
Fターム[5H004MA47]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | 表示装置 (31)
Fターム[5H004MA47]の下位に属するFターム
画像表示 (3)
文字、数値の表示 (9)
メータ、グラフの表示 (5)
Fターム[5H004MA47]に分類される特許
1 - 14 / 14
バックアップ装置およびバックアップ方法

【課題】制御アナログ信号から所定信号に確実に切り換えて制御対象装置に入力することができるバックアップ装置を得る。
【解決手段】制御対象装置2の制御に用いられる制御アナログ信号が入力され、入力された制御アナログ信号の異常を検出する制御アナログ信号異常検出装置302と、予め設定された所定信号を発生させる所定信号発生装置303と、制御アナログ信号異常検出装置302の検出結果に基づいて、制御アナログ信号と所定信号とを切り換えて出力する切換回路304とを備え、切換回路304から出力された制御アナログ信号または所定信号を制御対象装置2に出力する。
(もっと読む)
外乱制御装置、外乱制御方法、外乱制御プログラムおよび記録媒体

【課題】多入出力プラントにモデル予測制御を適用した場合においても、外乱抑制性能を向上させ、少ない計算量で低コストに実現でき、ステップ応答試験の結果のみから構成可能であって、且つモデル予測制御の操作量制約を逸脱しないことを可能にする外乱制御装置等を提供する。
【解決手段】制御装置40は、モデル予測制御機能10により計算された制御量予測値y*と多入出力プラント30から出力された制御量信号yとの差である制御量予測誤差eを計算する制御量予測誤差計算部42と、予めモデル予測制御機能10により取得されたステップ応答終端値dPVと制御量予測誤差計算部42により計算された制御量予測誤差eとに基づき外乱推定値d*を計算する外乱推定部44と、外乱推定部44により計算された外乱推定値d*に基づきモデル予測制御機能10により計算された操作量uを修正した修正操作量umodを出力する外乱抑制部46とを備えている。
(もっと読む)
調節計
【課題】所望のパラメータを速やかに表示することができる調節計を提供する。
【解決手段】複数のパラメータを用いて、調整対象を調整する調節計であって、パラメータを表示する表示部20と、複数のパラメータの表示順をパラメータに対応付けて記憶する設定パラメータ記憶部7と、表示順に応じた遷移経路にしたがって、表示器に表示されるパラメータを切換える表示切換用キーと、複数のパラメータのうち、ユーザによって選択された選択パラメータを記憶する選択パラメータ記憶部8と、表示部20に対して、前記選択されたパラメータを優先的に表示させる第1ユーザファンクションキーと、を備えている。そして、選択パラメータ記憶部8に記憶される1つの選択パラメータとして、2以上のパラメータを含むパラメータ群を設定可能になっている。
(もっと読む)
モデル予測制御装置、プログラム
【課題】制約付きモデル予測制御において制約の緩和回数が増えて実行時間オーバを起こす可能性を低くする。
【解決手段】条件付き最適化計算に用いる制約の復帰処理において、現在の制御量検出値yが特定の制約復帰条件を満たすかどうかを判断し(ステップS21)、満たす場合のみ制約緩和レベルは一段復帰させる(ステップS22)。所定の制約復帰条件を満たさない限り制御量制約の復帰を行わないようにすることで、制約付き最適化計算において解なしとなる可能性を低くし、以って、制約の緩和が再度必要になる可能性を低くできる。これより、計算負荷が大きい制約付き最適化処理の頻度が大きくなることを防止し、実行時間増大を防止できる。
(もっと読む)
比較判定装置及び比較判定方法
【課題】プラントモデルを用いたダイナミックシミュレーションにおける予測の精度を高めることである。
