
Fターム[5H004HA16]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 複数変量の同時制御 (17)
Fターム[5H004HA16]に分類される特許
1 - 17 / 17
モデル予測制御装置およびプログラム
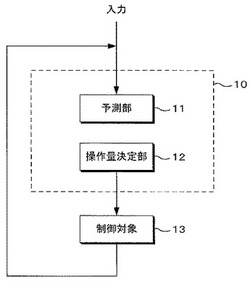
【課題】制御量を目標値とする、という目標に加えて、制御量を目標値以下若しくは以上とする、または、制御量を極力小さくするという目標を同時に実現する。
【解決手段】プロセスモデルに基づいて、被制御量の変化を予測し、操作量を変化させるモデル予測制御装置10であって、被制御量の予測式を用いて、被制御量の変化の予測値を算出する予測部11と、算出した予測値および目標値からの被制御量の超過分を示す変数または目標値からの被制御量の不足分を示す変数の少なくとも一方を含む評価関数を用いて、被制御量が目標値以下となるように、操作量を決定し、被制御量が目標値以上となるように、操作量を決定し、被制御量が目標値となるように、操作量を決定し、被制御量が最小化するように、操作量を決定し、または、被制御量が最大化するように、操作量を決定する操作量決定部12と、を備える。
(もっと読む)
電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法

【課題】垂直軸や外力が掛かる状況で大きなストロークで使用する電動機が含まれる複数軸の軸間を含む機械特性を多軸伝達関数として測定するとともに、制御器の安定度を把握し、機械特性に合わせた軸間を含めた制御器の調整度合いを把握できる相互一巡開ループ伝達関数を算出する電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法を提供する。
【解決手段】複数軸の電動機制御装置において、自己一巡開ループ伝達関数算出部8と、相互一巡開ループ伝達関数算出部9と、機械特性演算部11と、特性演算部10と、を備える。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
プラント運転システム
【課題】
複数の入力項目と複数の出力項目を有するプラントを対象として、トレードオフの関係にある出力項目の値を考慮した操作量を迅速に決定できるプラント運転システムを提供する。
【解決手段】
複数のプラントの出力項目のそれぞれについて出力許容範囲を設定する出力許容範囲設定部82と、全ての出力項目の値が出力許容範囲設定用図形86で設定した出力許容範囲内となるプラントの操作項目の操作量の組合せである許容操作量を求める許容操作量取得部52と、許容操作量の値、又は許容操作量の値の存在範囲を画面に表示する許容操作量表示部54と、許容操作量に対応する出力項目の値を画面にグラフ表示する出力項目グラフ表示部56と、を備えた。
(もっと読む)
振動機に油圧流体を供給する油圧ユニットのためのサーボ制御システム
【課題】振動機のエネルギー消費を抑制する。
【解決手段】油圧システム7のためのサーボ制御システムは,油圧流体を受ける少なくとも一つの油圧モータによって回転駆動される偏心ウエイトを含む振動機1又は振動システムに,前記流体を供給する,モータ9により駆動されるポンプ8を含む。振動機1により実際に消費されているエネルギーに関連する,油圧ユニット7のモータ9の回転速度の連続的な適応のための適応手段をさらに含む。
(もっと読む)
最適制御方法、最適制御システム、統括制御装置およびローカル制御装置
【課題】複数の制御パラメータの最適化を可能とし、かつ、その制御システムの構築に要する時間と工数とを低減することを可能にする。
