
Fターム[5H004KC34]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | モデルを有するもの (165) | モデル規範型 (18)
Fターム[5H004KC34]に分類される特許
1 - 18 / 18
設計装置及び設計プログラム
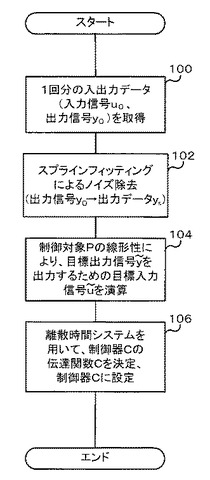
【課題】出力信号に含まれているノイズに係わらず、簡単な計算により最適な制御器を設計する。
【解決手段】入力信号u0を少なくとも1回入力して、制御対象Pから出力された出力信号y0を少なくとも1回計測することにより、少なくとも1回分の入出力データ(入力信号u0及び出力信号y0)を計測する。さらに、出力信号y0に対してスプラインフィッティングを行い、データを平滑化して、出力信号y0から雑音vを除去した出力データysを得る。さらに雑音vを除去した出力データysを線形独立なベクトルの組とし、制御対象Pの線形性に基づいて、目標出力信号y~との線形結合係数列θを算出し、当該線形結合係数列θを用いて、入力信号u0から目標入力信号u~を算出する。算出された1組の目標入力信号u~及び目標出力信号y~と参照モデルMに入力される参照信号r~との偏差e~から制御器Cの伝達関数を決定することにより、制御器Cを設計する。
(もっと読む)
規範応答演算装置およびそれを用いた車両用制駆動力制御装置

【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
差し迫った制御不安定性の検出
【課題】対象物に刺激を与えるシステムにおいて、差し迫った制御不安定性を検出してこれを回避する方法を提供する。
【解決手段】システム110は、刺激エフェクター120により対象物100に刺激が与えられている間にセンサー130により対象物の発振を示すシステムパラメータを表すパラメータ信号OSCを測定する。制御装置140はパラメータ信号の選択された周波数帯における支配的なトーンの最大振幅を監視し、最大振幅が指定された期間にわたって持続する場合、制御不安定性を回避する信号CSを刺激エフェクター120に与える。
(もっと読む)
適応制御装置の設計方法
【課題】安定したプロセス制御を実現する適応制御装置の設計を速やかに行うことのできる適応制御装置の設計方法を提供することを目的とする。
【解決手段】プラント1、PI制御器3、適応制御器5の伝達関数を与える第1工程と、PI制御器3と適応制御器5とを合わせた制御系全体の伝達関数を求める第2工程と、制御対象の入力側に制御系外部から与えられる外乱を想定したときに、該外乱から出力までの伝達関数を、制御系全体の伝達関数とプラント1の伝達関数とを用いて表現する第3工程と、規範モデルを設定する第4工程と、規範モデルと第3工程で求めた伝達関数とによる部分モデルマッチングにより、PI制御器3における比例ゲイン及び積分ゲイン並びに適応制御器5の時定数を決定する第5工程とを有する適応制御装置の設計方法を提供する。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
プラントの制御装置および火力発電プラントの制御装置
【課題】プラントの特性が未知の場合、ならびにプラントの特性変化や制御仕様変更に対して、評価関数を自動的に調整することにより、常に望ましい操作方法の学習を可能とするプラント制御装置を提供する。
【解決手段】学習対象であるプラントの特性を模擬するモデルを操作した結果得られるモデル出力及び評価関数に基づいて、評価関数パラメータを適切に調整し制御対象の特性に適した評価関数を計算する。計測信号データベース、プラントに操作信号を与えた時の計測信号値を推定するモデル、計測信号に該当するモデル出力が目標値を達成するように、操作信号に該当するモデル入力の生成方法を学習する操作信号学習手段、操作信号学習手段がモデルを操作した結果に対する、評価関数値を計算する評価関数計算手段、評価関数を計算する際に用いる評価関数パラメータを調整する評価関数調整手段を備える。
(もっと読む)
