
Fターム[5H004MA39]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | IOインターフェイス (16)
Fターム[5H004MA39]に分類される特許
1 - 16 / 16
電動機器のシステム設計支援装置
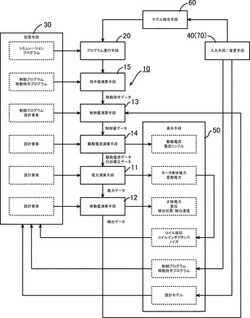
【課題】総合的に電動機器全体のシステムの設計を行なうことが難しい。
【解決手段】システム設計支援装置は、解析手段10と、プログラム実行手段20と、記憶手段30と、入力手段40と、動作結果と設計要素を選択的に一覧表示する表示手段50と、システム設計モデルを有機的に結合させるモデル結合手段60と、設計要素を調整または変更する変更手段70と、を備える。解析手段10は、リニアモータ6の変動推力Frを減じた推力Fmを演算する推力演算手段11と、変位δを減じた検出位置Xiと検出速度Viとを演算する移動量演算手段12と、位置と速度の誤差を補正した移動指令に従う制御量Hcを演算する制御量演算手段13と、制御量Hcに対応する電流振動Irを減じた駆動電流Iiを演算する駆動電流演算手段14と、指令位置Pjと指令速度Vjを演算する指令値演算手段15と、を含んでなる。
(もっと読む)
制御装置

【課題】離散時間系の制御対象モデルを用いて、所定の拘束条件が複数のモデルパラメータ間に存在する制御対象や、1次遅れなどの遅れ特性を有する制御対象を制御する場合において、制御精度および制御の安定性を向上させることができる制御装置を提供する。
【解決手段】制御装置1は、ECU2を備える。ECU2は、2つのモデルパラメータα,1-αを含む制御対象モデルを整理し、モデルパラメータαが乗算されていない項および乗算されている項を制御対象モデルの左辺および右辺にそれぞれ振り分けるとともに、左辺を合成信号値W_actとし、右辺を推定合成信号値W_hatとしたときに、合成信号値と推定合成信号値との間の同定誤差eid'が最小となるように、モデルパラメータαの同定値αidをオンボードで算出し、この同定値αidと制御対象モデルから導出された制御アルゴリズム(式(34),(35))とを用いて、空燃比補正係数KAFを算出する。
(もっと読む)
高効率サーボアクチュエータ及び励磁ドライバを実現するためのシステム、方法、及び装置
【課題】高効率サーボアクチュエータ及び励磁ドライバを実現するためのシステム、方法、及び装置を提供すること。
【解決手段】本発明の例示的な一実施形態によれば、アクチュエータ(216)を制御するための方法が提供される。この方法は、基準信号(204)を生成するステップと、基準信号(204)に少なくとも部分的に基づいてスイッチト駆動信号(207)によりアクチュエータ(216)を操作するステップと、スイッチト励磁信号(228)を生成するステップと、スイッチト励磁信号(228)に関連付けられたフィードバック(236)に少なくとも部分的に基づいて基準信号(204)を制御するステップとを含むことができる。
(もっと読む)
二重化用ユニット
【課題】上位制御システムの機能に容易に、安価に対応できる二重化用ユニットを実現する。
【解決手段】取付けパネルに設けられた第1の中継プリント基板と、第1の中継プリント基板の一方の端縁に設けられ上位制御システムからの第1の信号ケーブルの雌コネクタがコネクタ接続される第1の信号ケーブル用雄コネクタと、第1の中継プリント基板の他方の端縁に設けられ第1の中継プリント基板を介して第1の信号ケーブル用雄コネクタと電気的に接続され且つ入出力カードに電気的に接続される第1の入出力カード中継コネクタと、取付けパネルに設けられた第2の中継プリント基板と、第2の中継プリント基板の一方の端縁に設けられ上位制御システムからの第2の信号ケーブルの雌コネクタがコネクタ接続される第2の信号ケーブル用雄コネクタと、第1の中継プリント基板と第2の中継プリント基板とを電気的に接続する電気接続手段と、を具備する二重化用ユニットである。
(もっと読む)
電空コントローラにおいて駆動値の変更を制限する方法および装置
電空コントローラにおいて駆動値の変更を制限する例示の方法および装置が開示される。開示する例示の方法は、制御信号およびフィードバック信号を受信することと、制御信号およびフィードバック信号から駆動値を算出することと、駆動値と以前の駆動値との差異が電空コントローラのスルー限界よりも大きいか否かを決定することと、スルー限界に基づいて算出された駆動値を変更することとを含む。 (もっと読む)
プロセス制御のための近似的な計算を実行しうるプロセス制御システム