【解決手段】最適制御システム10は、ローカル装置4を制御するローカル制御部31と、複数のローカル制御部31を統合的に制御する統括制御装置2と、ローカル制御部31と統括制御装置2との間にあって、その間で送受信される制御情報を標準化する制御情報標準化インタフェース1とからなる。そして、制御情報標準化インタフェース1は、ローカル装置4の制御について所定の標準物理量で表した制約条件、評価関数、属性情報を記憶した制御条件情報記憶部12と、ローカル装置4から取得されるローカル物理状態量を標準物理状態量に変換するとともに、統括制御装置2によって算出された最適制御目標値をローカル制御目標値に変換する物理量変換部11とを備える。
(もっと読む)
PWMアルゴリズムを用いたプラントの制御装置
【課題】制御対象の非線形特性が高い場合でも、非線形特性を補償して、制御対象の出力の振動を抑制することができるプラントの制御装置を提供する。
【解決手段】本発明は、PWMアルゴリズムを用いたプラントの制御装置を提供する。この装置は、前記プラントの出力を目標値に制御するための仮制御入力を算出する手段と、前記仮制御入力を複数の成分に分割する手段と、前記複数の成分のうち少なくとも1つをPWM変調する手段と、前記PWM変調された成分と、他の成分を加算して前記プラントへの制御入力を生成する手段と、を有する。この装置により、PWM変調によるプラントの非線形特性の補償能力を維持しつつ、入力変動を最小化することができる。これにより、仮制御入力が大きく変化するプラントにおいても、出力が振動的になることを回避でき、制御性が向上する。
(もっと読む)
装着式動作補助装置及び制御用プログラム
【課題】 装着者の個人差や体調等の変動要因によらず、制御方法に応じた効果を発揮することのできる装着式動作補助装置及び制御用プログラムを提供することを解決すべき課題とする。
【解決手段】 動作補助装置10では、装着者12に装着された状態において当該装着者12固有の動力学パラメータをパラメータ同定部160により同定し、該同定した動力学パラメータを代入した運動方程式に基づき制御装置100により駆動源140を制御するように構成してあるため、装着者12の個人差や体調等の変動要因によらず、制御装置100に適用される制御方法に応じた効果を発揮することができる。
(もっと読む)
プラントの制御装置
【課題】複数の制御入力と複数の制御量との間に存在する相互干渉を解消しながら、複数の制御量を制御する場合において、制御性および制御精度を向上させることができるプラントの制御装置を提供する。
【解決手段】制御入力としてのTH_cmd,Liftin_cmdと、制御量としてのPB,Gcylとの間に相互干渉が存在するプラント90の制御装置1は、プラント90を離散時間系モデルとしてモデル化したプラントモデル(式(20))に基づく、所定の応答指定型制御アルゴリズム(式(2)〜(8))と所定の非干渉制御アルゴリズム式(9)とを組み合わせた所定の制御アルゴリズムにより、2つの制御入力TH_cmd,Liftin_cmdを、PB,Gcylを目標値PB_cmd,Gcyl_cmdにそれぞれ追従させるための、相互干渉を解消するような2つの非干渉化入力として算出する。
(もっと読む)
モデル予測制御装置およびモデル予測制御方法
【課題】 モデル予測制御において、予測演算時間を短縮しかつ安定制御を実行する。
【解決手段】 最適操作量候補検索部31により、最適操作量の候補を検索し、モデル予測部33により、制御対象20の動特性モデルを用いて制御量を予測し、評価部35により、予測された前記制御量と目標値との偏差をとって評価し、最適操作量を決定する。最適操作量候補の検索に先立って、操作量検索範囲設定部4により制御対象の動特性モデルを用いて検索範囲を設定し、無駄な検索を行なわないようにする。また、今回の予測制御を開始するにあたって、前回の最適操作量を今回の最適操作量の候補として予測した制御量と目標制御量との偏差が所定範囲内にある場合、前回の最適操作量を今回の最適操作量と決定するようにすれば、さらに予測に要する時間を短縮することができる。
(もっと読む)
モデル予測制御方法
【課題】 モデル予測制御において、最適化演算の処理時間を短縮し、かつ演算精度の低下を抑える。
