
Fターム[5H004KD67]の内容
フィードバック制御一般 (10,654) | 制御部 (227) | 遺伝的アルゴリズムを用いるもの (30)
Fターム[5H004KD67]に分類される特許
1 - 20 / 30
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
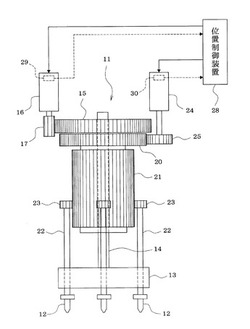
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
制御パラメータ調整装置及び制御パラメータ調整方法

【課題】簡便で、かつ、わかりやすい形で、フィードバック制御系の制御パラメータをより望ましい状態に調整する。
【解決手段】導出部20は、PID制御系の制御パラメータを含む制御則に従う目標値と操作量と制御量との関係式に基づいて、目標値と等価であり、操作量の時系列データと制御量の時系列データとの線形結合である一般化出力を導出する。参照モデル設定部21は、目標値を入力とし制御量を出力とする参照モデルの入力に対する応答が所望のものとなるように、参照モデルの伝達関数を設定する。最適化部22は、フィードバック制御系における実際の制御量が参照モデルの出力に追従するように、最適化手法を用いて一般化出力における線形結合の各係数を調整することにより、PID制御系の制御パラメータを最適化する。
(もっと読む)
制御システム
【課題】遺伝的アルゴリズムを利用して最適な制御値を求めることができる制御システムを提供することを課題とする。
【解決手段】制御対象システムを制御するための制御値を出力する制御システムであって、制御対象システムに対する最適な制御値を生成する最適制御装置を有し、最適制御装置は、遺伝的アルゴリズムを実施した回数が設定された実施回数になるまで、遺伝的アルゴリズムを実施する毎に初期個体を発生し、その発生した初期個体を用いて遺伝的アルゴリズムを実施して適応度の高い個体を探索し、遺伝的アルゴリズムを実施した回数が実施回数になった場合、その実施回数分の遺伝的アルゴリズムでそれぞれ探索された個体の中から最も適応度の高い個体を選択し、その選択した個体に基づいて制御対象システムに出力する制御値を生成することを特徴とする。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法
【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
多目的最適解集合算出装置及び多目的最適解集合算出方法及び多目的最適解集合算出プログラム
【課題】所定の駆動基準を充足する全体最適解の集合を算出すること。
【解決手段】複数の駆動状態の複数の組み合わせ毎に基づいて算出されたトレードオフ関係にある複数の目的関数の組み合わせを最小化又は最大化する設計変数の部分最適解の集合と、複数のステップから構成されステップ毎に前記駆動対象の駆動条件が異なる駆動基準のステップ毎の駆動条件の値を入力する入力部1と、複数の駆動状態の複数の組み合わせ毎に抽出される部分最適解に基づいて、駆動状態の範囲内の部分最適解を予測可能な達成値マップを作成する達成値マップ作成部201と、駆動状態の項目毎に作成される達成値マップから達成値を抽出する達成値抽出部202と、達成値を前記駆動基準のステップ毎に積算して算出される総和達成値から全体最適解の集合を算出する全体最適解算出部21とを備える。
(もっと読む)
アクティブフィードバック制御装置、方法、及びプログラム
【課題】制御性能を低下させることなく、同定対象の動特性を表わすパラメータを同定対象の動作中にオンライン同定する。
【解決手段】アクティブフィードバック制御装置28は、外乱が入力される制御対象12、制御対象12を駆動するアクチュエータ14、制御対象12の状態を検出するセンサ16を含む同定対象18の動特性を表わすパラメータと、センサ16からの検出信号と、に基づいて、制御対象12が目標の状態となるような制御信号を生成して出力するコントローラ20と、平均値が略ゼロとなる乱数を発生させる乱数発生部22と、コントローラ20から出力された制御信号と、発生させた乱数を制御信号に乗算したノイズ付加制御信号と、を加算してアクチュエータ14に出力する加算部24と、同定対象18の動特性を表わすパラメータを制御対象12の動作中にオンライン同定し、同定したパラメータをコントローラ20に出力する同定部26と、を備える。
