
Fターム[5H115RB26]の内容
車両の電気的な推進・制動 (204,712) | 走行用電動機の制御 (3,810) | 交流電動機の制御 (1,401) | ベクトル制御 (264)
Fターム[5H115RB26]に分類される特許
1 - 20 / 264
電気自動車
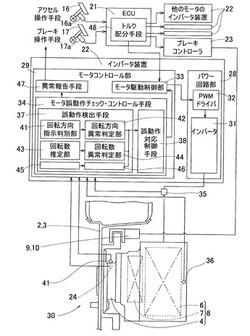
【課題】 モータが制御系のノイズ等で誤動作した場合に、瞬時にこれを判断して安全処置を採ることができる電気自動車を提供する。
【解決手段】 ECU21の出力するトルク指令と、モータ6またはこのモータ6で駆動される車輪2,3の回転信号、回転方向信号、およびモータ電流のいずれかとを常時監視し、この監視した情報を基に、定められた規則に従ってモータ6の誤動作を検出する誤動作検出手段37を設ける。この誤動作検出手段37で誤動作が検出されると前記モータ6への駆動電流の停止、および機械式ブレーキ9,10による制動のいずれかまたは両方を行わせる誤動作対応制御手段38を設ける。
(もっと読む)
電気自動車

【課題】 モータコイルの短絡異常を早期に検知し、車両走行上の問題を回避し得る電気自動車を提供する。
【解決手段】 電気自動車において、車輪2を駆動するモータ6は、3相の各モータコイルの一端が中性点で接続されるスター結線により結線された同期モータであり、モータコイルの短絡異常を検出する短絡異常監視手段95と、この短絡異常監視手段95で短絡異常が検出されると、前記中性点P1から各モータコイルを電気的に切断する異常時切断手段Esを設けた。
(もっと読む)
電気自動車
【課題】 電気制御式の操舵機構の異常や、左右の駆動輪のモータ駆動系の異常に対し、操舵機構と左右個別のモータとによる旋回走行の相互補完機能を利用し、上記異常の発生時に、ドライバーの意図した方向に進めるように制御できる電気自動車を提供する。
【解決手段】 左右の駆動輪2,2を駆動する独立したモータ6,6と、転舵機構11に機械的に連結されていないステアリングホイール14により操舵する操舵機構12を備える電気自動車に適用する。異常時補完手段37として、操舵系の異常の検出によって、その異常による転舵不足を補うように、左右駆動輪2,2のトルク指令の配分を変更する異常対応トルク配分変更部39を設ける。また、車輪駆動系の異常検出によって、その異常による左右両駆動輪2,2の駆動バランスの変化量を補うように、操舵機構12の転舵用モータ13の回転量を変更する異常対応転舵量変更部38を設ける。
(もっと読む)
車両走行用モータの制御装置及びそれを搭載した車両
【課題】電気自動車やハイブリッド自動車いずれの場合であっても、冷間始動のバッテリ暖機のスピードアップと環境配慮に充分に対応できる車両走行用モータの制御装置及びそれを搭載した車両を提供する。
【解決手段】車両走行用駆動モータをベクトル制御するモータ制御装置であって、暖機要の場合には、(i)車両が停止中は、モータのベクトル制御のq軸電流値を零或いは、もし制動解除ならば車両がクリープ走行し得る駆動トルクが生じる電流値に設定し且つバッテリ暖機運転可能なd軸電流値を設定し、(ii)車両走行中は、車両走行に必要な要求駆動トルクに応じてq軸電流値を設定し且つq軸電流値と協働してバッテリの暖機運転を促進するd軸電流値を設定し、前記(i)及び(ii)のいずれの場合にも、d軸電流値は、バッテリ温度が低いほど増えるよう設定されている。
(もっと読む)
電気自動車の制御装置
【課題】モータと変速機を備えた電気自動車において、クラッチを不要にして構成を簡易にすると共に、重量やコストの増加を抑制するようにした電気自動車の制御装置を提供する。
【解決手段】少なくとも運転者に操作されるアクセルペダルの開度に応じて車両に搭載されるモータの出力を制御するモータ出力制御手段と、変速指示がなされたとき、複数個の変速段ギヤを切り替える噛み合い式クラッチを有する変速機と、車両を制動可能な機械的なブレーキの動作を制御するブレーキ制御手段とを備えた電気自動車の制御装置において、モータ出力制御手段は、モータを回生させている間に変速指示がなされたとき(S10,S12,S18)、噛み合い式クラッチが複数個の変速段ギヤを切り替える前にモータの出力を零あるいはその近傍からなる所定値に制御すると共に(S22)、ブレーキ制御手段にブレーキを作動させる(S20)。