【解決手段】 制御対象の動的モデルを用いて操作量の各変数について数値微分を行って微分値を求め、微分値を要素とするヤコビアン行列に基づいて評価点を移動させ、移動した評価点ごとに評価を行なって最適操作量を決定するモデル予測制御方法において、微分値を所定値と比較して(S13)微分値が所定値より小さい場合、評価省略フラグをオンにする(S14)。次回のヤコビアン行列作成プロセスでは微分値を0として、数値微分を省略できる。この場合、微分値を0とする数値微分ステップが終了すると評価省略フラグをオフにして(S18)、その次の数値微分ステップでは数値微分を行なうようにすると、演算精度が向上する。
(もっと読む)
工程パラメータの平均値の所望値への段階的制御
多段階制御機(610)は、工程を行うシステム(620)の稼動を指示する。前記工程は、複数の工程パラメータ(MPP)(625)を有するが、MPP(625)の1つ以上が制御可能な工程パラメータ(CTPP)(615)であり、MPP(625)の1つが目標設定工程パラメータ(TPP)(625)である。前記工程は、長さTPLAAV2の定義された時間におけるTPP(625)の実際平均値(AAV)に対する第1の限界を示す定義された目標値(DTV)を有する。前記AAVは、定義された期間におけるTPPの実際数値(AV)に基づいて計算される。第1論理制御器(630)は、少なくとも長さがTPLAAV2であり、現在時点T0から未来時点TAAV2まで延長される第1未来時間(FFTP)においてTPPの未来平均値(FAV)を予測し、このとき、前記TAAV2以前にTPP(625)が定常状態に移動する。FAVは、(i)長さがTPLAAV2以上であり、過去時点T−AAV2から現在時点T0まで延長される第1過去時間(FPTP)における様々な時点でのTPP(625)のAAV、(ii)MPP(625)の現在値、及び(iii)DTVを基にして予測される。第2論理制御器は、TPLAAV2の長さより短くTPLAAV1と等しい長さを有し、現在時点T0から未来時点TAAV1まで延長される第2未来時間(SFTP)の間にTTP(625)のAAVに対する第2の限界を示す追加的目標値(FTV)を確立する。FTVは、FFTPにおいて予測されたTPP(625)のFAVのうちの1つ以上に基づいて確立される。また、第2論理制御器は、(i)TPLAAV1の長さを有し、過去時点T−AAV1から現在時点T0まで延長される第2過去時間(SPTP)における様々な時点でのTPP(625)のAAV、(ii)MMP(625)の現在値、及び(iii)FTVに基づき、CTPP(615)各々に対する目標設定点を決める。第2論理制御機は、前記CTPP(615)に対して決められた目標設定点に従ってCTPP(615)各々の制御を指示する論理をさらに有する。 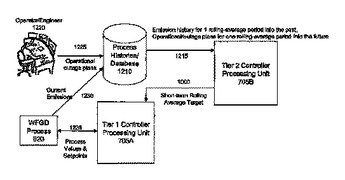 (もっと読む)
(もっと読む)
大気汚染制御工程のモデル予測制御
汚染物質の排出を制御する工程を行う大気汚染制御システム(620)の稼動を指示するための制御機(610)は、複数の工程パラメータ(MPP)を有する。MPP(625)のうちの1つ以上は、制御可能な工程パラメータ(CTPP)(615)であり、MPP(625)のうちの1つは、システム(620)により排出された汚染物質(AOP)(640)の量である。定義されたAOP(640)値(AOPV)は、前記排出されたAOP(640)の実際値(AV)に対する目的または限界を示す。制御機(610)は、各CTPP(615)と排出されたAOP(640)との関係を示す、神経回路網工程モデル又は非神経回路網工程モデルのいずれかを含む。制御演算装置(630)は、前記モデルに基づき、各CTPP(615)の現在値に対する変化が排出されたAOP(640)の未来AVにどのように影響を及ぼすかを予測し、前記変化の予測された影響及びAOPVに基づいて1つのCTPP(615)の変化の1つを選択し、CTPP(615)に対して選択された変化により前記1つのCTPP(615)の制御を指示する。 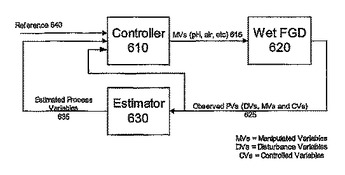 (もっと読む)
