
Fターム[5H115RE05]の内容
車両の電気的な推進・制動 (204,712) | ハイブリット車用エンジンの制御 (4,806) | 燃料供給量 (410)
Fターム[5H115RE05]に分類される特許
121 - 140 / 410
車両の制御装置
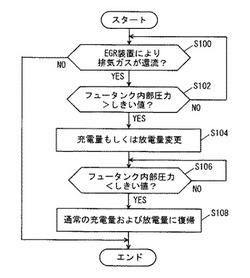
【課題】EGRにより排気ガスが還流される場合であっても、キャニスタに捕集された気化燃料のパージを行なう。
【解決手段】ハイブリッド車両には、エンジンと、フューエルタンクと、フューエルタンクから気化した燃料を捕集するキャニスタと、エンジンの吸気通路とキャニスタとを連結する通路に設けられたキャニスタパージ用VSVと、エンジンにより駆動されることにより発電する第1MGと、第1MGが発電した電力を蓄える走行用バッテリと、走行用バッテリから放電された電力により駆動する第2MGとが搭載される。ハイブリッド車両は、エンジンもしくは第2MGからの駆動力により走行する。HV−ECUは、キャニスタに捕集された気化燃料をパージする際、走行用バッテリへの充電量もしくは走行用バッテリからの放電量を変更するステップ(S104)を含む、プログラムを実行する。
(もっと読む)
ハイブリッド自動車および車載用変速機の変速時の制御方法

【課題】加速中に変速機を変速するときのトルクショックを低減する。
【解決手段】加速中に変速機をアップシフトするときには、変速前に駆動軸に走行抵抗に釣り合うトルクTdrvがエンジンから動力分配統合機構を介して出力されるようエンジンの目標トルクTe*を設定して制御してブレーキB2をオフし(S100〜S150)、モータMG2の回転数Nm2を変速後の回転数Nm2tgに同期させる直前にモータMG2の回転数Nm2が同期するときにモータMG2の回転数Nm2の変化率が急変するときに生じる変化率の急変を抑制する方向に作用するトルクを打ち消す方向でこれより小さなトルクを駆動軸に作用させるためにエンジンから出力するトルクとして同期時補正トルクTajを演算し(S190)、この同期時補正トルクTajによりエンジンの目標トルクTe*を補正して制御してブレーキB1をオンする(S200〜S220)。
(もっと読む)
動力出力装置、それを備えたハイブリッド自動車および動力出力装置の制御方法
【課題】触媒劣化を抑制するために燃料カットが禁止されている最中に駆動軸に対する減速要求がなされたときに内燃機関の回転数を速やかに低下させる
【解決手段】触媒劣化抑制フラグFcが値1に設定されて排ガス浄化触媒の劣化を抑制するためにエンジンの燃料カットが禁止されている最中にアクセルペダルの踏み込みを解除することによるリングギヤ軸に対する減速要求がなされたときに、バッテリ温度Tbが高いほどエンジンの吸入空気量を増加させる目標スロットル開度TH*の設定(S190)と各燃焼室への燃料噴射とを伴ってエンジンの回転数Neが予め定められた自立回転数Nrefまで低下すると共に要求トルクTr*に基づくトルクがリングギヤ軸に出力されるようにエンジンとモータMG1およびMG2とが制御される(ステップS170〜S250)。
(もっと読む)
昇圧回路の制御装置及びハイブリッド車並びに昇圧回路の制御方法
【課題】電動機のトルクに基づいて昇圧回路から高低異なる電圧の直流電力を電動機に供給する際のエネルギ効率を向上させる。
【解決手段】目標電圧VH*に高電圧Vhiを設定して高電圧制御を実行している最中にモータMG1,MG2のトルク指令Tm1*,Tm2*の絶対値の大きい方として設定された制御用トルクが高電圧制御を開始する閾値Vhi未満に至ったときからレートリミット処理により大きくなる閾値Tlow以下に至ったときに目標電圧VH*に低電圧Vlowを設定して低電圧制御を開始する(S160〜S190)。これにより、制御用トルクTmが一定値を保持する閾値以下に至ったときに低電圧制御を開始するものに比して、迅速に低電圧制御を開始して昇圧回路により高電圧系の電圧VHを高電圧Vhiまで昇圧する時間を短くし、エネルギ効率を向上させることができる。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】後進走行への登坂路で車両が略停止したときに登坂しやすくする。