(もっと読む)
電動車両用電源装置
【課題】電源から負荷への電力供給を維持しつつ電源の接続状態を切り替える。
【解決手段】電動車両用電源装置1は、第1ノードAと第2ノードBとの間に接続された第1バッテリ11と、第2ノードBと第3ノードCとの間に接続された第1スイッチ(SW1)14と、第3ノードCと第4ノードDとの間に接続された第2バッテリ12と、第1ノードAと第3ノードCとの間に接続された第2スイッチ(SW2)15と、第2ノードBに接続されたDC−DCコンバータ13とを備える。DC−DCコンバータ13は、第2ノードBを第4ノードDに接続可能にするようにして第2ノードBの電位VBを変更する、又は、第2ノードBを第3ノードCに接続可能にするようにして第2ノードBの電位VBを変更しており、第1ノードAと第4ノードDとの間から取り出される出力電力は電動機(M)2に供給される。
(もっと読む)
電気車制御装置
【課題】粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる電気機関車の電気車制御装置を提供すること。
【解決手段】速度ゼロから切換速度に達するまでは速度センサ付ベクトル制御器CAによって加速制御を行い、これと併行して速度ゼロから速度センサレスベクトル制御器CBも動作させて主電動機1の電圧・電流から推定速度を演算する。この推定速度と速度センサ2から得た速度とから空転検知用速度演算器5により空転検知に用いる速度を演算し、この速度を各動輪速度とみなし、その最小値を基準速度に設定して各動輪速度の差速度によって空転検知器6により空転検知を行いながら加速制御を行う。この加速制御中の平均加速度と機関車の平均牽引力から牽引質量推定器9で牽引質量を推定し、閾値演算器8において空転検知の閾値を設定する。列車速度が切換速度以上になった後は、この閾値を用いて軸加速度による空転検知を行う。
(もっと読む)
電気車制御装置
【課題】インバータ周波数で発生するトルクリップルに起因する騒音を抑制する。
【解決手段】実施形態に係る制御装置は、電気車の主電動機を駆動する可変電圧可変周波数インバータ(VVVFインバータ)を制御する電気車制御装置であって、運転台からのノッチ指令値及び現在の速度に基づいて、前記インバータの第1電流指令値を演算する電流演算部11と、ノッチ指令0が入力された時、前記第1電流指令値を一定の傾きで減少させ、第2電流指令値を提供する電流制御部12と、前記電流制御部12からの前記第2電流指令値に基づいて、インバータゲート指令を生成するベクトル制御部13と、前記ノッチ指令0が入力された時、前記第1電流指令値又は前記インバータの出力電流実際値に基づいて、前記インバータへのゲート指令をオフするまでの時間を演算するオフ時間演算部16と、前記ノッチ指令0が入力された時から、前記オフ時間演算部にて演算された時間経過後、前記インバータへのゲート指令をオフする時間計測部14とを具備する。
(もっと読む)
車両制御装置
【課題】ゴムタイヤ等の低剛性体からなる車輪を駆動する誘導電動機が複数個接続された車両制御装置において、並列に複数個接続された各誘導電動機に流れる電流アンバランスによる特定電動機の過電流状態を抑制する。
【解決手段】各誘導電動機に流れる電流を用いて、電流アンバランスよる特定電動機の過電流を抑制する如くトルク制御の補正を行う。車輪を駆動する誘導電動機が複数個接続された車両制御装置において、複数個接続された各誘導電動機に流れる電流を検出する検出装置を備え、制御回路に接続し、検出した電流に応じてトルク指令を補正し、特定の誘導電動機の過電流を防ぐことを特徴とする。
(もっと読む)
電気車制御装置
【課題】 推定回転子位置が真の位置と異なった場合に、インバータの過電流や温度上昇を抑制することが可能な電気車の駆動制御装置を提供する。