【解決手段】シミュレーション装置10は、実プラントの測定データと、前記実プラントのプラントモデルのトラッキングモデル部113と同じプラントモデルの解析モデル部115によりシミュレーションされた将来の予測結果を示す予測データと、が記憶されるデータベース30から、前記測定データ及び前記予測データを読み出し、当該測定データ及び当該予測データの差分情報を算出し、当該差分情報に応じて当該差分情報に応じて測定データ及び予測データに誤差が発生したか否かを判定し、当該誤差が発生した場合に、トラッキングモデル部113の同定計算を行う同定モデル部114に、前記差分情報を前記同定計算に用いる誤差情報として出力する比較判定部112を備える。
(もっと読む)
プラント制御装置、プラント制御方法、プラント制御プログラム、および、そのプログラムを記録した記録媒体
【課題】運転状態が大きく変動する場合でも熟練を要さずに安定した良好な運転状態に制御できるプラント制御装置を提供する。
【解決手段】運転内容変更認識手段343により運転内容がナフサを処理する定常運転である場合、状態制御手段342にてセンサ400で検出した運転状態データを第一目標値にするPID制御をする。コーク除去の非定常運転の場合、付加制御手段344は、状態制御手段342にてセンサ400で検出した運転状態データを第二目標値にするPID制御か、状態制御手段342にて制御する制御量に制御量データの値を加算させてPID制御を実施させる。
(もっと読む)
制御器、制御方法および制御プログラム
【課題】計算量を減少させて、実タスクへ適用可能な方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果により定常分布の対数の偏微分を推定することで、方策の勾配を推定し、推定結果に基づいて、方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
プラントの制御装置
【課題】本発明の目的は、修正したモデルを用いた学習を高速化して制御アルゴリズムを修正しプラントを精度良く制御するプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントの運転特性を解析する数値解析実行部と、の数値解析結果の情報を基にプラントの制御特性を模擬するモデルと、前記モデルを用いてプラントの操作方法を学習する学習部と、前記学習部の学習情報データを保存する学習情報データベースと、前記学習部の学習情報データを基に状態入力をモデル入力次数より少ない入力数で表現するパターンデータを生成するパターン生成部と、前記パターン生成部で生成したパターンデータを保存するパターンデータベースと、複数のパターンを用いて学習した学習結果の中から制御効果の良い学習結果を選択する学習結果判定部を備え、選択した学習結果に基いて操作信号生成部でプラントに対する操作信号を算出するように構成。
(もっと読む)
モデルパラメータ推定演算装置及び方法、モデルパラメータ推定演算処理プログラム並びにそれを記録した記録媒体
【課題】1入力複数出力系の一次遅れシステムにおいて、質や量の不十分な入出力波形データからでも、精度と信頼性の高いモデルパラメータを推定演算してモデルを構築する。
【解決手段】入出力データに基づいて1入力複数出力系の一次遅れシステムのモデルパラメータを推定して演算するモデルパラメータ推定演算装置10において、当該モデルパラメータ推定演算装置10は、上記入出力データに基づいて、上記1入力複数出力系の一次遅れシステムの時定数と定常利得との少なくとも1つを含む先験的情報を、制約条件と評価関数のうちの少なくとも一方として考慮して上記モデルパラメータを推定演算する。ここで、上記先験的情報は、時定数と定常利得の上限値と下限値の少なくとも一方である。
(もっと読む)
モデル作成装置並びにプロセス異常分析装置およびそれらの方法並びにプログラム
【課題】 同一のレシピのサンプル数が少なくても精度の高い品質−モデルを作成できるモデル作成装置を提供すること