【解決手段】後進方向への登坂路でシフトポジションがRポジションのときに第2モータから下限トルクTlimを出力すると共に車両が略停止する状態になったときには、第2モータからのトルクを増加(絶対値としては減少)させてから下限トルクTlimまで減少(絶対としては増加)させるのを車速Vが停止判定車速Vrefに値−1を乗じたもの以下となる条件を含む所定の解除条件が成立するまで繰り返し行なうトルク減増制御を実行し(S220〜S320)、第2モータのトルク減増制御を実行している最中に第2モータからのトルクが下限トルクTlimに至る最適タイミングtmgでモータMG1からの目標トルクTm1tgによるエンジンのモータリングによって駆動軸としてのリングギヤ軸に対応トルクを作用させる(S190,S200,S330,S340)。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】排気を吸気系に再循環する排気再循環装置の作動の有無に応じて内燃機関の運転ポイントを変更することにより燃費の向上を図る。
【解決手段】EGRオンのときには走行用パワーPdrvとEGRオンのときに用いる補正パワー設定用マップとを用いて補正パワーPajを設定し(S130)、EGRオフのときには走行用パワーPdrvとEGRオンのときに用いる補正パワー設定用マップとを用いて補正パワーPajを設定し(S140)、基本的には補正パワーPajと走行用パワーPdrvと損失Lossとの和により要求パワーPe*を設定し(S160)、要求パワーPe*と動作ラインとによりエンジンを運転すべき目標運転ポイントを設定し(S180)、エンジンを目標運転ポイントで運転すると共に走行用パワーが駆動軸に出力されて走行するようエンジンとモータMG1,MG2を制御する(S190〜S250)。
(もっと読む)
動力出力装置、それを備えたハイブリッド自動車および動力出力装置の制御方法
【課題】触媒暖機を実行すべきときに要求される動力を蓄電装置からの電力により賄いきれなくなって内燃機関の負荷を増加させても、触媒の活性化を促進させてエミッションの悪化を抑制する。
【解決手段】触媒暖機を実行すべきときに要求パワーP*が出力制限Wout以下となる場合、点火時期の遅角補正等を伴ってエンジンが触媒暖機用の運転ポイントで運転されると共に要求トルクTr*に基づくトルクが得られるようにエンジンやモータMG1,MG2が制御され(S140〜S200)、触媒暖機を実行すべきときに要求パワーP*が出力制限Woutを上回った場合には、点火時期の遅角補正等を伴ってエンジンが要求パワーP*に基づく運転ポイントで運転されると共に要求トルクTr*に基づくトルクが得られるようにエンジンやモータMG1,MG2が制御される(S240,S250,S160〜S200)。
(もっと読む)
蓄電容量推定装置および蓄電容量推定方法
【課題】二次電池の放電可能な蓄電容量をより適正に推定する。
【解決手段】蓄電量SOCが小さいほど内部抵抗が大きくなるバッテリの特性を考慮して、バッテリの蓄電量SOCの前回値としての前回SOCに基づく内部抵抗用補正係数Kaにより基準内部抵抗Rbaseを補正したものに充放電電流Ibを乗じることによってバッテリの内部抵抗により生じる電圧Vrを計算し(S140,S150)、バッテリの分極により生じる一次遅れ系に近似した電圧Vdynを計算し(S160〜S200)、バッテリの端子間電圧Vbから電圧Vrと電圧Vdynとを減じて得られる開放電圧Voに基づいて蓄電量SOCを推定する(S210,S220)。これにより、バッテリの蓄電量SOCをより適正に推定することができる。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】内燃機関の始動や運転停止が頻繁に行なわれるのを抑制する。
【解決手段】車速変化率ΔVが閾値ΔVref未満でアクセル変化率ΔAccが閾値ΔAref1より大きくなったときや車速変化率ΔVが閾値ΔVref以上でアクセル変化率ΔAccが閾値ΔAref2より小さくなったときには(S140〜S160)、それから所定時間tjrefが経過するまでは運転中のエンジンの運転停止や運転停止中のエンジンの始動は行なわずに走行し(S190,S320〜S400,S250,S260)、所定時間tjrefが経過した以降はアクセル開度Accに応じてエンジンを間欠運転しながら走行する(S210〜S310,S380〜S400)。これにより、エンジンの始動や運転停止が頻繁に行なわれるのを抑制することができる。
(もっと読む)
ハイブリッド車両のアクセル踏込反力制御装置
【課題】アクセル反力発生機構を利用して、バッテリの充放電量の最適化を図ることが可能な新規なハイブリッド車両のアクセル踏込反力制御装置を提供すること。
