
Fターム[5H115QE09]の内容
車両の電気的な推進・制動 (204,712) | 制御時の状態 (7,652) | 一定車速時 (85)
Fターム[5H115QE09]に分類される特許
1 - 20 / 85
ハイブリッド車両の制御装置
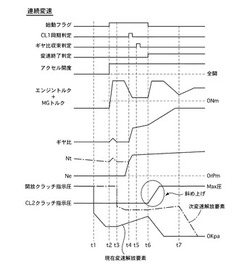
【課題】 連続変速時であってもショックを回避可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータとの間の駆動力の伝達を断接する第1クラッチと、モータから駆動輪へ伝達される駆動力の伝達を断接する第2クラッチと、自動変速機の変速中に、第2クラッチをスリップ状態とするスリップ制御手段と、を備えたハイブリッド車両の制御装置において、スリップ制御手段は、現在の変速と次の変速とを連続で行う連続変速中に、現在の変速が終了した後、かつ、次の変速が終了する前に第2クラッチのスリップ状態を完全締結状態に移行させる場合には、第2クラッチの締結圧を徐々に上昇させることとした。
(もっと読む)
ハイブリッド車両およびその制御方法

【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
ハイブリッド電気自動車の停車発電制御装置
【課題】車両停車中にバッテリのSOC低下に応じて停車発電制御を適切に実行でき、もって確実にバッテリのSOCを回復できるハイブリッド電気自動車の停車発電制御装置を提供する。
【解決手段】PレンジまたはNレンジでの車両停車中においてバッテリのSOCが充電判定値SOC0以上のときには(S10がNo)、インナクラッチC1及びアウタクラッチC2を切断状態に保持して油圧ポンプ駆動のためのエンジン負荷を軽減する一方(S12)、SOCが充電判定値SOC0未満のときには(S10がYes)、電動機3側のアウタクラッチC2のみを接続状態に切り換え(S16)、停車発電制御により電動機3をジェネレータ作動させてバッテリ5を充電する(S18)。
(もっと読む)
ハイブリッド電気自動車の回生制御装置
【課題】惰行運転時においてエンジン減速モードとモータ減速モードとの間の制動力の格差に起因する減速感の相違を解消した上で、モータ減速モードでは電動機の回生制御により最大限の発電量を実現できるハイブリッド電気自動車の回生制御装置を提供する。
【解決手段】モータ減速モードによる車両の蛇行運転時において、エンジンと電動機との間のクラッチを切断して、電動機の回生トルクを最大トルクライン上で制御することにより車両の減速エネルギの全てを回生発電に利用すると共に、最大トルクライン上におけるエンジンブレーキ近傍の回生トルクが得られる電動機の回転域でシフトダウンを実行することにより、エンジン減速モードと同様に減速感を実現する。
(もっと読む)
電動車両の走行制御装置
【課題】高効率での電動車両モータ駆動制御を行い、低電費な電動車両向け走行制御装置を提供する。
【解決手段】電動車両の走行制御装置は、実車速とモータの力行及び回生に関する駆動状態とに基づいて、電費効果代をもたらすモータの制駆動に必要な最高効率モータトルクを演算する演算部と、アクセル開度及び実車速に基づいて、モータを最高効率モータトルクで制駆動させて車両を走行させる第1期間と、モータを制駆動させずに車両を惰行させる第2期間との期間配分を演算する演算部と、第1期間における走行と第2期間における惰行とが交互に繰り返されるように、モータをパルス状に制駆動するための目標モータトルクを演算する演算部と、目標モータトルクに応じてモータをパルス状に制駆動することにより車両の走行制御を行う制駆動ECUとを備える。
(もっと読む)
車両
【課題】1つの駆動源を用いて駆動タイヤとサスペンションのそれぞれを作動させることができる車両。
【解決手段】駆動源8と、駆動源8から出力される駆動力によって回転可能な駆動輪3と、駆動源8から出力される駆動力によって作動するサスペンション7と、駆動源8と、駆動輪3またはサスペンション7との接続を切り替える切替え手段23とを有する走行装置4を備える車両を提供する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】前輪と後輪とを別々のモータで駆動する構成においてモータの発熱を的確に抑制しつつて走行安定性を確保する上で有利なハイブリッド電気自動車の制御装置を提供する。