(もっと読む)
フィードフォワード量調整支援装置およびフィードフォワード量調整支援プログラム
【課題】容易にフィードフォワード量を調整できるようする。
【解決手段】第1の波形表示領域20に表示されるフィードフォワード量である補正操作量を、スライダバー22〜27を用いて、そのレベルおよび区間を調整することにより、調整された補正操作量に応じた制御量のシミュレーション波形が、第2の波形表示領域に表示され、所望の制御応答が得られるように、補正操作量を調整することができる。
(もっと読む)
コジェネレーションシステム並びにその運転計画作成方法および運転計画作成装置
【課題】好適な運転計画を少ない計算量で立てる。
【解決手段】発電装置と、排熱を回収して蓄熱する蓄熱装置とを備えるコジェネレーションシステムの運転計画作成装置に、未来の電力使用量予測値および未来の熱使用量予測値を記憶する予測量記憶部51と、時間帯ごとの発電量を表す遺伝子からなる個体で表されるように発電装置を運転したときのエネルギー削減量を電力使用量予測値および熱使用量予測値に基づいて求める適応度算出部52と、個体の群である第1世代を生成する個体群生成部53と、少なくとも一部の遺伝子が電力使用量予測値に対応する負荷追従個体を生成する負荷追従個体生成部54と、前世代の個体の群から新世代の個体の群を遺伝的アルゴリズムでエネルギー削減量が大きくなるように生成する交配部55と、最後の世代の個体群のうちエネルギー削減量が最も大きい個体を運転計画とする運転計画作成部56と、を備える。
(もっと読む)
予測制御方法および予測制御システム
【課題】制御対象の出力である被制御量が複数ある多目的制御問題において、制御調整者の経験や試行錯誤による調整作業の労力を低減し、制御対象の特性変化にも適合する。
【解決手段】制御対象の動的モデルを使い、未来の制御対象の出力である被制御量を予測し、それらの予測値がそれぞれの目標値に近づくように操作量を決定する予測制御方法である。複数の被制御量に対する目標値である希求水準の入力を受け入れて希求水準を設定し、希求水準に近い最適解を算出し、最適解を表示し、最適解が所定の基準を満たしていない場合に希求水準を変更する入力を受け入れて希求水準の設定を変更し、上記ステップを繰り返し、最適解が所定の基準を満たしている場合における最適解となる操作量を決定する。
(もっと読む)
最適部分波形データ生成装置及び方法ならびにロープ状態判定装置及び方法
【課題】最適化された可変長の特徴部分波形集合を生成する最適部分波形データ生成装置を提供する。
【解決手段】最適部分波形データ生成装置は、波形データにおいて異常が疑わしい箇所付近の複数のピークを検出するピーク検出ユニットと、前記複数のピークから最良のピークを選択するピーク選択ユニットと、前記最良にピークについて複数の特徴部分波形を生成する部分波形生成ユニットと、遺伝的アルゴリズムを用いて前記複数の特徴部分波形を最適化することにより可変長の最適部分波形データを生成する最適化ユニットと、を具備する。
(もっと読む)
PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法
【課題】PIDコントローラが、精度良くプロセスを制御できるようにする。
【解決手段】チューニング装置100では、コントローラ10とプロセス20から構成される実際のシステムの操業データを利用して、仮想のコントローラ51と仮想のプロセス52のモデル化を行い、そして、得られたプロセス52のモデルを用いて、コントローラ51の最適な制御パラメータを算出し、その値を参考に、実際のコントローラ10のチューニングを行う。
(もっと読む)
ファジィ制御装置、プラントシステム、および、ファジィ制御方法
