
Fターム[5H004HA13]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 比率 (18)
Fターム[5H004HA13]に分類される特許
1 - 18 / 18
制御装置
【課題】離散時間系の制御対象モデルを用いて、所定の拘束条件が複数のモデルパラメータ間に存在する制御対象や、1次遅れなどの遅れ特性を有する制御対象を制御する場合において、制御精度および制御の安定性を向上させることができる制御装置を提供する。
【解決手段】制御装置1は、ECU2を備える。ECU2は、2つのモデルパラメータα,1-αを含む制御対象モデルを整理し、モデルパラメータαが乗算されていない項および乗算されている項を制御対象モデルの左辺および右辺にそれぞれ振り分けるとともに、左辺を合成信号値W_actとし、右辺を推定合成信号値W_hatとしたときに、合成信号値と推定合成信号値との間の同定誤差eid'が最小となるように、モデルパラメータαの同定値αidをオンボードで算出し、この同定値αidと制御対象モデルから導出された制御アルゴリズム(式(34),(35))とを用いて、空燃比補正係数KAFを算出する。
(もっと読む)
制御装置

【課題】むだ時間や応答遅れが変化する特性を備えた制御対象を制御する場合において、制御精度を向上させることができる制御装置を提供する。
【解決手段】制御装置1のECU2は、4個のむだ時間dがそれぞれ経過したタイミングでの制御量として、4個の予測値PRE_KACT_4-iを算出し、排ガスボリュームVexに対応する4個の重み関数値Wdiを算出し、重み関数値Wdiを予測値PRE_KACT_4-iにそれぞれ乗算することにより、4個の乗算値Wdi・PRE_KACT_4-iを算出し、4個の乗算値Wdi・PRE_KACT_4-iの総和を予測当量比PRE_KACTとして設定し、予測当量比PRE_KACTが目標当量比KCMDになるように、空燃比補正係数KAFを算出する。
(もっと読む)
プロセス制御システム
【課題】制御ノウハウに相当する制御ロジックを自動的に作成すると共に、今制御ロジックがどのように動作するかを確認することができるプロセス制御システムを提供する。
【解決手段】プラント10のプロセスを制御するプロセスコントローラ21に対し、プロセスを制御するための、各種の状態信号や測定値、制御目標値、及び制御量を含むプロセスデータを蓄積するデータ保存部32を設け、この蓄積されたプロセスデータから、プロセスの状態量に対する制御目標値を満足する制御量及び制御結果に関するデータを用い、制御ロジック作成装置31で、これらデータ相互の関係から制御ノウハウに相当する好適な制御ロジックを作成する。作成された制御ロジックは、制御シミュレーション機能33、プロセスシミュレーション機能34を有するシミュレータ35でシミュレートし、検証された制御ロジックがプロセスコントローラ21の制御ロジックとして適用される。
(もっと読む)
原料配合方法及び装置
【課題】複数種類の原料を配合する原料配合プロセスにおいて、容器や袋等に梱包された質量に対応する離散的な数値と、この離散的な数値に満たない端数とによって配合すべき原料の質量を扱うことができる原料配合方法を提供する。
【解決手段】原料配合方法は、配合後の原料に要求される要求質量及び成分比の要求範囲と、複数種類の原料の在庫質量及び成分比とに基づいてパラメータを設定するパラメータ設定ステップS2及びS3と、設定されたパラメータを用いて、一次式で表された複数の制約式を満足する少なくとも1つの解を求める演算ステップS4とを含み、上記複数の制約式は、要求質量を満足する複数種類の原料の質量を、原料が梱包された単位質量と該単位質量に満たない端数質量との内の少なくとも一方を用いて直接又は間接的に表す制約式と、成分比の要求範囲を満足する複数種類の原料の質量を、上記単位質量と端数質量との内の少なくとも一方を用いて表す制約式とを含む。
(もっと読む)
車両の制御装置
【課題】ダイナミクスを考慮したモデリングを可能にして推定精度を向上させると共に、限られたメモリ容量しか実装できない車両へのJITモデリングの適用を可能にするようにした車両の制御装置を提供する。
【解決手段】車両の運転を示すパラメータ群を計測し(S10)、計測されたパラメータ群を入力とし、対応して設定された出力と共に入力データuDB(i)、出力データyDB(i)として時系列に従って蓄積して蓄積データを得(S12)、入力に対して時刻tのときのモデルを同定するための要求点を設定し(S14)、設定された要求点と蓄積入力との距離を過去の入力も含めて求めて類似度を算出し(S16)、蓄積データから距離が小さいデータの集合を探索して近傍のデータとして決定し(S18)、それに含まれる出力データから推定出力を算出し(S20)、それに基づいて車両の運転を制御する(S22)。
(もっと読む)
車両の駆動力制御装置
【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
内燃機関の空燃比制御装置
