
Fターム[5H004JB29]の内容
フィードバック制御一般 (10,654) | 検出部(オブザーバを含む) (399) | 検出部の具体的構成 (9)
Fターム[5H004JB29]に分類される特許
1 - 9 / 9
カルマン・フィルタの処理方法、プログラム及びシステム
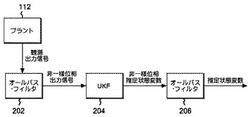
【課題】 Unscentedカルマン・フィルタにおいて、プラント特性を考慮した非一様更新タイミングに基づき、推定精度を改善する技法を提供すること。
【解決手段】 カルマン・フィルタへの入力を、分子と分母の多項式の関係が鏡像多項式の関係によって記述される、オールパスフィルタを通すことで非一様更新を実現し、ポリフェーズフィルタによるリサンプリングとは異なった演算量を抑える構成とする。次に、カルマン・フィルタによって得られた推定状態量はそのままでは位相が非一様間隔のものであるため、上記非一様化の逆変換となるフィルタリングを行う。
(もっと読む)
プロセス制御データを収集する方法および装置

【課題】プロセス制御データを収集するための方法、装置、および製造物品を開示する。
【解決手段】プロセス制御データを収集するための例示的方法は、測定されるパラメータおよび測定サンプリングレートを記述する電子デバイス記述を登録することと、その測定サンプリングレートに基づいてパラメータを測定することと、測定されたパラメータを代表するデータをデータ構造に保存することと、データの要求、データと関連付けられる状態、またはデータと関連付けられるイベントのうちの少なくとも1つに応答して、プロセス制御ネットワークを介して、データ構造内のデータを第1のプロセス制御デバイスに転送させることと、を含む。
(もっと読む)
圧力制御装置及び圧力制御方法
【課題】サーボモータにより動力伝達手段を介して作動体を動作させて受圧体に与える力を、ロードセル等を使わずに正確に制御し、機械の構成を簡単にし、信頼性を得る。
【解決手段】サーボモータ11により射出圧力を制御する電動射出成形機1の制御装置15は、電動射出成形機1の制御モデルに対して構築され射出スクリュー5が発生する力を推定するオブザーバ19と、サーボモータ11に対する電流指令値Iとパルスエンコーダ14の回転位置θとによりオブザーバ19が推定した力を入力して射出スクリュー5に作用させる力をフィードバック制御する射出圧力フィードバック制御部20とを備え、オブザーバ19は、電流指令として重畳させた振動に応じて生じる抗力が、機械インピーダンス要素を介して被駆動部に作用する力を外乱として同定した制御モデルに基づいて構成される外乱オブザーバ部を備え、被駆動部に作用する力を推定する。
(もっと読む)
繰り返して実行される作動サイクルを持つ制御対象のフィードバック制御を行うための方法および制御配列
繰り返して実行される作動サイクルを持つ配列のフィードバック制御に際しては、例えばエンジン・テストスタンドにおいては、被験体(例えばエンジン)により、前記配列の作動周波数域で共振が励振されることがたびたびあるが、これは、フィードバック制御により減衰することができる。そのために本発明により、フィードバック制御の一つの現時点の実際値rist_aktと、以前に行われたいずれか一回の作動サイクルにおける実際値に基づいて、間近に生じるシステム・ディレイを随伴しない一つの実際値を予測した一つの値とから、一つの修正後の実際値rist_modを算出して、これを制御にフィードバックする制御コンセプトが提案される。 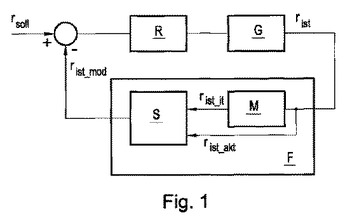 (もっと読む)
(もっと読む)
制御装置及び制御方法
【課題】制御上の無駄時間が生じていたとしても、簡易な構成で、制御を開始してから制御対象を目標値に設定するまでの整定時間を短縮することができる制御装置及び制御方法を提供する。
【解決手段】制御装置は、第1の温度センサ2から検出された第1の値を取得する第1の取得部12と、第1の温度センサ2に比して制御対象物の近くに配置された第2の温度センサ3から検出された第2の値を取得する第2の取得部13と、前記第2の値と予め設定された目標値とを比較した比較結果に応じて、入力値を前記第1の値と前記第2の値とで切り替える切り替え部17と、目標値と入力値の偏差に基づいて前記制御対象物の状態を制御するPID制御部16と、を備える。
(もっと読む)
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
多チャンネルフィードバックを有する閉ループ制御方法を説明する。該方法では、サンプリングレートfAで閉ループ制御変数xをサンプリングすることにより決定されるフィードバック変数r1、および、期間TSにわたる閉ループ制御変数xを平均化することにより決定される、さらなるフィードバック変数r2を、ガイド変数wとそれぞれ別々に比較する。処理において決定される制御エラーe1,e2のそれぞれを、個別閉ループ制御出力変数m1,m2をそれぞれ生成する分離されたコントローラ31,32に入力する。最後に、個別閉ループ制御出力変数m1,m2から生成される閉ループ制御出力変数mを、閉ループ制御変数xがガイド変数wを追従するように、閉ループ制御変数xを調節するために用いる。 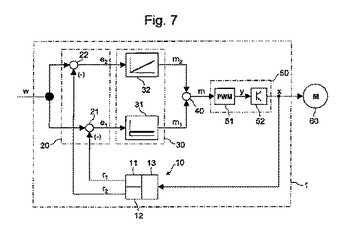 (もっと読む)
(もっと読む)
モーションキャプチャシステムを用いた閉ループフィードバック制御
モーションキャプチャシステムを用いた制御可能装置の閉ループフィードバック制御のためのシステムおよび方法が開示される。一実施例では、システムは、1つ以上の制御可能装置が制御体積内で作動している際に、1つ以上の制御可能装置の1つ以上の運動特性を測定するよう構成されたモーションキャプチャシステムを含む。プロセッサは、モーションキャプチャシステムから測定された運動特性を受信し、測定された運動特性に基づいて制御信号を決定する。位置制御システムは制御信号を受信し、所望の位置状態を維持または達成するために、1つ以上の制御可能装置の少なくとも1つの運動特性を連続して調節する。制御可能装置は受動的な逆反射マーカを装備していてもよい。モーションキャプチャシステム、プロセッサ、および位置制御システムは、完全な閉ループフィードバック制御システムを備える。  (もっと読む)
(もっと読む)
モータの負荷イナーシャ推定方法
【課題】 モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
(もっと読む)
加速度センサを用いた制御装置及び調整装置
【課題】被駆動体の加速度に関する情報を用いて、駆動体の制御ゲイン又は時定数を適切かつ定量的に設定可能な制御装置、及び制御ゲイン又は時定数を調整する機能を備えた調整装置を提供する。
【解決手段】制御装置10は、第1加速度センサ6による被駆動体3の加速度検出値を用いて、速度指令作成部14及び電流指令作成部16の制御ゲインを補正する制御ゲイン補正部18を有する。
(もっと読む)
1 - 9 / 9
[ Back to top ]