【解決手段】アクセル開度と車速とを含む車両状態に応じ、HEVモードとEVモードとに切り換える統合コントローラ10と、アクセルペダルAPの踏込反力を変更可能な踏込反力発生機構31と、充放電量に基づき、充放電量があらかじめ設定された目標範囲に向かう方向に、踏込反力発生機構31によりアクセルペダルAPの踏込反力を制御する踏込反力コントローラ30と、を備えていることを特徴とするハイブリッド車両のアクセル踏込反力制御装置とした。
(もっと読む)
内燃機関装置,自動車,可変バルブタイミング機構の制御方法
【課題】吸気バルブの開閉タイミングを変更する際の遅延時間をより適正に設定することにより、吸気バルブの開閉タイミングをより適正に行なう。
【解決手段】VVTコントローラの進角室の容量に、作動オイルの粘度Aおよび間欠停止時間Tstopに基づく間欠時間係数Bの逆数とギヤポンプの吐出量に冷却水温Twに基づく吐出量係数Cを乗じたものの逆数と作動オイルの粘度Aの逆数とを乗じて遅延時間DTを設定し(S100〜S140)、設定した遅延時間DTが経過してから吸気バルブの開閉タイミングVTが目標開閉タイミングVT*に向けて進角するよう進角を開始する(S150,S160)。これにより、より適正な遅延時間DTを設定することができ、遅延時間DTが長すぎることによるエンジンからのトルク出力の遅延や、遅延時間DTが短すぎることによる可変バルブタイミング機構の作動不良を抑制することができる。
(もっと読む)
車両用駆動装置
【課題】駆動力源の切換制御と変速制御とが重複する同時切換が生じる場合に、運転者の出力要求量の変化に対する駆動力変化の応答性の悪化を抑制しつつ、同時切換に起因してショックが発生することを防止する。
【解決手段】アクセル操作変化率Δθacc が正の所定値A以上の加速要求時に、駆動力源切換制御と変速制御とが重複する同時切換になるか否かを予測し(S1〜S3)、同時切換になることが予測されると、駆動力源切換マップのM→E切換線に従う本来の駆動力源切換に先立って、モータ走行からエンジン走行に切り換えるためにエンジン10の始動制御を開始する(S4)。このため、駆動力源の切換制御と変速制御とがずれて実施されるようになり、同時切換に起因するショックの発生が抑制されるとともに、エンジン走行への切換制御を本来の制御開始よりも先行して実施するため、運転者の加速要求に対する駆動力変化の応答性が向上する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電気式差動部を備える車両用動力伝達装置において、全体効率を一層向上して燃費向上を図る。
【解決手段】差動部11を備える動力伝達装置10の電子制御装置80において、電気パス効率の変化可能量とエンジン動作点の変化可能量とに基づいて、車両のシステム効率が最大となるように、電気パス効率及びエンジン動作点が変化させられるので、例えばエンジン8の暖機状態、第3電動機M3の温度状態などの車両状態に基づいて変化可能量が変えられる電気パス効率及びエンジン動作点に合わせて車両のシステム効率が可及的に向上させられる。よって、システム効率を一層向上して燃費向上を図ることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】駆動系に無段変速機CVTを有していても、良好な運転性を与えることができるハイブリッド車両の制御装置を提供すること。
【解決手段】駆動系に駆動源としてのエンジンEngおよびモータ(モータ/ジェネレータMG)と無段変速機CVTと駆動輪(左右後輪LT、RT)とを有し、変速制御手段(図3のフローチャート)を備えるハイブリッド車両の制御装置である。変速制御手段は、無段変速機の変速比を変更する際、大きな変更速度で変速比を変更する第1変速制御(最速速度での変速制御(ステップS11))を行った後、該第1変速制御よりも小さな変更速度で変速比を変更しつつ要求駆動力に応じて速度変化させる第2変速制御(中間速度での変速制御(ステップS12))を行なうことにより、要求駆動力に応じた速度変化を可能とし、駆動源の出力可能トルクに対して要求駆動力が大きくなるほど、第1変速制御を継続する時間(最速変更時間)を長く設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ドライバーの加速フィーリングの向上を図ると共に、車両パワーを円滑に推移させることができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータ(モータ/ジェネレータ)MGを有する駆動源と、モータMGと駆動輪LT,RTとの間に配置された無段変速機CVTとを駆動系に備えると共に、無段変速機CVTの変速制御を実行する変速制御手段(図5)を備えたハイブリッド車両の制御装置において、モータMG及びバッテリ9の状態から、モータアシスト可能なアシストパワー量を算出するアシストパワー量算出手段(ステップS4)を備えている。そして、変速制御手段(図5)は、無段変速機CVTの変速比をダウンシフト方向に変速する車両加速中に、この変速比をアップシフト方向に間欠的に変速する。さらに、このアップシフトに伴って生じるエンジンパワー減少量は、アシストパワー量以下にする。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】蓄電装置の温度が低いときでも走行に要求されるトルクを出力できるようにすると共に発電機が過回転しないようにする。