【課題】経年変化によらず内燃機関の運転状態を正確に判定し、判定された運転状態に応じて高精度な制御が可能な内燃機関の空燃比制御装置を提供する。
【解決手段】内燃機関の空燃比制御装置が、実際の燃料噴射量である実燃料噴射量u及びその噴射による空燃比である実空燃比yを保存する記憶手段と、保存された実燃料噴射量u及び実空燃比yに基づいて所定時間経過後の内燃機関の運転状態である先読み運転状態fcを推定する運転状態推定手段と、保存された実燃料噴射量u及び実空燃比y並びに先読み運転状態fcに基づいて前記所定時間経過後の空燃比である先読み空燃比faを推定する空燃比推定手段と、先読み空燃比faに基づいて燃料噴射量を補正する燃料噴射量補正手段とを具備する。
(もっと読む)
制御システムの構築方法及び制御システム
【課題】逆モデルに依らず、安定したフィードフォワード制御系を構築することが可能な技術を提供する。
【解決手段】本発明では、伝達関数P(z-1)を、遅延演算子z-1の多項式N(z-1),D(z-1)を用いて、P(z-1)=N(z-1)/D(z-1)で表現可能な制御対象を制御するに際し、次の方法で、制御システムを構築する。即ち、規範モデルM(z-1)を、伝達関数P(z-1)の分子N(z-1)を含む関数M(z-1)=N(z-1)・L(z-1)に設定して、所望の規範モデルM(z-1)に対応する関数L(z-1)を導出する。そして、フィードフォワード操作量uff(i)を、関数L(z-1)及び伝達関数P(z-1)の分母D(z-1)を含む式Uff(i)=D・L・r(i)に従って、算出するように、フィードフォワード制御系を構築する。このようにして、本発明では、逆モデルP-1を用いずに、フィードフォワード制御系を実現する。
(もっと読む)
自動適合装置及び方法
【課題】効率的且つ効果的に適合値を決定する。
【解決手段】自動適合システム100において、次善最適解決定処理が実行される。当該処理においては、パラメータx1及びx2に応じて変化する目的関数F1及び制約関数F2相互間のパレート解が、適合範囲内のパラメータ値について導出され、目的関数F1及び制約関数F2により規定される座標平面上で、パレート解に対応する座標点を繋げて得られるパレート解曲線PRF_Pが設定される。一方、当該適合範囲でパラメータを変化させた場合の、目的関数F1及び制約関数F2各々における最大値と最小値との偏差DOPT及びDLIMに基づいて規定される傾きkに、更にエンジン200の定常比率Aに応じて定まる補正係数αを乗じてなる傾きk’の直線が設定される。この直線とパレート解曲線との接点に対応するパレート解が、次善的な最適解として抽出される。
(もっと読む)
制御装置および異常判定装置
【課題】むだ時間の変化を逐次推定し高精度な制御を実施することができる制御装置を提供する。
【解決手段】制御対象を離散数式モデルで表したプラントモデルを用い、該プラントモデルに制御対象への入力を加えた際の出力であるプラントモデル出力と制御対象の実出力との差である同定誤差をゼロに近づけるようにプラントモデルのパラメータを同定する。このとき、同定処理により算出された離散モデルパラメータ、若しくは離散モデルパラメータに基づいて算出されるむだ時間以外のパラメータの変化により、むだ時間の信頼性を判定することで、むだ時間を精度良く算出することが可能となる。
(もっと読む)
制御装置
【課題】プラントモデルがむだ時間を含む2次以上の高次遅れ系であっても、演算負荷を従来より軽減できるようにする。
【解決手段】制御対象(触媒+下流側排気ガスセンサ)を模擬するプラントモデルは、むだ時間を含む2次遅れ系で近似すると共に、2次遅れ系は、2つの1次遅れ系に分割して離散化した後結合して近似する。制御対象の入力をプラントモデルに入力した時のプラントモデル出力と制御対象の実出力との差である同定誤差をゼロに近付けるようにモデルパラメータを同定する。同定したモデルパラメータに含まれるむだ時間の一部の情報の変化に基づいてむだ時間を制御対象の実むだ時間に近付けるように推定する。
(もっと読む)
原料配合率決定方法、装置及びプログラム
【課題】複数の特性値を持つ複数の銘柄の原料を配合して製品を製造するプロセスにおける各銘柄の配合率を決定する方法、装置及びプログラムを提供する。
【解決手段】本装置20は、対象とする全ての原料の特性値を読み込む原料特性値読み込み部21と、製品に要求される特性値の上限値、下限値及び目標値を読み込む製品特性値読み込み部22と、各種制約条件式を求め、この各種制約条件式等を用いて、製品の各特性値を目標値に近づけるための評価関数式を最小化する各原料の配合率を求めることにより、製品の各特性値に関して、これらの値と目標値との差を少なくし、かつ、これらの値の上下限値への接近を回避するような原料の配合率を決定する配合率決定部23等を具備するものである。
(もっと読む)
スライディングモード制御を用いた制御装置及び制御方法
【課題】 車両用の無段変速機等の制御に好適な、スライディングモード制御を用いた制御に関し、制御のハンチングをより確実に防止することができるようにする。
