t)のa倍および保守的な制御則からの操作量の大きさを二乗したb倍及びユーザ制御対象の出力の大きさを二乗した−1倍を観測し、それによって安定性の評価関数Ex(t)に、ユーザ制御システムの入出力ゲインが小さいほど安定方向に移行させる項を含める。
(もっと読む)
運動制御システム
運動制御システム(10)は、オペレータ入力部材(20)を有するオペレータインターフェース(13)と、オペレータ入力部材に駆動連結される制御可能な力フィードバック装置(18)とを含む。運動制御システムはまた、第2の操作パラメータの目標値(TARv)と第2の操作パラメータの実際値(ACTv)との間の制御誤差(Ec)に少なくとも部分的に関係するように第1の操作パラメータを調整することを含めて、1つ以上の可動構成要素(12)の運動を調整する制御部(14)を含むことが可能である。第2の運転パラメータの目標値は、オペレータ入力部材の運動に少なくとも部分的に基づくことが可能である。制御部はまた、制御誤差に少なくとも部分的に関係するように、および制御誤差に対するフィードバック力の導関数が少なくとも部分的に制御誤差に応じて変化するように、制御可能な力フィードバック装置を操作してフィードバック力をオペレータ入力部材に提供することが可能である。  (もっと読む)
(もっと読む)
変速シミュレーション装置、変速シミュレーションプログラムおよび自動車
【課題】入力指令値もしくは変速動作を制御する装置の構成要素の特性値の変動に強い自動変速機制御用の入力指令値を得る。
【解決手段】入力指令値を初期設定し(S1)、その入力指令値に変更を加えてモデルによる変速シミュレーションを行う(S2)。そのシミュレーションの出力から、その出力による変動が小さくなるように目標波形を修正する(S4)。そして、修正された目標波形を得る入力指令値を学習計算によって得る(S5)。S2に戻り処理を繰り返し、変動が所定以内になることによって、適切な目標波形が得られ、その目標波形を達成する入力指令値を得ることができる。目標波形は、ファジィ推論によっても、感度解析によって求めてもよい。
(もっと読む)
シミュレーションモデルの同定方法およびそのプログラム
【課題】複数のパラメータについての外乱を考慮したモデルを同定する。
【解決手段】パラメータ(外乱)の種類iを決定し(S1)、各パラメータ毎に、残差モデルを作成する(S2)。モデル出力と実機の出力との残差を計算し(S3)、その計算結果に基づいて、複数のパラメータの外乱の大きさを同定する(S4)。このとき、1つの残差についてパラメータの種類に応じた複数の外乱モデルの大きさを同定する。
(もっと読む)
動作検証システムおよび駆動用モータ制御装置
【課題】負荷機械の実機を用いることなく負荷機械の動作を検証可能とする動作検証システムを一定の検証精度を確保しつつ、規模およびコストの増加を招来することなく実現すること。
【解決手段】負荷機械の実機を接続することなく負荷機械の動作を検証する動作検証システムにおいて、負荷機械の実機の全部または一部を模擬した負荷機械模擬モデルを具備してなる計算機13と、負荷機械に接続されるべき駆動用モータ12と、駆動用モータ12を制御する駆動用モータ制御装置11と、を備え、計算機13は、駆動用モータ12から出力される位置情報に基づいて負荷機械模擬モデルに生ずる反力トルクを演算し、駆動用モータ制御装置11は、駆動用モータ12に付与すべきトルク指令を反力トルクに基づいて修正する。
(もっと読む)
制御装置
【課題】繰り返し試行する時間を省くことで力制御ゲインの設定及び調整を容易に行うことができる制御装置を提供する。
【解決手段】力制御回路7の内側に位置制御回路8を有する力制御システムによりロボット1を力制御する制御装置において、ロボット1を駆動する実際の制御条件で、ロボット1の個々の駆動軸に関する位置制御回路8の時定数Tを取得する時定数取得手段11と、ロボット1を駆動する実際の制御条件で、ロボット1の剛性値Kを取得する剛性値取得手段12と、力制御回路7の時定数が位置制御回路8の時定数Tより大きくなる条件で、時定数取得手段11で取得された位置制御回路8の時定数Tと剛性値取得手段12で取得された剛性値Kとから力制御回路7の力制御ゲインを算出するゲイン自動算出手段10と、を備える。
(もっと読む)
非線形特性再現装置、非線形抵抗再現装置、および非線形特性再現プログラム記憶媒体
【課題】本発明は、状態量に非線形変換を施して出力する非線形特性再現装置に関し、製品や部品の非線形な挙動や振る舞いをモデル化して再現する。
【解決手段】入力状態量の、次期標本化時期における推定観測量を入力して、次期標本化時期における出力状態量の推定値が推定観測量で規格化されてなる規格化推定値を求める非線形特性再生部と、非線形特性再生部で求められた規格化推定値に基づく非線形演算により、次期標本化時期における入力状態量を次期標本化時期における出力状態量に変換する状態量変換部とを備えた。
(もっと読む)
1 - 20 / 25
[ Back to top ]