【解決手段】 一実施形態に係る電気車制御装置は、直流を任意周波数の交流に変換し、同期電動機4を駆動する電力変換器3と、同期電動機4の回転速度を演算により推定する速度演算部67と、入力されるトルク指令及び速度演算部67により推定された回転速度に基づいて、電力変換器3の出力電圧を制御する制御部61〜64と、速度演算部67により推定された回転速度が異常な値となったことを判別し、制御部61〜64に異常が検出されたことを示す信号を出力する異常判別部73とを具備する。
(もっと読む)
インバータ制御装置および車両
【課題】回転電機の制御応答性を損なわず、トルク脈動の発生を抑制しながらも、積極的に周囲に対して注意を促すための音を発生させるようにする。
【解決手段】インバータ制御装置60は、指令値に対応する電流指令信号を指令する電流指令部61と、回転電機40の鉄心の磁気力により形成される振動を起因とする磁気音を発生させる磁気音信号を指令する磁気音指令部67とを有し、磁気音信号と電流指令信号とを重畳して指令する。この構成によれば、電流指令信号と磁気音信号とは相互に影響しないので、回転電機40の制御応答性を損なわず、トルク脈動の発生を抑制することができる。磁気音信号を重畳することで、積極的に回転電機40から磁気音を発生させて、低速走行時などで周囲に対して注意を促すことができる。
(もっと読む)
車両のモータ制御装置
【課題】交流モータを駆動する3相電圧型のインバータの1つのスイッチング素子の短絡故障が発生した場合でも、交流モータのトルクを制御できるようにする。
【解決手段】インバータ19の各相のスイッチング素子35〜40のうちの1つのスイッチング素子の短絡故障が発生したときに、短絡故障の発生時に使用可能な有効電圧ベクトルに対応する電気角区間(2相変調可能な電気角区間)では、短絡故障が発生した相以外の残りの2相のスイッチング素子のオン/オフを制御する2相変調で電圧制御して交流モータ12のトルクを制御するようにインバータ19を制御し、2相変調可能な電気角区間以外の電気角区間(1相変調可能な電気角区間)では、短絡故障が発生した相以外の残りの2相のうちのいずれか1相のスイッチング素子のオン/オフを制御する1相変調で電圧制御するようにインバータ19を制御する「2相及び1相変調制御」を実行する。
(もっと読む)
駆動装置
【課題】インバータと昇圧コンバータとを備える装置において、装置の故障を検出すると共に故障箇所をより正確に特定する。
【解決手段】モータMG1,MG2が駆動されている最中にバッテリ電流Ibを監視してバッテリへの過電流を検出した場合(S100,110)、所定期間に亘ってモータMG1,MG2の各相電流を入力しその絶対値の最大相電流をモータMG1,MG2毎に比較して各相の最大相電流が互いに一致するか否かをそれぞれ判定し(S120〜150)、各相の最大相電流が一致しないモータがあればインバータ24,25のうち各相電流が一致しないモータを駆動するインバータのオープン故障と判定し(S160〜180)、各相の最大相電流が一致しないモータがないときには昇圧コンバータ30の故障と判定する(S190)。
(もっと読む)
車両用回転電機の駆動制御装置
【課題】車両が停車又は低速走行しているときにおいて、特に過変調電流制御のキャリアに起因する騒音を十分に低減することが可能な車両用回転電機の駆動制御装置を提供することである。
【解決手段】駆動制御装置20は、キャリアに起因する騒音を低減する騒音抑制制御部30として、車速が予め定められた所定速度以下であるか否かを判定する車速判定モジュール31と、動作点が過変調電流制御領域内および特定実施領域内であるか否かを判定する動作点判定モジュール32と、車速が所定速度以下であり且つ動作点が過変調電流制御領域内および特定実施領域内であると判定されたときに、弱め界磁電流を流して動作点を特定実施領域外の正弦波電流制御領域にシフトさせる弱め界磁制御モジュール33と、キャリア周波数変更モジュール34とを有する。
(もっと読む)
ハイブリッド車両用制御装置
【課題】限られた状況に対応するための高い冷却性能を電動機に備えなくても、電動機の温度が上限温度を超えることを抑制して適切に電動機を保護する制御を行うことができるハイブリッド車両用制御装置を実現する。