【解決手段】 プロセスが実行されている期間中に時系列に取得されるプロセスデータからプロセス特徴量を抽出するプロセスデータ編集部22と、そのプロセスで処理された対象品の検査結果についての情報である検査データ中の計測値と、設計値と、の差分を求める検査データ編集部27と、プロセス特徴量と検査データとを用いて、データマイニングや多変量解析による解析を実行する際に、検査データ編集部で求めたプロセス処理の結果得られた計測値とその設計値との差分を目的変数とし、抽出したプロセス特徴量データを説明変数としてプロセス−品質モデルを作成する解析部32と、を備えた。差分を目的変数とすることで、異なるレシピから得られたデータをサンプルとして使用できるので、必要なサンプル数を容易に取得し、高精度なモデルが作成できる。
(もっと読む)
プラントモデルのパラメータ調整装置
【課題】複数のパラメータを同時に調整し、パラメータ調整時間を短縮すると共にシミュレーションの精度向上が可能なプラントモデルのパラメータ調整装置を実現する。
【解決手段】プラントモデルのパラメータ調整装置において、表示部と、入力部と、ネットワークを介してプラントからの運転データを受信する通信部と、運転データ及びプラントモデルからの出力値を格納する記憶部と、運転データ及び出力値を用いて動的パラメータを調整する動的パラメータ調整機能と、静的パラメータを調整する静的パラメータ調整機能と、動的パラメータ及び静的パラメータを用いてシミュレーションを行い、出力値が予め設定された許容範囲内に入るまで調整及びシミュレーションを繰り返す運転データ追従機能とを有する演算制御部とを備える。
(もっと読む)
冷却系を運転するための制御系及び制御方法
本発明は、構成要素として少なくとも圧縮器2、蒸発器3、圧力制御素子6及び凝縮器4を備え、制御回路9を有する冷却系を運転するための制御系において、制御回路が少なくとも幾つかの冷却系の構成要素との電気接続部を有し、構成要素を通して制御回路9が時間インターバルにわたって、電気的動作変数を連続的に測定及び記憶し、制御回路が、冷却系の電気的動作変数の少なくとも幾つかの測定値と幾つかの記憶値の間の相関関係を確立し、この電気的動作変数の少なくとも幾つかの測定値と幾つかの記憶値と、冷却系の電気的動作変数の少なくとも幾つかの測定値と幾つかの記憶値の間で確立された相関関係とに基づき、冷却系に関する制御信号を発生させることを特徴とする制御系に関する。 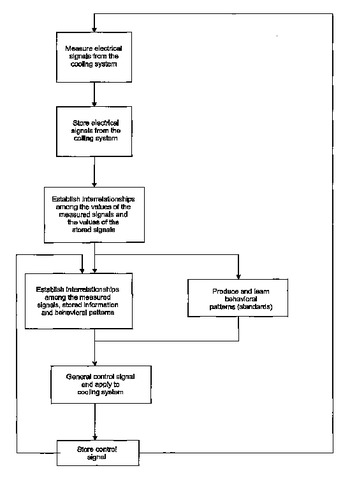 (もっと読む)
(もっと読む)
制御装置
【課題】繰り返し試行する時間を省くことで力制御ゲインの設定及び調整を容易に行うことができる制御装置を提供する。
【解決手段】力制御回路7の内側に位置制御回路8を有する力制御システムによりロボット1を力制御する制御装置において、ロボット1を駆動する実際の制御条件で、ロボット1の個々の駆動軸に関する位置制御回路8の時定数Tを取得する時定数取得手段11と、ロボット1を駆動する実際の制御条件で、ロボット1の剛性値Kを取得する剛性値取得手段12と、力制御回路7の時定数が位置制御回路8の時定数Tより大きくなる条件で、時定数取得手段11で取得された位置制御回路8の時定数Tと剛性値取得手段12で取得された剛性値Kとから力制御回路7の力制御ゲインを算出するゲイン自動算出手段10と、を備える。
(もっと読む)
リソグラフィ装置、位置量コントローラ及び制御方法
【課題】第1の可動部と第2可動部の相対位置誤差を小さくしたリソグラフィ装置、位置量コントローラ及び制御方法を提供すること。
【解決手段】リソグラフィ装置は、第1の可動要素と、第1の可動要素の位置量を制御するための第1の制御システムとを備える。また、リソグラフィ装置は、第2の可動要素と、第2の可動要素の位置量を制御するための第2の制御システムとを備える。トラッキング誤差即ち第1の可動部と第2の可動部の間の相対誤差を小さくするために、第1及び第2の制御システムに提供される設定値信号に同期してフィードフォワード信号を生成するためのフィードフォワード・テーブル・プログラミングを備えたフィードフォワード・テーブルが提供される。第1の可動要素の位置量を修正し、それにより第1の可動要素の位置量と第2の可動要素の位置量の間の相対誤差を小さくするために、第1の制御システムにフィードフォワードが提供される。
(もっと読む)
1 - 14 / 14
[ Back to top ]