
Fターム[5H004HB10]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 力 (30)
Fターム[5H004HB10]に分類される特許
1 - 20 / 30
ロボット制御システム、ロボットシステム及びセンサー情報処理装置

【課題】 ハードウェアー化や安定性の検証や解の応答性の切り替えを容易にするロボット制御システム、ロボットシステム及びセンサー情報処理装置等を提供すること。
【解決手段】 ロボット制御システムは、力覚センサー10からのセンサー情報に基づいて、ロボット100の目標軌道の補正値を出力する力制御部20と、目標軌道に対して補正値に基づく補正処理を行なって目標値を求め、求めた目標値を出力する目標値出力部60と、目標値に基づいてロボット100のフィードバック制御を行うロボット制御部80とを含み、力制御部20はデジタルフィルター部22を有し、力制御部20はセンサー情報に対してデジタルフィルター部22によるデジタルフィルター処理を行うことで、力制御における常微分方程式の解を求めて、求めた解に基づいて補正値を出力する。
(もっと読む)
制御装置及び方法

【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
非線形適応モデルベース制御の設計方法及び制御装置並びにプログラム
【課題】PIDのような複雑なマップを必要としない制御の体系的な設計方法及びこれを利用した制御装置並びにプログラムを提供する。
【解決手段】対象となる機械全系の物理モデルを受け、当該物理モデルを簡略化し、前記簡略化したモデルに対応する状態方程式を求め、当該状態方程式を用いて予め定められた制御系のパラメータを求めることにより当該制御系の設計を行うことを特徴とする非線形適応モデルベース制御の設計方法である。
(もっと読む)
プラント制御装置及び厚板圧延システム
【課題】対象プラントの生産性を低下させることなく、モータの過熱保護による操業停止を確実に防止できるプラント制御装置を提供する。
【解決手段】モータ2を駆動するドライブ装置3と、モータ2の速度基準を生成し、その生成した速度基準をドライブ装置3に送信するコントローラ4とを有するプラント制御装置1において、RMS値計算手段6及び加減速レート調整手段9を備える。RMS値計算手段6は、モータ2のトルク電流の実効値を計算する。加減速レート調整手段9は、RMS値計算手段6によって計算された実効値が所定の規定値を超えている場合に、上記速度基準の加減速レートを調整し、モータ2の過熱保護による操業停止を防止する。
(もっと読む)
モータ制御装置
【課題】 モデル制御系のパラメータを簡単に調整でき、しかも、モデル速度制御器から出力されるトルク指令が過大になることがなく、より高速で振動のない位置決めを実現できるモータ制御装置を提供する。
【解決手段】 モデル制御系1は、モータについての第1の慣性系の機械モデルと、負荷についての第2の慣性系の機械モデルと、モータと負荷との間のねじりトルクについてのねじりトルクモデルと、フィードバック加速度指令S10をモデルトルク指令部8にフィードバックする第1の状態フィードバック系と、フィードバック速度指令S5をモデル速度指令部5に状態フィードバックする第2の状態フィードバック系とを備えている。モデル制御系の状態方程式から得られる特性方程式が4重根を持つように演算して得たパラメータの関係式に基づいて、モデル制御系のパラメータが定められている。
(もっと読む)
インピーダンス制御パラメータの調整装置および調整方法
【課題】 インピーダンス制御の複数のパラメータを個人のスキルに依存することなく、特別な知識を有していなくても、常に最適なパラメータを調整できるようにする。
【解決手段】 パラメータ初期値算出部117と力指令印加部111と評価基準計測部112と許容値設定部113と粘性パラメータ探索部114と終了判断部115と慣性パラメータ調整部116を備え、力指令印加部11はインピーダンス制御部に対して力指令を入り切りし、評価基準計測部112は力応答の整定時間とオーバシュート量と振動回数を計測し、許容値設定部113はオーバシュート量と整定時間の許容値を設定し、粘性パラメータ探索部114は整定時間が最小となる粘性パラメータを探索し、終了判断部115は調整値と許容値を比較して処理の終了あるいは継続を判断し、慣性パラメータ調整部116はオーバシュート量と整定時間の調整値に応じて慣性パラメータを調整する。
(もっと読む)
制御パラメータ適合装置
【課題】適合データの信頼性を向上させることができる制御パラメータ適合装置を提供する。
【解決手段】電動パワーステアリングシステムの機械的な構成要素が持つ粘性摩擦及びクーロン摩擦等の動的特性の製品間のばらつきを加味して、ハンドルの自励振動等の特定の問題が最も発生しやすい条件を有してなる検証用モデルを備えた。そして当該検証用モデルに、適合された制御パラメータである適合データを与えて電動パワーステアリングシステムの動作をシミュレーションするとともに、当該シミュレーションの結果に基づき前記適合データの妥当性を検証する。これにより、量産時における製品間の動的特性のばらつきを考慮した制御パラメータの設定が可能となる。ひいては、適合データの信頼性が高められる。