【課題】制御ルールをもとにファジィ制御を行うプラントシステムにおいて、制御精度の向上、および、制御ルールの調整期間の短縮化をすること。
【解決手段】ファジィ制御装置13は、制御ルール空間から制御が悪化する可能性の有る悪化制御ルール空間を決定する悪化制御ルール空間決定機構7と、悪化制御ルール空間から、全プラントに対する制御ルールを示す1本の遺伝子を作成する制御ルール抽出機構8と、制御ルール抽出機構8が絞り込んだ制御ルールに基づいて各プラントを制御した制御結果を、所定の評価関数で評価する評価機構4と、評価機構4の評価結果に基づいて、各プラントの制御中に、制御ルール抽出機構8が作成した遺伝子を遺伝的アルゴリズムにより最適化する遺伝的操作機構10と、を有する。
(もっと読む)
状態推定システム
【課題】観測データに含まれるノイズや不要なデータを除去して的確な入力情報のみをニューラルネットワークに適応可能とし、教師データへのマッチング精度や計算速度を向上させる。
【解決手段】状態推定システム1は、NNS2への前処理部として、観測データを独立成分分析するICA部5と主成分分析するPCA部6とを備え、ICA部5、PCA部6、NNS2への入力パターンを適応的に決定するGA部7を備えている。ICA部5は観測データから電気的・機械的なノイズ成分を除去した原信号を推定してNNS2へ入力し、PCA部6はICA部5では把握しきれない非線形な部分での不要なデータを除去し、誤差を低減した代表的な特性データをNNS2へ入力する。これにより、NNS2への入力情報を的確な情報とすることができ、NNS2における教師データへのマッチング精度や計算速度を向上させることができる。
(もっと読む)
制御パラメータを探索するためのプログラム
【課題】内燃機関などの制御において最適な制御パラメータを探索する。
【解決手段】所与の制御パラメータに応じて、制御パラメータにより実現される出力を示す制御対象につき、制御対象の出力が最も大きくなる制御パラメータを複数の探索サイクルで探索する。所定のアルゴリズムにより探索サイクルごとに前記制御パラメータを提供し、制御パラメータに所定周期の周期関数および前回の探索サイクルで求められた修正値を加えて制御対象への入力パラメータとし、入力パラメータに応じて制御対象から得られる出力に周期関数を乗算し、その値の積分値に基づいて探索が収束に向かうよう制御パラメータを修正するための修正値を求める。制御対象の出力を極大とする入力パラメータを探索して探索サイクルを繰り返し、制御対象の出力がもっとも大きくなる入力パラメータを抽出する。
(もっと読む)
制御パラメータの自動適合システム
【課題】実機を用いてシミュレーションモデルの近似誤差を排除しつつ、実機の使用による学習時間の増加や特性のバラツキ・ドリフトによる影響を抑制し、良好な最適パラメータを高速且つ効率的に得る。
【解決手段】自動適合システムは、実機を自動運転して評価値を算出し、学習演算部50で多目的遺伝的アルゴリズムを用いて制御パラメータを最適化する。学習演算部50は、個体の適合度を算出する適合度算出部52と、親個体を選択する際に、適合度が同等の場合、他の個体との粗密の度合いに応じた指標を用いて解の優劣を判定する親選択部53と、親個体から子個体を生成させる世代交代部54と、子個体を選択的に複数回評価する子個体評価部55と、次世代に保存する個体を選択する生存選択部56とを有し、実機の使用による学習時間の増加や特性のバラツキ・ドリフトの影響を抑制し、良好な最適パラメータを高速且つ効率的に得る。
(もっと読む)
車両用空調装置、車両用空調装置の制御方法および制御装置
【課題】特定状況に対応する所定の設定操作を行う推薦確率を算出する確率モデルの構築に用いた複数の学習データのうち、その特定状況に関する学習データのみを削除し、残りの学習データを別の学習に利用できる車両用空調装置およびその制御方法を提供する。