【解決手段】 無段変速機の目標変速比に応じた可動プーリの第1目標ストロークx1*を設定し、第1目標ストロークx1*に、可動プーリの実ストロークxとこの第1目標ストロークx1*との偏差e´の大きさに応じた遅れを与えて得られる第2目標ストロークx2*を用いてスライディングモード制御の切り換え関数σを設計し、この切り換え関数σに基づいてスライディングモード制御の非線形入力u´nlを演算し、演算した非線形入力を含む制御入力によりスライディングモード制御により可動プーリの位置を制御し、目標変速比状態とする。
(もっと読む)
多入力多出力系の制御装置
【課題】多入力多出力系のモデルを高い精度で構築するとともに、計算負荷を抑えることで、内燃機関などのプラントを最適に制御すること。
【解決手段】 実機を非線形モデルで近似した精密モデル10を作成する精密モデル作成手段と、精密モデル10へ入力される複数の入力値U1(t),U2(t),・・・,Uj(t)の制約条件を設定する入力制約条件設定手段と、実機を線形モデルで近似した簡易線形モデル11を作成する線形モデル作成手段と、簡易線形モデル11を用いて、目標出力に対する最適入力を算出する最適入力算出手段と、最適入力に基づいて、制約条件を絞り込む制約条件限定手段と、絞り込まれた制約条件に基づいて、実現し得る複数の入力値U1(t),U2(t),・・・,Uj(t)の全ての組み合わせを精密モデル10へ入力する入力手段と、入力値U1(t),U2(t),・・・,Uj(t)に対応して精密モデル10から出力された複数の出力値Y1(t),Y2(t),・・・,Yk(t)を評価する評価手段と、を備える。
(もっと読む)
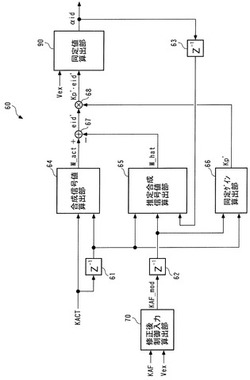
制御装置
【課題】 ΔΣ変調アルゴリズムまたはΣΔ変調アルゴリズムを用いることにより制御対象を制御する場合において、一方の変調アルゴリズムの入出力間での符号反転の際のむだ時間を低減することができ、制御対象の出力の目標値への収束性を向上させることができ、制御性を向上させることができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、参照入力DSMVO2の制限値DSMVO2Lを、DSMVO2<-1のときにはDSMVO2L=-1(ステップ38)、1<DSMVO2のときにはDSMVO2L=1(ステップ40)、それ以外のときにはDSMVO2L=DSMVO2(ステップ41)として算出する。そして、この制限値DSMVO2Lを、ΔΣ変調アルゴリズムに入力することより、DSM出力DSMSGNSを算出し、DSM出力DSMSGNSに応じて、酸素濃度センサ15の出力Voutを目標値Vopに収束させるように、内燃機関3に供給される混合気の空燃比を制御する(ステップ1〜13,25,26)。
(もっと読む)
制御装置
【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
モデル生成方法、状態予測方法、状態調整方法、モデル生成装置、状態予測装置、及び状態調整システム
【課題】 高炉を用いた銑鉄の生産等の断続的に原料を投入して生産物を取り出す生産プロセスについて、生産プロセスの状態を予測するためのモデル式を簡便に生成することができるモデル生成方法、状態予測方法、状態調整方法、モデル生成装置、状態予測装置、及び状態調整システムを提供する。
【解決手段】 状態予測装置1は、生産プロセスでの各種の生産条件を示す条件データ及び生産プロセスの状態を示す状態データを蓄積しておき、ある時点で得られた状態データとその時点以前の所定期間内で得られた複数種類の条件データとの対応関係を解析して、条件データから状態データを予測するモデル式を生成する。状態予測装置1は、生成したモデル式を用いて未来の状態データを予測できる。生産条件が変動した場合でも、モデル式に基づいて他の生産条件を適宜制御することにより、生産プロセスの状態を良好に調整することができる。
(もっと読む)
炭化水素製造施設を操作する方法およびシステム
炭化水素または化学製品を製造する施設を操作するシステムおよび方法において、該施設を数学的にモデル化し;線形および非線形のソルバーを用いて該数学モデルを最適化し;該最適解に基づいて一つまたはそれ以上の製品に対する処方または操作設定点を生成させるシステムおよび方法。一具体化例においては、該数学モデルはさらにプロセス変数および対応する係数を有する多数のプロセス方程式を含んで成り、好ましくは該プロセス変数および対応する係数を使用して線形プログラムの中にマトリックスをつくる。線形プログラムは回帰法または分配回帰法によって実行することができる。逐次行われる再帰計算過程に基づいて、プロセス変数および対応する係数の一部に対する修正値を線形ソルバーにより、また非線形ソルバーにより計算し、プロセス変数および対応する係数に対する修正値をマトリックスの中に代入する。 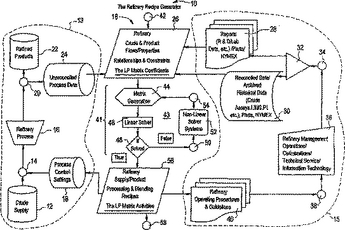 (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]