
Fターム[5H115QE03]の内容
車両の電気的な推進・制動 (204,712) | 制御時の状態 (7,652) | 高速走行時 (227)
Fターム[5H115QE03]に分類される特許
221 - 227 / 227
車両用駆動装置の制御装置
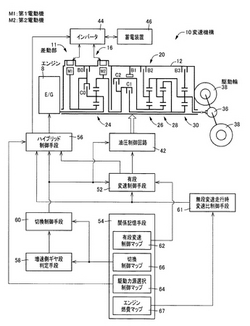
【課題】 電気的な無段変速機として作動可能な変速機構における変速制御を好適に行う制御装置を提供する。
【解決手段】 電気的な無段変速機として作動可能な無段変速状態と定変速比状態とに切り換え可能な差動部11と、予め定められた関係から車速及び車両負荷乃至車両用駆動装置の出力トルクに基づいて差動部11を無段変速状態及び定変速比状態のうち何れかに選択的に切り換える切換制御手段60とを、含むことから、差動部11を含む電気的な無段変速機として作動可能な変速機構10における変速制御を好適に行う制御装置を提供することができる。
(もっと読む)
電動補助自転車

【課題】補助動力を有効にした走行距離を飛躍的に伸ばすことを課題とする。
【解決手段】回生状態または非回生状態に選択され、回生状態においては電動補助自転車の運動エネルギーによって発電してバッテリ3を充電すると共に、非回生状態においては発電を停止する電動モータ1と、電動補助自転車の走行速度を検出する速度検出部5と、速度検出部5の検出した走行速度が所定の速度以上の際に電動モータ1を回生状態に設定する制御手段とを備える。
【効果】電動補助自転車の走行エネルギーを有効に利用してバッテリの充電を行うことができ、走行距離を飛躍的に伸ばすことができる。バッテリの充電は、所定速度以上で走行している際にのみ行われ、所定速度未満での走行時には、電力駆動系による駆動力によって走行を補助するので、低速域での走行安定性に支障を来すことはない。
(もっと読む)
車両用駆動装置の制御装置
【課題】 差動作用により電気的な差動装置として機能する差動機構とその差動機構から駆動輪への間に自動変速機とを備える車両用駆動装置において、動力伝達経路が動力伝達遮断状態から動力伝達可能状態へ切り換えられる際のシフトショックを抑制する制御装置を提供する。
【解決手段】 エンジン8が作動状態にあり、動力伝達可能状態を選択する駆動ポジションと動力伝達遮断状態を選択する非駆動ポジションとに手動操作により切り換える操作装置46が非駆動ポジションから駆動ポジションへ切り換えられたときに、トルクダウン制御手段82により自動変速部20に入力される入力トルクTINが低減されるので、動力伝達経路を動力伝達可能状態に切り換える際の係合装置の係合時に伝達されるトルクが低減されてシフトショックが抑制される。
(もっと読む)
動力出力装置および自動車並びに動力出力装置の制御方法
【課題】 内燃機関の運転に伴うこもり音の発生を抑制すると共にエネルギ効率の向上を図る。
【解決手段】 エンジンからの動力をプラネタリギヤと二つのモータMG1,MG2とによりトルク変換して駆動軸に出力して走行するハイブリッド自動車において、モータMG1の発電量Pchgに基づいてこもり音の発生を回避するエンジン22の動作ラインを設定し(S140)、この設定した動作ラインに基づいてエンジンとモータMG1,MG2を制御する(S150〜S200)。これにより、エンジンの運転に伴って生じ得るこもり音の発生を抑制すると共にできる限りエンジンを効率よく運転することができる。
(もっと読む)
車両用回転電機
【課題】 起動トルク特性及び電圧飽和域におけるトルク特性を両立させることができる車両用回転電機を得る。
【解決手段】 車両用の発電電動機5は、インバータ3を介してバッテリ1により駆動される。インバータ3から接続端子6dの端子間に印加可能な電圧の最大値を最大電圧Vmaxとし、この最大電圧Vmax印加の条件下において力率1でかつ電圧飽和時のトルクを最大とするためにインバータ3から接続端子6dへ供給すべき電流を最大電流Iamaxとするとき、電機子巻線6bは、次の式で表される2Ra0=Vmax/(√3)Iamaxに対して、接続端子6d間の抵抗2Raが0.8Ra0≦2Ra≦3.8Ra0を満たすようにされているものである。この条件にて、起動トルク特性及び電圧飽和域におけるトルク特性の両立が可能となる。
(もっと読む)
移動用電動車両
【課題】 脚に障害を持つ人や脚力の衰えが見える高齢者が使用する移動用電動車両であって、搭乗者が脚を用いて駆動力を発生させる機能を有することによって機能回復訓練に効果を発揮するとともに、チェーンやギヤ等のトルク伝達機構を排除することによってその機構が簡単化されかつ重量が軽減され、そのうえ操縦が容易でかつ乗心地のよい移動用電動車両を提供することを目的とする。
【解決手段】 搭乗者が脚で操作するペダルと、前記ペダルに設けられたペダルの回転角度を検出するセンサと、車両の駆動輪に駆動力を与える駆動手段と、駆動手段を制御する制御手段とを備え、前記制御手段は前記センサの検出信号に基づいて演算した駆動輪の回転角度および回転速度の指令値を前記駆動手段に出力して駆動手段を制御することを特徴としている。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】 パラレルハイブリッド車両において、モータMG2の制御に起因する振動を抑制し、乗り心地を向上する。
【解決手段】 エンジン、モータMG1、モータMG2および車軸をプラネタリギヤを介して結合する。エンジンおよびモータMG1から出力された動力をモータMG2で補償して要求動力を車軸から出力する。この制御では、まず上記補償に必要なトルクをモータMG2の仮目標トルクとして設定する。この仮目標トルクになまし処理を施して目標トルクを決定する。車両の走行状態に応じてなまし処理の程度を変える。停車中にエンジンの始動が開始された場合は、高い応答性でモータMG2を制御して車軸へのトルク変動を適切に相殺する。通常走行中にはやや低い応答性でモータMG2を制御して運転者のアクセル操作に対し滑らかに出力トルクを変える。
(もっと読む)
221 - 227 / 227
[ Back to top ]