【解決手段】電動機Mの状態が予め定められたゼロトルク制御実行条件を満たす場合に電動機Mの出力トルクをゼロにするゼロトルク制御を行うゼロトルク制御部13と、電動機Mの状態が、当該電動機Mの温度が所定の上限温度に達する可能性がある特定昇温状態であることを判定する昇温判定部15と、電動機Mのゼロトルク制御が実行されており、且つ昇温判定部15により特定昇温状態であることが判定されたことを条件として、発電機Gに発電を行わせて蓄電装置B1を充電し、電源電圧を上昇させる電圧上昇制御を行う電圧上昇制御部17と、を備える。
(もっと読む)
電気車制御装置
【課題】 速度センサレス制御において、電動機が極低速で回転している場合でも、電動機を制御するためのインバータを安定して始動することのできる電気車制御装置を提供することにある。
【解決手段】 速度センサレス制御を適用した電気車制御装置10であって、速度計11から極性のない速度情報Vを受信し、運転台9から前進/後進信号SDを受信し、速度情報V及び前進/後進信号SDに基づいて、極性付き速度情報VPを演算し、極性付き速度情報VPに基づいて、インバータ1の起動時を制御する。
(もっと読む)
回転機の制御装置
【課題】コンデンサとインバータとの間の電気経路を開閉するリレーが開状態とされる状況下、モータジェネレータの通電制御によってコンデンサの充電電圧を規定電圧以下に放電する際、モータジェネレータが回転し続けることを防止する。
【解決手段】指令電流設定部30によって設定される指令電流idr,iqrは、固定座標変換部50によってαβ座標系に変換された後、β成分の符号が反転され、回転座標変換部54によってdq座標系に変換される。これにより、dq変換部54の出力は、指令電流設定部30によって設定される指令電流idr,iqrをα軸に対して線対称変換したものとなる。放電制御に際しては、対称変換された指令電流にフィードバック制御される。
(もっと読む)
制御装置
【課題】複数の制御対象を制御するための処理の増加に対して柔軟に対応可能な制御装置を提供すること。
【解決手段】 複数の制御対象を制御する制御装置は、複数の制御対象の入出力電力に応じて、複数の制御対象を制御するための各処理の優先度を決定する優先度決定部と、単位時間中に行われると推定される複数の制御対象の各処理に要する合計時間の総和に応じて、複数の制御対象の少なくともいずれか1つの処理を省略するか否かを決定する処理省略決定部と、処理省略決定部によって処理を省略すると決定された場合、優先度決定部が決定した優先度に基づいて、複数の制御対象の内、どの制御対象の処理を省略するかを決定する省略処理決定部とを備える。
(もっと読む)
電気自動車
【課題】モータの意図しないトルク変動を防止することが可能な電気自動車を提供する。
【解決手段】電気自動車10は、インバータ26の上アーム素子84u、84v、84wが全てオンであり且つ下アーム素子90u、90v、90wが全てオフである、又は上アーム素子84u、84v、84wが全てオフであり且つ下アーム素子90u、90v、90wが全てオンである3相短絡状態において、スイッチ24a、24bを切り替える制御装置50を有する。
(もっと読む)
列車モニタ・データ伝送システムを有する列車制御装置
【課題】常に編成全体として粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる列車制御装置を提供すること。
【解決手段】先頭電動車の電気車制御装置B1で空転あるいは滑走を最初に検知すると、そのときの接線力係数Muj(B1)を推定し、この接線力係数と、先頭車から後方の車両における粘着係数の増大量データDeltaMujと、期待粘着係数Muz_expt等をもとに、各電気車制御装置B1,Ajにおける空車時のトルク指令値上限値Taujmaxz_aを求め、列車モニタ・データ伝送システム1を介して各電気車制御装置に対して伝送する。各電気車制御装置B1,Ajでは、上記トルク指令値上限値Taujmaxz_aから実際に発生すべきトルク指令値上限値Taujmax_actを求め、これを目標値として、各電気車制御装置の制御対象範囲の電動機でトルクを制御する。
(もっと読む)
1 - 20 / 264
[ Back to top ]