【解決手段】エンジンから出力すべき要求パワーPe*に対して電池温度θbが小さいほど小さくなる傾向のパワー用レート値Prtによるレート処理を用いて実行用パワーP*を設定し(S160,S170)、実行用パワーP*に基づいてエンジンの目標回転数Ne*,目標トルクTe*を設定し(S180)、エンジンが目標回転数Ne*,目標トルクTe*で運転されると共に駆動軸に要求トルクTr*が出力されて走行するようエンジン22とモータMG1,MG2を制御する(S190〜S250)。これにより、エンジンの目標回転数Ne*が急上昇することによって生じる駆動トルクの一時的な抜けの現象が生じるのを抑制することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両の加速応答性を確保することができると共に、ドライバーのアクセル操作に対するドライバビリティを向上できるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータ(モータ/ジェネレータ)MGを断接する第1クラッチCL1と、モータMGと駆動輪LT,RTとを断接する第2クラッチCL2とを駆動系に有したハイブリッド車両の制御装置において、第2クラッチCL2がスリップ締結した際に第1クラッチCL1を介したモータMGのトルクを用いてエンジンEngを始動させる発進制御手段(図4)は、停車状態を検出したときに第1クラッチCL1を締結する。
(もっと読む)
車両およびその制御方法
【課題】車両の制振制御を伴いながら車両のエネルギ効率をより向上させる。
【解決手段】車速Vが閾値Vref3未満,モータMG1のトルク指令Tm1*が閾値Tref1未満,モータMG2のトルク指令Tm2*が閾値Tref2未満,車速Vが閾値Vref1以上で閾値Vref2未満の領域であるときには、制振制御を行なうときには高電圧系の電圧をインバータの入力最大電圧V2に制御し、制振制御を行なわないときには高電圧系の電圧を電圧V2に制御する。そして、制振制御を行なう場合でも、所定経過時間が経過する毎に制振制御が必要か否かを判定する(S400〜S460)。これにより、過剰な制振制御を回避することができ、高電圧系の電圧を低めの電圧V2で制御する時間を長くすることができる。この結果、車両全体のエネルギ効率を向上させることができる。
(もっと読む)
ハイブリッド自動車
【課題】エンジンを停止する際に異音が生じるのを抑制すると共にある程度車両の燃費を良好なものとする。
【解決手段】エンジンを運転している最中にエンジン指令パワーが停止用閾値を下回ったときに、排気再循環装置により排気の吸気系への再循環(EGR)が行なわれており、エンジンに吸入される混合気の空燃比AFが理論空燃比より大きな所定空燃比AFref以上であるリーン状態であり、且つ、第2モータのトルク指令Tm2*が値0未満のときには、エンジンの運転を停止する際に異音が生じる可能性が大きいと判定して、EGRを停止した状態で次にエンジンを始動するときの始動性を良好なものとするための処理を行なうための運転時間t1に亘るエンジンの自立運転を行なった後にエンジンの運転が停止されるようエンジンを制御する。
(もっと読む)
車両のクラッチ制御装置
【課題】ドグクラッチの断接時に、駆動輪の回転数変動により、ギヤ鳴り、破損、変速ショックの発生を抑制可能な車両のクラッチ制御装置を提供すること。
【解決手段】車両状態検出手段が検出する車両状態に応じて、自動変速機ATの変速を制御するとともに、自動変速機ATの変速中は、ドグクラッチ構造の第2クラッチCL2を切断状態とするとともに、変速終了後に、噛合状態とする指令を行なう統合コントローラ14を備えた車両のクラッチ制御装置であって、統合コントローラ14は、左右駆動輪LT,RTの回転速度の変化が、あらかじめ設定された変速制限状態である場合は、変速を制限する変速制限判定処理を実行することを特徴とする車両のクラッチ制御装置とした。
(もっと読む)
121 - 140 / 410
[ Back to top ]