(もっと読む)
機械装置の制御装置及び機械装置の特性同定方法
【課題】 モータに動力伝達部を介して被駆動部を機械的に結合したものを制御対象とするような機械装置への適用に適し、機械装置における摩擦や装置の自重のような外乱が存在しても精度良く装置特性を同定して駆動制御を実行することのできる制御装置を提供する。
【解決手段】 制御装置は、トルク指令値τMを受けるモータ10と被駆動部11との間を動力伝達部12で連結した慣性共振系を制御対象とし、該制御対象の状態量としてモータ軸角速度ωMを計測する計測手段と、前記モータ、動力伝達部、被駆動部に起因する外乱トルクを推定する外乱オブザーバ17と、推定された外乱トルクを前記トルク指令値から減算する減算部18と、前記減算部の出力及び前記モータ軸角速度ωMに基づいて前記制御対象のパラメータを同定する制御対象特性同定器15を含み、同定されたパラメータに基づいて前記トルク指令値を調整する。
(もっと読む)
電動パワーステアリング制御装置
【課題】ドライバがハンドルを切る際にはその操作感を損なわないようにしつつ、ハンドル戻し時には急な戻り感を低減して車両の収斂性を向上させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】路面反力に対するモータ速度の特性は、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法でモータを駆動する場合に比べて、従来のダンピング制御ありの場合の特性とほぼ同様に、所定の周波数帯域においてモータ速度が抑制される。一方、ハンドルトルクに対するモータ速度の特性については、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法の特性からほとんど変化がない。このように異なる2つの特性(仕様)を共に満たす制御装置を構成することで、ドライバのハンドル操作を妨げることなく車両の収斂性を向上させることが可能となる。
(もっと読む)
水車またはポンプ水車用調速制御装置
【課題】水車またはポンプ水車用調速制御装置において、発電機の負荷遮断後、ガイドベーン閉鎖特性の適正化と、軸系の回転速度および導入鉄管の水圧変動の安定性を確保する。
【解決手段】出力増減指令1による指令値と、軸回転速度19とガイドベーン9の開度の検出値との偏差を演算する制御入力演算器3の演算値を入力するPIDコントローラ4と、フィードフォワード制御要素22を設け、発電機18の負荷遮断信号を受信するフィードフォワード制御要素22によって、予め設定されたガイドベーン閉鎖特性の関数でトラッキング演算するようPIDコントローラのI(積分)演算要素6が制御され、その演算結果と、P(比例)5、D(微分)6演算要素の結果和でガイドベーン開度を制御する調速制御装置2。
(もっと読む)
繰り返して実行される作動サイクルを持つ制御対象のフィードバック制御を行うための方法および制御配列
繰り返して実行される作動サイクルを持つ配列のフィードバック制御に際しては、例えばエンジン・テストスタンドにおいては、被験体(例えばエンジン)により、前記配列の作動周波数域で共振が励振されることがたびたびあるが、これは、フィードバック制御により減衰することができる。そのために本発明により、フィードバック制御の一つの現時点の実際値rist_aktと、以前に行われたいずれか一回の作動サイクルにおける実際値に基づいて、間近に生じるシステム・ディレイを随伴しない一つの実際値を予測した一つの値とから、一つの修正後の実際値rist_modを算出して、これを制御にフィードバックする制御コンセプトが提案される。 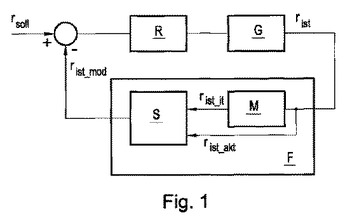 (もっと読む)
(もっと読む)
精密位置決め装置
【課題】 精密ないし微小な部品でも安定して位置決めしながら組立等の作業を行うことを可能にする精密位置決め装置を提供する。
【解決手段】 磁界に置かれたコイルを弾性案内部材により所定の方向に変位可能に支持し、該コイルに電流を流すことによってコイルを含むアクチュエータを駆動し、アクチュエータの変位により部品の位置決めを行うボイスコイルモータ5と、アクチュエータの変位を検出する変位センサ18と、変位センサで検出された変位から速度及び加速度を算出し、アクチュエータの位置、速度及び加速度と任意に設定した外力とからアクチュエータの駆動力を演算してそれに応じたコイル供給電流を出力するコントローラ6とを備える。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
位置制御装置
【課題】位置制御装置における摩擦外乱を適切に補償できるようにする。
【解決手段】移動方向信号出力部27は、移動体の移動方向を判定し、その移動方向に応じた信号を出力する。移動方向信号出力部27の一方の移動方向に応じた信号をフィルタ処理する第1フィルタ回路25と、移動方向信号出力部27の他方の移動方向に応じた信号をフィルタ処理する第2フィルタ回路26を設けて外乱相殺フィードフォワード補償器(FFC)を構成する。第1フィルタ回路25は、無駄時間回路部21と正方向フィルタ23とから構成し、第2フィルタ回路26は、無駄時間回路部22と負方向フィルタ24とから構成する。正方向フィルタ23、負方向フィルタ24を通過した出力Yp 、Ym を足し合わせてFFC指令を求め、このFFC指令をモータ(駆動源)への位置指令に足し合わせて該位置指令を補償する。