制御パラメータ調整方法および制御パラメータ調整プログラム
【課題】一組の試験データから直接に制御パラメータを決定できるようにする。
【解決手段】制御対象11に開ループで操作量u(t)を与えて制御する制御装置12の伝達関数C(x)を決定する制御パラメータxを、目標値r(t)に対する制御対象11の制御量y(t)の応答が参照モデルMに近づくように調整する際に、制御対象に時刻とともに変化するテスト入力信号列u1(t)を与えて制御量の時間変化であるテスト出力信号列y1(t)を採取し、誤差‖Mr(t)−PC(x)r(t)‖を変形した評価関数Jを最小にするように制御パラメータxを決定する。評価関数Jは、y1(t)=Pu1(t)に注意すると、未知の制御パラメータxで表される制御装置12の伝達関数C(x)と、既知の伝達関数M、テスト入力信号列u1(t)およびテスト出力信号列y1(t)とで表されて、J=‖Mu1(t)−C(x)y1(t)‖となる。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
モータ制御装置と制御定数調整方法
【課題】多軸サーボシステムにおいて、加減速動作時においても、所望の軸の応答を規範モデル部と同等にすることができるモータ制御装置を提供する。
【解決手段】速度指令とモータ速度の速度偏差からトルク指令を生成する速度制御部(102)とトルク指令に基づいてモータを駆動する電流制御部(103)とを備えた複数のモータ制御部(10)と、外部装置と内部の入出力処理を行なう入出力処理部(13)と、を備えたモータ制御装置において、速度指令とモデル速度のモデル速度偏差からモデルトルク指令を生成する速度制御モデル部と前記電流制御部の応答を模擬する電流制御モデル部とモデル速度を生成する積分器とを備える規範モデル部(11)と、モデルトルク指令の絶対値の積分値とモータ制御部から選んだ少なくとも一つのトルク指令の絶対値の積分値から速度制御部の制御定数を調整する制御定数調整部(12)と、を備えた。
(もっと読む)
制御システムの構築方法及び制御システム
【課題】逆モデルに依らず、安定したフィードフォワード制御系を構築することが可能な技術を提供する。
【解決手段】本発明では、伝達関数P(z-1)を、遅延演算子z-1の多項式N(z-1),D(z-1)を用いて、P(z-1)=N(z-1)/D(z-1)で表現可能な制御対象を制御するに際し、次の方法で、制御システムを構築する。即ち、規範モデルM(z-1)を、伝達関数P(z-1)の分子N(z-1)を含む関数M(z-1)=N(z-1)・L(z-1)に設定して、所望の規範モデルM(z-1)に対応する関数L(z-1)を導出する。そして、フィードフォワード操作量uff(i)を、関数L(z-1)及び伝達関数P(z-1)の分母D(z-1)を含む式Uff(i)=D・L・r(i)に従って、算出するように、フィードフォワード制御系を構築する。このようにして、本発明では、逆モデルP-1を用いずに、フィードフォワード制御系を実現する。
(もっと読む)
ΔΣ変調アルゴリズムを用いてプラントを制御する制御装置
【課題】ΔΣ変調アルゴリズムを用いて、所与のプラントを良好な精度で制御する。
【解決手段】モデルパラメータを用いてモデル化された制御対象を制御する制御装置は、モデルパラメータを同定する同定器と、該同定器に接続されたコントローラであって、制御対象の出力が目標値に収束するように、前記モデルパラメータを用いて参照入力を算出するコントローラと、該コントローラに接続された変調器であって、該参照入力に、ΔΣ変調アルゴリズム、ΣΔ変調アルゴリズムおよびΔ変調アルゴリズムのうちの1つを適用して、制御対象への制御入力を算出する変調器と、を備える。同定器は、制御対象の出力および参照入力に基づいて、モデルパラメータを同定する。同定器は、参照入力に基づいてモデルパラメータを算出するので、モデルパラメータが振動的になることを防止することができる。
(もっと読む)
制御装置、制御パラメータの調整装置、制御パラメータの調整方法およびプログラム
【課題】ユーザによる学習係数の調整作業を不要にすることを目的とする。