【解決手段】車両用空調装置(1)は、複数の状態情報をそれぞれ学習データとして記憶する記憶部(61)と、確率モデルを構築する学習部(66)と、算出した推薦確率に応じて、乗員の設定操作に関連する設定情報等を、所定の設定操作となるように修正する(64)と、修正された設定情報等にしたがって空調制御を行う空調制御部(65)とを有する。学習部(66)は、複数の学習データを用いて確率モデルを構築する確率モデル構築手段(663)と、構築された確率モデルに学習データを入力し、得られた推薦確率が第1の閾値以上のとき、その学習データを削除する学習情報整理部(666)を有する。
(もっと読む)
制御パラメータの自動調整装置
【課題】制御パラメータを精度良く最適化し、かつ、遺伝的アルゴリズムによる学習速度を向上させることが可能な車両制御における制御パラメータの自動調整装置を提供する。
【解決手段】制御パラメータの自動調整装置1、5は、遺伝的アルゴリズムの手法を用いて制御パラメータP1〜Pnの最適化を行って制御パラメータの最適値P1suit〜Pnsuitを出力する処理部2、6を備え、処理部2、6は、制御パラメータP1〜Pnを遺伝子として含む個体Ikの適合度Qkを算出する適合度算出手段22、62と、複数の個体Ikからなる個体群の中から一部の個体Ikを親個体Ia、Ib、Icとして選択する親選択手段24、64と、選択された親個体Ia、Ib、Icから遺伝的操作により子個体Ik*を生成させる世代交代手段25、65とを有し、最良の適合度Qkを有する個体Ikに含まれる制御パラメータを最適値P1suit〜Pnsuitとする。
(もっと読む)
プラントの制御装置及びプラントの制御方法
【課題】本発明はプラントの制御を行う複数の操作端の動作速度にばらつきがある場合でもプラントを良好に制御できるプラントの制御装置を提供することにある。
【解決手段】本発明のプラント制御装置は、プラントの制御特性を模擬するモデルと、プラントに対する操作信号を演算する操作信号生成部と、制御パラメータを含む制御ロジックデータを保存する制御ロジックデータベースと、プラントを操作する操作端の操作端仕様データを保存する操作端仕様データベースと、過去の操作信号を保存する操作信号データベースと、過去の計測信号を保存する計測信号データベースと、学習パラメータの初期値の決定と学習パラメータを更新する機能を持つ学習条件決定部と、学習パラメータの制限値を拘束条件としてモデルを用いてプラントの操作方法を学習する学習部と、学習した学習情報データを保存する学習情報データベースを備えるように構成した。
(もっと読む)
パラメータ最適化装置
【課題】多次元の探索空間内におけるパラメータの最適値の探索においても、少ない評価回数で最適解を得ることが可能なパラメータ最適化装置を提供する。
【解決手段】パラメータ最適化装置1は、探索空間S内に最適値算出対象のパラメータを要素とする複数の個体を生成させる初期化手段2と、試行により個体の評価値Qを算出する評価値算出手段3と、複数の個体の中から評価値が悪い個体を選択する単点選択手段6a、6bと、単点選択手段により選択された個体に含まれるパラメータを評価値が良い個体に含まれるパラメータに所定の割合αで近づける個体変位手段7a、7bと、終了判定条件を満たしたと判定すると良い評価値を有する個体に含まれるパラメータを最適値として出力する終了判定手段4とを備え、評価値算出手段3は、個体変位手段7a、7bにより変位された個体が送られてきた場合にはその個体についてのみ評価値を算出する。
(もっと読む)
マルチエージェント型制御装置およびマルチエージェント型制御プログラム
【課題】進化的手法によるマルチエージェントを用いた学習により制御則を最適化することが可能なマルチエージェント型制御装置を提供する。
【解決手段】マルチエージェント型制御装置では、リスト構造に従って、エージェントを順次選択しつつ(S106)、所定期間ずつ、選択されたエージェントに対応する制御演算要素を使用して、制御信号を算出させ(S108)、算出された制御信号により被制御対象を駆動し(S110)、駆動後に観測された制御対象量に応じて選択されたエージェントの評価値の更新を行う(S112)。さらに、更新された評価値に基づいて、エージェントの分裂および消滅処理が行なわれる(S114,S116)。
(もっと読む)
1 - 20 / 30
[ Back to top ]