(もっと読む)
制御マップ自動構成装置
【課題】制御対象に生じ得る種々の状況を適切に認識、分類して制御マップの自動構成を行うことが可能な制御マップ自動構成装置を提供する。
【解決手段】制御マップ自動構成装置1は、入力された状態ベクトルxに特定の代表ベクトルWkを対応づけて出力する状況認識手段3と、制御パラメータPnを出力する複数の制御マップMnと、代表ベクトルWkと制御マップMnとを対応づけて、前記特定の代表ベクトルWk*に対応する制御マップMselectが出力する制御パラメータPselectを出力する制御マップ切替手段4と、複数の制御マップMnの各評価値Qnを算出する評価値算出手段6と、評価値Qnに基づいて状況認識手段3において代表ベクトルWkを増殖させるか否かおよび制御マップMnを新たに生成するか否かを判定する判定手段7と、制御マップMnの評価値Qnに基づいて制御マップMnを更新する更新手段8とを備える。
(もっと読む)
運動制御システム
運動制御システム(10)は、オペレータ入力部材(20)を有するオペレータインターフェース(13)と、オペレータ入力部材に駆動連結される制御可能な力フィードバック装置(18)とを含む。運動制御システムはまた、第2の操作パラメータの目標値(TARv)と第2の操作パラメータの実際値(ACTv)との間の制御誤差(Ec)に少なくとも部分的に関係するように第1の操作パラメータを調整することを含めて、1つ以上の可動構成要素(12)の運動を調整する制御部(14)を含むことが可能である。第2の運転パラメータの目標値は、オペレータ入力部材の運動に少なくとも部分的に基づくことが可能である。制御部はまた、制御誤差に少なくとも部分的に関係するように、および制御誤差に対するフィードバック力の導関数が少なくとも部分的に制御誤差に応じて変化するように、制御可能な力フィードバック装置を操作してフィードバック力をオペレータ入力部材に提供することが可能である。  (もっと読む)
(もっと読む)
サーボ制御装置
【課題】モータ軸の共振特性が存在する状況下において、モータ軸による軸摩擦を抑圧する補償制御が可能なサーボ制御装置を提供する。
【解決手段】サーボ制御装置が、モータ1と、モータ1のモータ軸2の回転位置を検出する回転位置検出部4と、所定値及び回転位置からモータ1へのモータトルク指令を生成する制御系5とを備え、回転位置とモータ1への印可電圧とに基づいて、外乱要素のうちのモータ軸2近傍に発生する摩擦トルクを推定し、摩擦トルクから印可電圧に加算される補償電圧を生成するオブザーバ9を備える。
(もっと読む)
変速シミュレーション装置、変速シミュレーションプログラムおよび自動車
【課題】入力指令値もしくは変速動作を制御する装置の構成要素の特性値の変動に強い自動変速機制御用の入力指令値を得る。
【解決手段】入力指令値を初期設定し(S1)、その入力指令値に変更を加えてモデルによる変速シミュレーションを行う(S2)。そのシミュレーションの出力から、その出力による変動が小さくなるように目標波形を修正する(S4)。そして、修正された目標波形を得る入力指令値を学習計算によって得る(S5)。S2に戻り処理を繰り返し、変動が所定以内になることによって、適切な目標波形が得られ、その目標波形を達成する入力指令値を得ることができる。目標波形は、ファジィ推論によっても、感度解析によって求めてもよい。
(もっと読む)
電動機制御装置
【課題】簡便な調整により、外乱抑制力の向上と負荷機械の振動抑制とを同時に実現する電動機制御装置を提供する。
【解決手段】電動機制御装置は、電動機の位置を検出する位置検出手段および入力される負荷機械または負荷機械を駆動する上記電動機の位置に対する位置参照信号と上記電動機の位置信号との偏差が小さくなるように上記電動機を制御するためのトルク指令信号を出力する位置制御手段を有する電動機制御装置において、上記負荷機械の加速度を検出する加速度検出手段と、上記電動機の位置信号と上記加速度検出手段から出力される加速度信号を用いて、上記トルク指令信号を補正し、上記負荷機械または上記電動機の振動を抑制する補正信号を出力する振動抑制手段と、を有する。
(もっと読む)
モーション習得システムおよびその制御方法
【課題】未知の実環境との安定した接触動作を確立すると共に、人間の指のようなモーションを個々に抽出,保存,再現できるようにする。
【解決手段】ロバスト性を保ちつつ制御剛性をゼロにする加速度制御を、外乱オブザーバにより各ロボットシステムのアクチュエータ1に行なう。アクチュエータ1の外乱加速度θ・・extと加速度応答θ・・resとを、モード加速度変換手段27,28によりモードクオリー行列を用いて直交座標系の非干渉モードにおける加速度外乱m・・extや加速度応答値m・・resに変換する。そして、これらの加速度外乱m・・extや加速度応答値m・・resを基に、非干渉モードの各々に対応した対象物47に対するモーションを抽出する。
(もっと読む)
1 - 20 / 30
[ Back to top ]