【解決手段】本発明の方法およびシステムにおいては、プロセス条件の参照式とプロセス制御用の変数から、プロセス条件の参照値を表す信号を生成し、他方、プロセス条件の参照式を大まかに模したプロセス条件の近似式、この近似式に現れる各変数に係る係数、およびプロセス制御用の変数から、プロセス条件の近似値を表す信号を生成する。プロセス条件の近似値を表す信号は、制御室のワークステーションにおいて、プロセス条件の参照値を表す信号と比較し、この結果に基づいて、プロセス制御システムを調整する。プロセス条件の近似式に現れる各変数に係る係数を調整した場合には、この調整済みの係数を、制御ネットワークを経由して、プロセストランスミッタに送る。この外、プライマリエレメントやプロセストランスミッタ等のプロセス制御システムを構成するハードウエアのパラメータを調整することもできる。 (もっと読む)
制御システム
【課題】 多用されるパラメータ項目とほとんど使用されないパラメータ項目が混在する場合でも目的とするパラメータをスムーズに設定できる制御システムを提供する。
【解決手段】 パラメータ項目が表示される表示部と、この表示部に表示されたパラメータ項目を所望の内容に設定するユーザ・インターフェイスとを備え、このユーザ・インターフェイスで設定された内容に基づいて制御対象を制御する制御システムにおいて、
重要度に基づいてパラメータ項目が分類されたテーブルと、
このテーブルを参照して重要度を参照し、前記表示部に表示させるパラメータ項目を決定する項目テーブル処理部と、
前記表示部にパラメータ項目を表示する命令を出力する表示処理部と、
前記項目テーブル処理部に前記ユーザ・インターフェイスで設定された内容を通知すると共に、前記表示処理部に前記表示部に表示するパラメータ項目を命令するマイクロプロセッサと
を備える。
(もっと読む)
プラントの制御装置
【課題】 偏差に基づく補償動作の遅れを補い、目標値の変動に遅れなく追従し、応答性を向上させる。
【解決手段】 設定された目標値と制御量との偏差に基づいて、フィードバック制御するプラントの制御装置30であって、バルブ13に入力されるバルブ開度Vと制御対象から出力される流量fとの入出力特性をあらかじめ記憶し、この入出力特性に基づき、目標値に対応するバルブ開度Vを特定するとともに、目標値が変動するタイミングにおいて、変動する目標値から特定されるバルブ開度Vをバルブ13に入力するフィードフォワード制御手段と、を備える構成としてある。
(もっと読む)
フィードバック制御ゲインの設定方法及び設定支援プログラム
【課題】非反証制御の考え方をオフラインでの制御系設計に適用し、制御ゲインの最適値を計算によって求め得るようにして、設定の容易化を図るとともに、多入力多出力系にも適用可能な画期的な方法を提供する。
【解決手段】制御対象(プラント)Pにステップ入力等を加えたときの入出力応答データを少なくとも1つ採取する(ステップS1)。このデータに基づいて所定数以上の仮想の入出力応答データを生成し(S2,S3)、これらをそれぞれ反証演算式に代入してパラメータ空間に所定数以上の非反証領域を規定する(S4)。反証演算式を線形制約式とすることで、所定数以上の非反証領域の積集合の領域において制御ゲインの最適値を計算により求めることができ(S5)、多入力多出力系にも適用可能になる。
(もっと読む)
アナログ出力回路、流量制御装置及び流量制御装置の出力異常判別方法
【課題】 デジタルアナログコンバータ等の異常を確実に検知するとともに安価なアナログ出力回路と、これを用いた質量流量制御装置を提供する。
【解決手段】デジタル演算回路からのデジタル出力信号をデジタルアナログコンバータとゲイン回路を介してアナログ信号を出力するアナログ出力回路である。デジタル演算回路には、パルスワイドモジュレーションとアナログデジタルコンバータが内蔵され、デジタルアナログコンバータのDAC出力信号と、パルスワイドモジュレーションの出力をローパスフィルタを介して一定電圧としたPWM信号とを加減算回路に入力し、加減算回路にてDAC出力信号とPWM信号との加減算結果を、アナログデジタルコンバータに出力し、デジタル演算回路は、加減算結果に基づいて、異常信号を出力する。
(もっと読む)
制御ユニットのバス拡張構造
【課題】 複数の制御ユニットを並列配備して、その対向接合されるケース壁において制御ユニット同士をコネクタ接続してバスの拡張を図るよう構成した制御ユニットのバス拡張構造において、安価に製作できるものでありながら、単一の基板に装備した第1コネクタと第2コネクタを、対向する一対のケース壁に互いに背中合わせ状態で配備できるようにする。