【解決手段】制御量の時系列データおよびPID制御パラメータを、状態ベクトルとしてデータベース6に蓄積し、新たな状態ベクトルが与えられると、蓄積されたデータベース6の状態ベクトルに基づいて、局所モデルとして新たな状態ベクトルに対応するPID制御パラメータを生成してPID制御器3のPID制御パラメータを調整するとともに、学習係数を用いて、制御誤差が小さくなるようにPID制御パラメータを修正してデータベース6に蓄積し、前記学習係数を、予め定めた算出式によって算出するようにしている。
(もっと読む)
適応制御装置、画像形成装置、およびプログラム
【課題】 不安定零点を有しない離散時間系の伝達関数モデルで表される制御対象を同定するにあたり、同定により得られるモデルにも不安定零点が生じないようにする。
【解決手段】 用紙搬送を制御する制御部57では、適応制御手法が適用された2自由度系の制御系が構築されている。適応パラメータ演算部88は、制御対象の離散時間系伝達関数モデルP(z)を同定し、同定モデルP^(z)を得る。フィードフォワード制御部87は同定モデルP^(z)の逆モデル1/P^(z)を伝達関数としてフィードフォワード操作量を生成する。離散時間系伝達関数モデルP(z)は、分子がb(z+1)4で表されるものであるが、適応パラメータ演算部88は、このP(z)の各係数を同定(推定)するにあたり、分子を多項式展開して各次数毎に係数を推定せず、分子をそのままの形、即ち、零点(ここでは−1)を固定したまま、一つの未知の係数bを推定する。
(もっと読む)
リニアソレノイドの電流制御装置
【課題】リニアソレノイドの電流制御装置において、工数やコストをかけずに機差バラツキ及び特性変動を補償する。
【解決手段】リニアソレノイドの電流をフィードバック制御する際、規範モデルからリニアソレノイドの時定数を考慮した理想出力値を算出する。この理想出力値と電流センサで検知した実出力値との差から同定誤差を算出し、この値が0になるよう適応機構に基づき制御定数を決定する。決定した制御定数をフィードバック演算に使用することで、電源電圧や環境温度がどのような状態においても一定の応答性を実現し、さらに、機差バラツキを補償する。
(もっと読む)
気体バネ式除振装置及び該装置の制御方法
【課題】流量制御型弁を用いて排気流量を抑制するという長所を維持しつつ、従来よりも応答性の高い高精度な制御が可能な気体バネ式除振装置及びその制御方法を提供する。
【解決手段】スプール弁及び圧力微分計を備えた除振装置において、スプール弁の不感帯での動特性を向上させるために、圧力微分値のフィードバック値が、入力電圧と出力流量との関係がゼロ点を通る線形性を備えた規範モデルGrefに追従するような制御を行い、スプール弁の非線形性を補償する。
(もっと読む)
スライディングモード制御装置及び適正化方法
【課題】 電磁駆動弁などに対する外乱や経時変化、あるいは機差に伴うスライディングモード制御における不安定化を防止する。
【解決手段】 筒内圧外力Fclとスプリングによるポペット弁の中立位置ずれ量Dmpとの両方に応じて、操作切り替え点である吸引電流通電開始変位Aを変更する(S100)ことにより、適切な吸引電流通電開始変位Aを設定して、スライディングモード制御における不安定化を防止することができる。
これと共にブレーキ電流終了変位も筒内圧外力Fclと中立位置ずれ量Dmpとにより変更しても良い。
(もっと読む)
モデル予測制御装置
【課題】 操作に応じて予測演算を高速化し、制御対象に応じて制御の安定化を図る。
【解決手段】 モデル予測制御装置10の最適操作量決定部3は、制御対象20の動特性モデルを用いて最適操作量候補について制御量を予測し、最適操作量を決定する。最適操作量精度設定部4は、操作の種類ごとに最適操作量の精度を設定して、最適操作量の検索回数を制限する。時定数変化観測部6により制御対象20の時定数変化が観測されると、時間および区間設定部8は、時定数変化に応じてサンプリング時間と予測区間と制御区間との少なくとも一つを変更して制御を安定化させる。
(もっと読む)
1 - 18 / 18
[ Back to top ]