(もっと読む)
炭化水素製造施設を操作する方法およびシステム
炭化水素または化学製品を製造する施設を操作するシステムおよび方法において、該施設を数学的にモデル化し;線形および非線形のソルバーを用いて該数学モデルを最適化し;該最適解に基づいて一つまたはそれ以上の製品に対する処方または操作設定点を生成させるシステムおよび方法。一具体化例においては、該数学モデルはさらにプロセス変数および対応する係数を有する多数のプロセス方程式を含んで成り、好ましくは該プロセス変数および対応する係数を使用して線形プログラムの中にマトリックスをつくる。線形プログラムは回帰法または分配回帰法によって実行することができる。逐次行われる再帰計算過程に基づいて、プロセス変数および対応する係数の一部に対する修正値を線形ソルバーにより、また非線形ソルバーにより計算し、プロセス変数および対応する係数に対する修正値をマトリックスの中に代入する。 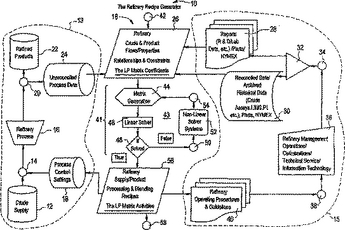 (もっと読む)
(もっと読む)
産業プロセスのための最適制御問題を生成する方法
本発明は、産業プロセスのモデル化のための、ミクスト・ロジカル・ダイナミック(MLD)フレームワークの使用を単純化し、前記産業プロセスのための、最適制御問題及びスケジューリングへの適用を自動的に生成して解くことを可能にする。本発明のコアとなる技術的アスペクトは、任意に接続された二つのMLDブロックを自動的にマージすることによって、一つの複合MLDブロックを得ることにある。この手順を繰り返して使用することにより、産業プロセスの完全な記述を含む、いかなる複雑なシステムであっても、最も単純なMLDビルディング・ブロックから、生成することが可能になる。最適制御問題は、一義的なアウトプットが問題のコスト汎関数となるMLDブロックを付け加えることにより生成される。グラフィカルな環境において、いかなる特定の産業プロセスも、ベーシックなMLDエレメントまたはアトミックなMLDブロックのライブラリーからの例示するブロックにより、且つ、それらを適切に接続することにより、再現することが可能である。適切なライブラリーが利用可能なケースにおいては、上記のグラフィカルな相互接続を構築するための能力を除いては、このプロセスは、エンド・ユーザーに対して専門的な知識を要求しない。  (もっと読む)
(もっと読む)
組合せ完成品用単位装置の最適化装置
【課題】 従来の問題点を解決し、使用者の選択性及び単位装置の汎用性を失うことなく、組合せ完成品としての最適な特性を得ることができる組合せ完成品用単位装置の最適化装置を提供すること。
【解決手段】 本発明に係る組合せ完成品用単位装置の最適化装置は、他の装置を組み合わせて組合せ完成品として用いられる単位装置の動作特性を制御する制御装置において、前記制御装置に、実時間で、組合せ完成品としての機能の特性を評価基準として、前記単位装置の動作特性を最適化する最適化処理部を設けたことを特徴としている。
(もっと読む)
温度制御装置及び同装置のバルブ制御部
【課題】 低温の循環流体をランプヒータで加熱して流体の温度制御を行う場合、制御の応答性と精度を高める。
【解決手段】 流体循環供給系31を循環する流体は、チラー32で冷却され、熱交換器33内のランプヒータで加熱される。ランプ制御部41は、ランプ出力を制御することで、流体の温度を設定温度に制御する。バルブ制御部43は、ヒータ出力が、制御に適した出力設定範囲内に入るように、チラー通路37の流量制御弁34とバイパス通路35の流量制御弁36の混合比を調節する。更に、バルブ制御部43は、開度と流量との関係が、開度の分解能が高温域で細かく低温域で粗くなるような重み付けを線形関係に加味した関係となるように、且つ、2つの流量制御弁34、36の流量を合計した循環流量が常に一定になるように、開度と2つの弁34、36の操作量(パルス数)との対応関係を定める。
(もっと読む)
1 - 17 / 17
[ Back to top ]