【解決手段】フロントモータ18、リアモータ20のうち、一方のモータに分配される駆動トルクTrq1が一方のモータの基準トルクを超過したと判定された場合、他方のモータで駆動される車輪にスリップの発生が否と判定されたときに、一方のモータに分配される駆動トルクTrq1を基準トルクより低減させると共に他方のモータに分配される駆動トルクTrq2を増大させて要求トルクを満足させる。他方のモータで駆動される車輪でのスリップの発生が有と判定され、かつ、エンジンにより駆動される車輪と一方のモータにより駆動される車輪とが同じ車輪である際に、駆動トルクTrq2の増大を禁止して、エンジンに分配される駆動トルクを増大させて要求トルクを満足させる。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に一時加速してから、再びクルーズ走行に復帰する際の違和感を抑制する。
【解決手段】クルーズ要求トルクTcがアクセル要求トルクTaよりも大きい状態から(S14の判定が“No”)、アクセル要求トルクTaがクルーズ要求トルクTcよりも大きくなり、一時加速した場合には(14Sの判定が“Yes”)、禁止フラグをFNG=1にセットし(S25)、許可フラグはFOK=0にリセットする(S26)。その後、運転者のアクセル操作が解除されても(S35の判定が“Yes”)、自車速がクルーズ要求トルクTcに従ったクルーズ要求車速に戻るまでは(S29の判定が“No”)、禁止フラグがFNG=1、及び許可フラグがFOK=0の状態を保持し、一時加速後のエンジンの停止を禁止する(S37)。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】定速走行制御時における頻繁なエンジンの始動・停止が行われるのを防ぐこと。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両において、走行速度をステアリングスイッチで設定された目標速度を維持するように自動調整する定速走行制御を行っているとき、エンジン1の始動後モータジェネレータ2の駆動源であるバッテリが設定したクルーズ時SOC停止判定値に充電されるまでの間、エンジン1の停止を禁止する制御を行う。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に設定車速が増加し、その設定車速を達成するまでの違和感を抑制する。
【解決手段】モータ2のみを駆動し、EVモードでクルーズ走行している状態で、運転者のスイッチ操作によって設定車速Vsが増加したら(S11、S13、S16の全てが“Yes”)、禁止フラグをFNG=1にセットしてエンジン1の始動を禁止する(S29)。このとき、モータトルク上限値TLを増加補正する(S24、S25)。車速Vが設定車速Vsまで増加し(S28の判定が“No”)、且つクルーズ要求トルクTcが始動判定閾値TONより小さければ(S36の判定が“No”)、加速期間が終了したと判断して、モータトルク上限値TLを増加補正前の通常値に復帰させる(S31)。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】ハイブリッド車両の自動走行制御時において、エンジンの駆動力による発電時の発電量の急激な変動によって発生する速度変動を抑えることを可能とする。
【解決手段】駆動輪7L,7Rに駆動力を伝達する駆動源としてエンジン1及びモータジェネレータ2を有するハイブリッド車両の走行状態を、ステアリングスイッチで設定された目標走行状態で維持するように自動調整する制御であるオートクルーズ制御を行っているときに、モータジェネレータ2による発電においてエンジン1に要求する要求エンジン発電トルクの変化率の上限値を、通常走行制御時の上限値よりも小さい値に制限する制御を行う。
(もっと読む)
列車制御装置及び列車制御方法
【課題】共振式軌道回路を使用して新たな周波数を使用しないで速度制御の多段化指示を行い、運転時分の最適化や曲線部の速度制御を実現する。