【解決手段】 基板21に連結固定した第1コネクタ24が、ユニット並列方向に向かう一方のケース側壁から外方に露出するよう配置し、第1コネクタ24に接続分離可能な第2コネクタ25から導出されたケーブル26を基板21に接続し、この第2コネクタ25をユニット並列方向に向かう他方のケース側壁から外方に露出するよう当該ケース側壁に支持し、制御ユニット2における対向するケース側壁の互いに対向する位置に、第1コネクタ24と第2コネクタ25とをそれぞれ背中合わせ状態で配備してある。
(もっと読む)
プロセスシミュレーション装置
【課題】 短時間で任意の入出力関係を定義できると共に、接続するコントローラに対して汎用性備えるプロセスシミュレーション装置を実現する。
【解決手段】 コントローラからの操作量を入力し、プロセスの応答を模擬する制御量を前記コントローラに出力するプロセスシミュレーション装置において、
前記操作量を入力ポートに読み込み、これに対して所定の演算を実行した結果を制御量として出力ポートに書き込むデータ連携手段を備える。
(もっと読む)
コントロール装置
【課題】バックボードからの電気信号とは別に、多量の電気信号や高速な電気信号を通すことが出来るコントロール装置を実現する。
【解決手段】バックボードに沿って設けられた複数のモジュールと、このモジュールの一端縁に設けられ前記バックボードにそれぞれコネクタ接続されるコネクタとを有するコントロール装置において、前記隣り合うモジュールの対向する面に対向して設けられこの隣り合うモジュール同士のずれを吸収してコネクタ接続されるフローティングコネクタ手段を具備したことを特徴とするコントロール装置である。
(もっと読む)
インタフェース装置およびインタフェース方法
【課題】 様々な情報家電を簡単に操作し、ユーザがその情報家電の状態を簡単に知ることができるように情報家電とユーザとの間を仲介するインタフェース装置を提供する
【解決手段】 インタフェース装置は、状態信号と反応信号とを関連付けて蓄積部15へ登録する登録部14と、蓄積部の状態信号と信号取得部からの状態信号とを照合する第1の照合部16と、蓄積部の反応信号と反応取得部からの反応信号とを照合する第2の照合部17とを備え、他の状態信号を取得した場合に他の状態信号と蓄積部の状態信号とを照合し、対応する場合、状態信号に関連付けられた反応信号をユーザへ表現し、対応しない場合、他の状態信号をユーザへ表現し、このときユーザからの反応信号を他の状態信号と関連付けて登録し、他の反応信号を取得した場合、第2の照合部が他の反応信号と蓄積部の反応信号とを照合し、対応する場合には、反応信号に関連付けられた状態信号を電気製品へ出力する。
(もっと読む)
プラントの制御装置
【課題】非線形補償器を用いた制御において、非線形補償器の非線形補償を実際の非線形特性に適合させるようにしたプラントの制御装置を提供する。
【解決手段】線形要素と非線形要素とを含んだエンジンの可変位相機構42について、線形要素に基づいた応答指定型制御アルゴリズムに従ってプラントの出力Cainを位相目標値Cain_cmdに収束させる仮入力Uslを算出する線形コントローラ110と、仮入力とプラントの非線形要素の特性を相殺するように設定された非線形補償器112に基づいて制御入力Ucainを算出するプラントの制御装置において、線形要素のみから構成される制御対象モデル114aによって算出されたプラントの出力推定値Cain_estと、プラントの出力検出値Cainの誤差e_nlとに基づいて非線形補償器112を修正する非線形特性適応器(修正手段)114とを備える。
(もっと読む)
伝達関数設定装置
【課題】 等しい極と零とを持たない伝達関数を一意に設定できるようにすること。
【解決手段】 行列Cの線形独立な列数が当該行列Cの列数と等しくなり、且つ、シルベスタ行列Dの線形独立な列数が当該シルベスタ行列Dの列数と等しくなるように、伝達関数G(z)の係数a1、a2、…、an、b0、b1、…、bn及び次数nを設定するようにした。そのため、行列解析を行うことで、伝達関数G(z)に等しい極と零とを持たせない係数a1、a2、…、an、b0、b1、…、bn及び次数nを設定することができる。それゆえ、例えば、行列Cの解析等で係数や次数を設定して伝達関数G(z)を設定した後に、その設定した伝達関数G(z)の極と零とを複素平面にプロットし、等しいと判断できる極と零とを恣意的に取り除かせる方法とは異なり、等しい極と零とを持たない伝達関数G(z)を一意に設定することができる。
(もっと読む)
1 - 16 / 16
[ Back to top ]