【解決手段】共振式の軌道回路2Tに送信器4bから先行列車の位置や進路開通等により変化する情報に加えて軌道回路2Tの区間の線路勾配や曲線半径等の線路構造に関する情報や臨時速度制限情報等の情報を有するデジアナ信号波を送信する。車上装置3は受信したデジアナ信号波に含まれる先行列車の位置や進路開通等により変化する情報に加えて軌道回路2Tの区間の線路勾配や曲線半径等の線路構造に関する情報や臨時速度制限情報等の情報に基づいて許容走行速度を決定する。
(もっと読む)
電気車制御装置
【課題】電気車制御装置の定速制御は、速度域により走行抵抗の大きさが異なるため、定速目標速度との差速度に応じたトルクの均衡点が変化し、定速目標速度の精度が悪化する欠点があった。
【解決手段】本発明は以上の点を解決する為、速度域に応じた走行抵抗を加味した複数個の定速制御トルクパターンを予め用意し、定速制御開始時の速度に応じ最適な定速制御トルクパターンを選択する。定速目標速度に対する定速制御速度の精度向上効果がある。
(もっと読む)
車両用ハイブリッド駆動装置
【課題】発進クラッチが遮断されたモータ駆動走行モードから充電制動走行モードへ移行した場合でも、効率良くバッテリーを充電できるとともに大きな制動力が得られるようにする。
【解決手段】発進クラッチ26が遮断されたモータ駆動走行モードでの走行中にブレーキペダルが踏込み操作された場合に、前輪側要求制動力に対応する必要発電トルクTyoukyuが第2モータジェネレータMG2の最大発電トルクTMG2max を超える時には、その発進クラッチ26を締結し、第1モータジェネレータMG1および第2モータジェネレータMG2を何れも発電制御して上記前輪側要求制動力を発生させるとともに、得られた電気エネルギーでバッテリー46を充電する。これにより、2つのモータジェネレータMG1およびMG2を有効に用いてバッテリー46を効率よく充電できるとともに、大きな制動力が得られるようになり、エネルギー効率が向上する。
(もっと読む)
列車制御装置
【課題】自列車の位置を正確に検出できない路線においても、勾配のある区間で速度を目標速度バンド内に精度よく保って走行する。
【解決手段】本発明の一実施例に係る列車制御装置は、現在の列車速度をサンプリングして、加減速度を演算する加減速度演算部15と、前記加減速度及びノッチ特性に基づいて、走行路の勾配抵抗を求め、前記勾配抵抗及びノッチ特性を用いて所定時間後の列車速度を予測する速度予測部17と、所定時間後の列車速度が速度追従バンド内に収まるよう、ノッチ指令を決定するノッチ指令決定部18とを具備する。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による制動時、回生トルクと液圧制動トルクが付与される回生制動輪の制動トルク配分が過多になるのを抑え、車両挙動の安定化を図ることができる電動車両の制御装置を提供すること。
【解決手段】上流圧制御タイプの液圧ブレーキユニットと、左右前輪30,31に対して回生トルクを与える回生ブレーキユニットと、制動操作時に目標制動トルクTQを算出する目標制動トルク算出手段(図3のステップS1)と、回生協調制御による制動時、左右前輪30,31の制動トルク配分が、左右前輪30,31にロック傾向が発生する制動トルク配分よりも小さくなるように決定した回生トルク値を、回生許可トルクRBとする回生許可トルク決定手段(図3のステップS2〜ステップS11)と、目標制動トルクTQに対して回生許可トルクRBで不足する分を、摩擦ブレーキトルクFBで補う制御を行う回生協調制御手段(図3のステップS12〜ステップS14)と、を備えた。
(もっと読む)
目標速度算出機能を備えた列車制御装置
【課題】ダイヤ通りの走行を条件として列車の目標速度を適応的に算出する列車制御装置を提供する。
【解決手段】自列車と先行列車との間の閉塞区間数である開通区間数の変更履歴を取得する第1の取得手段と、前記先行列車が在線する閉塞区間の1つ前の閉塞区間の終点を起点にブレーキパターンを設定する設定手段と、前記変更履歴に基づいて、前記先行列車が在線する閉塞区間を抜けるまでの時間を算出し、前記ブレーキパターンと抵触しない範囲での最高速度を前記自列車の目標速度として算出する算出手段とを備える。
(もっと読む)
1 - 20 / 85
[ Back to top ]